最近用同 smart使用111报文控制PN伺服实现基本定位,用的是西门提供的SINAMICS 库。http://www.ad.siemens.com.cn/club/bbs/PostStory.aspx?a_id=1564065&b_id=117&s_id=0&num=1#anch
SINAMICS库本身是不开放的,所以如果你使用过程中遇到什么BUG,那对不起你就只能等版本更新了。忽然好学虫上脑,要不自己试着写一下顺便学习一下111报文。说干就干,那就先给自己定个小目标写个轴使能MC_Power。
111报文的介绍可以看V90PN的手册,输入输出各占用12个字节。之前在论坛找个说明文档分享给大家
 111报文.xlsx
111报文.xlsx
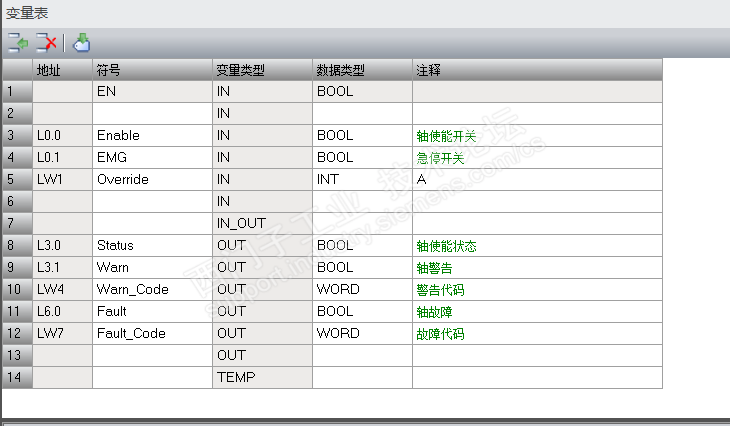
对于报文我的理解就是位置环在驱动器通过控制字来控制伺服,根据之前做完的组态为了方便写程序把I/O点的注释先写好。轴使能的控制主要是报文的第一字节,注意高低位的问题


