-------------------------------个人总结----------------------------------
把总结写在前面,老鸟们直接看总结可以交流指导,新手可以跳过看流程。
总体感觉SIMATIC S7-1200的PTO功能也只能说中规中矩,可能脉冲控制方式慢慢在被淘汰吧。以下总结了几点不知道我理解的对不对
1:PTO模式不能做闭环,不知道为啥不开放把编码器反馈接到PLC。这样脉冲控制步进驱动器+编码器反馈 的应用不能用了。
2:回原点触发信号和原点开关共用一个信号。无法用编码器的Z相脉冲,回原点精度会差一些。
3:回原点结束移动到偏移量的速度无法设置,走的是回原点的低速。所以偏移量不能太大,不然浪费时间太 长了。
4:软限位超程后需要轴复位,无法靠反方向移动自动复位错误。不是太方便,一般硬限位超程才需要复位。
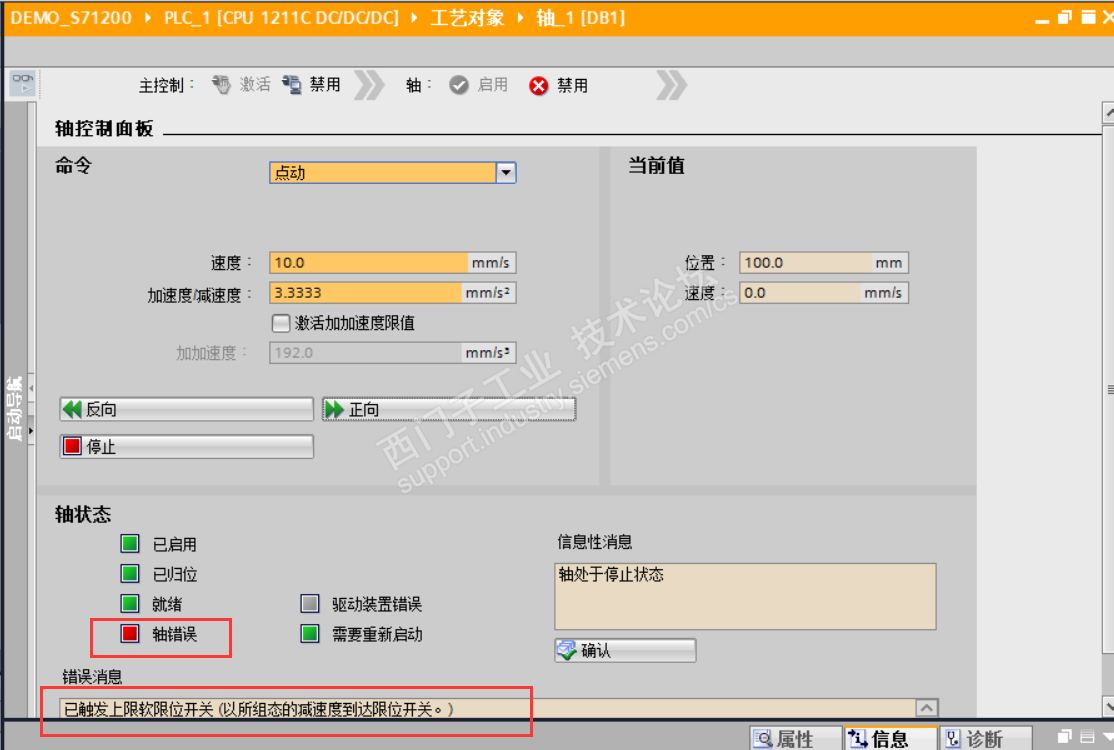
5:走相对或者绝对定位的指令的时候,启动前不检测是否超软限行程,傻傻的跑到超程位置才停。
------------------------------配置流程-----------------------------------
随着工艺要求的提高,现在越来越多应用都离不开运动控制了。作为新一代的控制器1200自然在这方面也很强大。PLC CPU就能支持PTO,模拟量和PRPFINET三种方式控制伺服驱动器做运动控制。今天先测试一下1200的PTO模式,PTO全拼Pulse Train Output,通俗点的讲就是PLC的输出点发脉冲信号给伺服驱动器或者步进驱动器来实现运动控制。
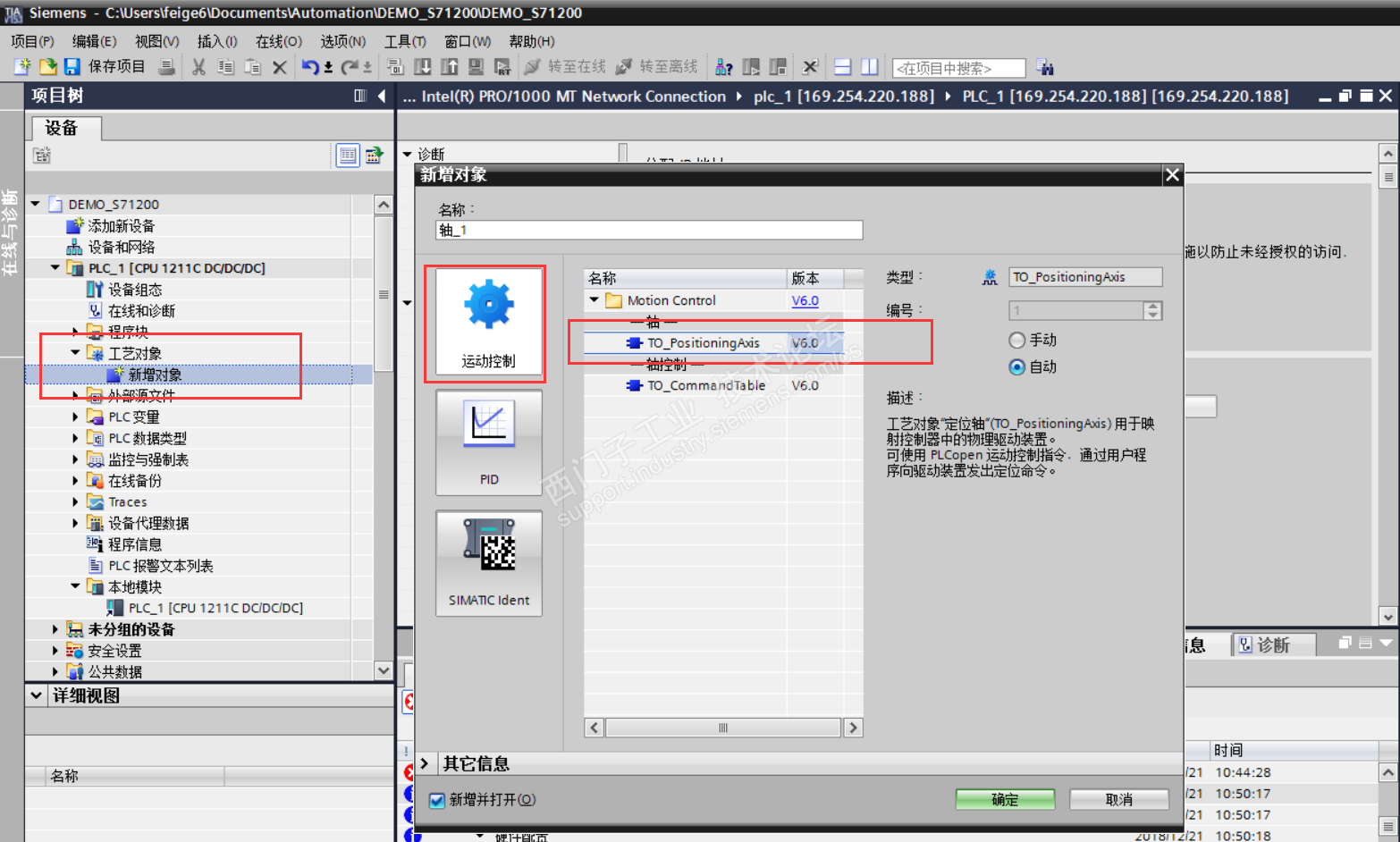
承接上次的项目,打开博途---工艺对象---新增工艺对象—运动控制—TO_PositioningAxis。右侧的编号就是生产的相关DB块的编号。可以是自动也可以是手动分配,我选了自动确定生产点击确定生产轴工艺模块