新建个MC_POWER字程序,设置好输入输出参数。参考1200的工艺轴MC_Power子程序添加了一个急停按钮用于紧急停止。
下面开始写程序,首先一些基本状态字中数据链接到子程序的输出变量
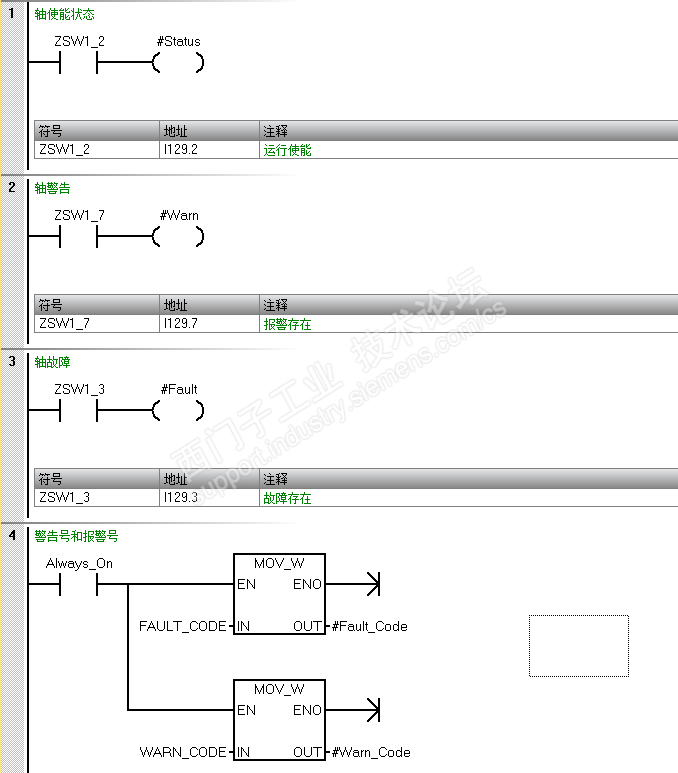
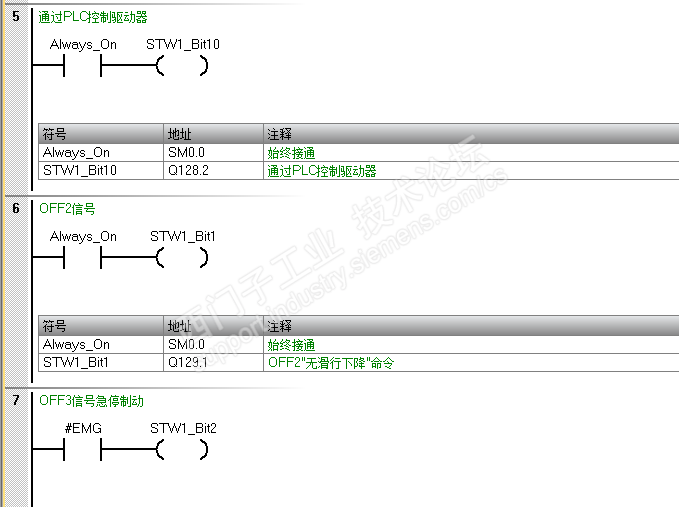
下面开始处理控制信号了,MC_Power主要需要处理OFF1,OFF2,OFF3和EP四个信号。根据说明OFF1是正常停车,OFF2是自由停车,OFF3是制动停车 EP是脉冲使能。
我的时序是这样的,首先置位STW1_Bit10这是PLC控制伺服前提条件。根据进给轴的应用不会需要OFF2自由停车方式。所以OFF2也是始终为True。OFF3是紧急停车方式由急停控制。
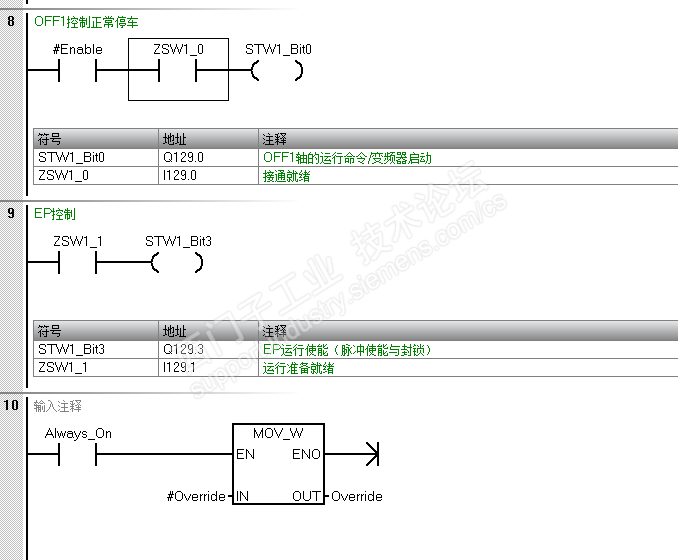
当OFF2,OFF3都为True时,接通就绪(ZSW1_0)信号就会生效,这时候就可以给OFF1信号了。OFF1信号给完且驱动器正常就会给出运行就绪信号(ZSW1_1),此时驱动器直流母线电压已载入。运行就绪(ZSW1_1)信号直接给出EP使能。运行使能(ZSW1_2)=TURE驱动器上电完成。
最后测试了一下轴使能能正常,观察通过OFF1停车的时候ZSW1_1直接关闭,运行就绪(ZSW1_1)延时关断了。这里面的延时时间不知道是如何处理的。花了一下午时间小目标算是完成了,对报文也算学习了点皮毛。如果你想更深入的了解下去你可能需要试着写完MC_Reset 、MC_Home MC_MoveAbsolute 、MC_MoveRelative 、MC_MoveVelocity 、MC_MoveJog…..
也许有人说了解那么多干嘛直接调用就行了。个人观点看你的应用吧,如果标准库刚好适合你你就用就行了。但是你想需要有些自己特殊的工艺处理那还得自己写。









 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国

 黄金
黄金


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐




















 短信登录
短信登录