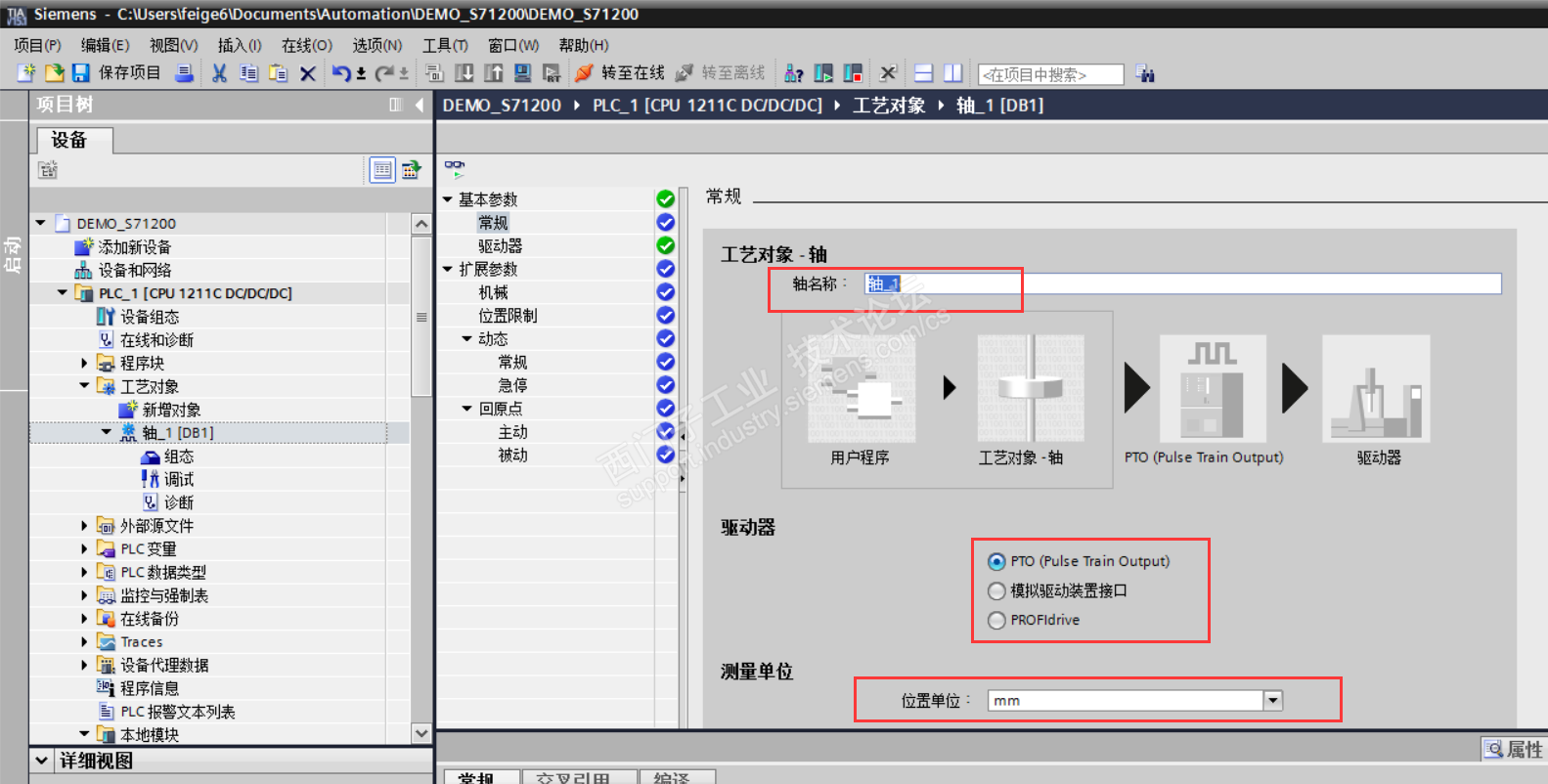
DB块生产后就可以开始配置参数了,常规参数---里面选择PTO模式。不知道大家有没有看轴名称下面那张图,图文并茂的解释了整个控制原理。用户程序(用户PLC程序)---控制工艺轴(其实读写DB块)---驱动器(PLC输出脉冲)---伺服电机带动传动机构实现运动控制。
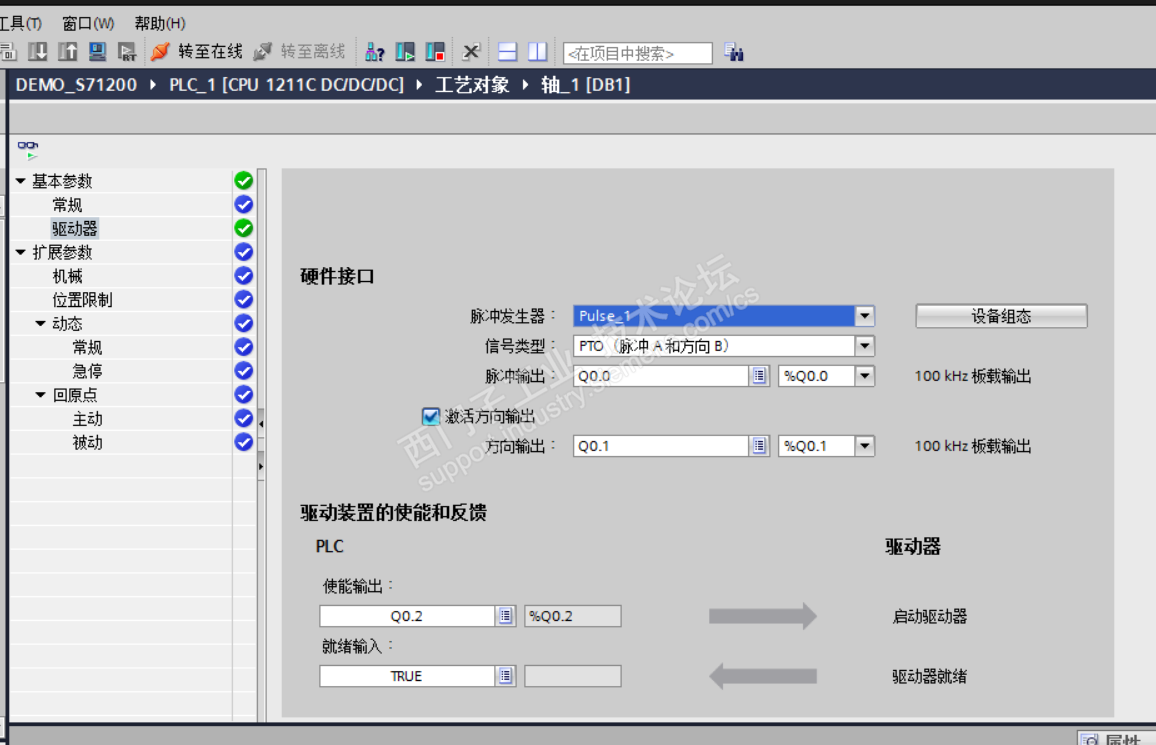
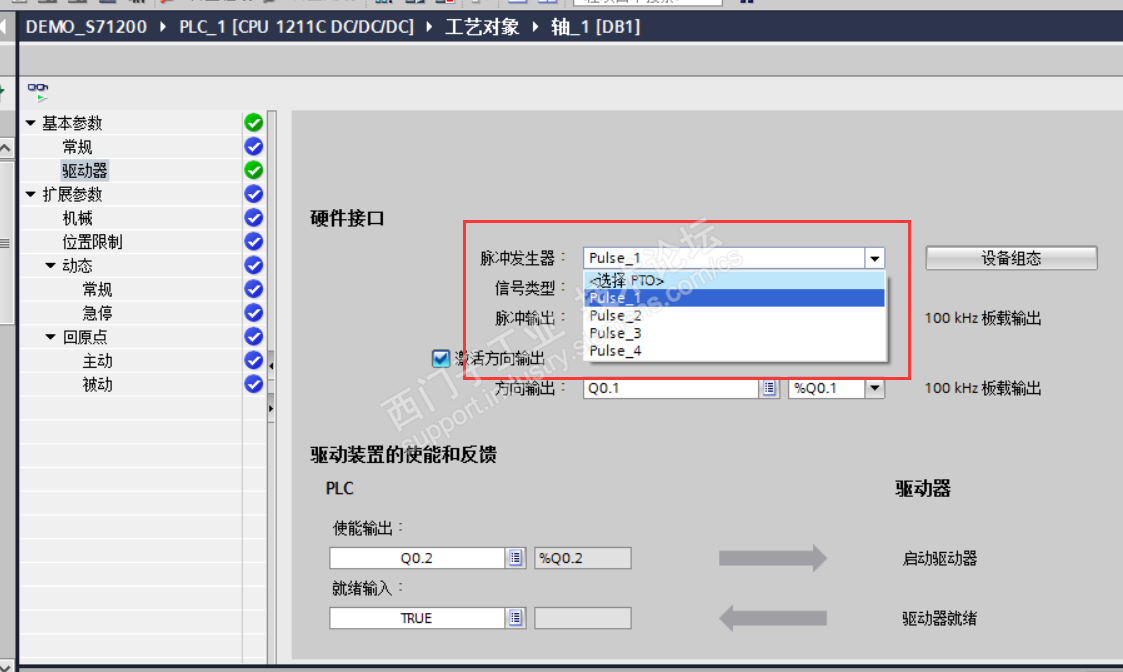
驱动器参数--其实就是控制驱动器相关参数。PTO方式设置与脉冲相关的参数。1200一共可以有4个脉冲发生器,脉冲类型可以选择脉冲+方向,正负脉冲,AB相,和AB相四倍频四种方式。下面还有和驱动器的I/O交换信号使能和驱动器就绪。

机械参数---设置每转脉冲数和每转位移量,这两个参数就决定脉冲当量即一个脉冲代表实际机构移动的量。这个参数修改后会影响其他的一些参数。所以首先要确定设置好这两个参数再设置下面的参数。同时根据脉冲当量还设置好伺服驱动器的电子齿轮比。

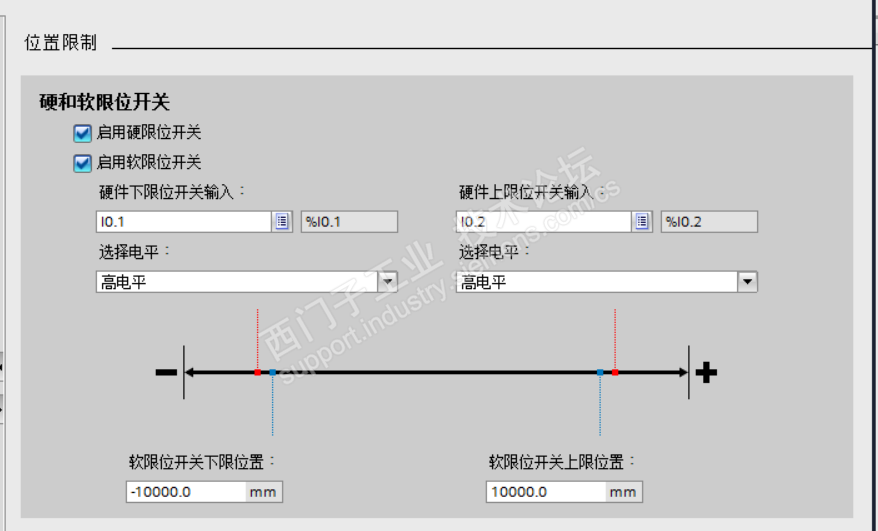
位置极限可以使用软限位和硬限位。软限位保护在硬限位行程之前,但是软限位需要在回原点完成后才才生效。
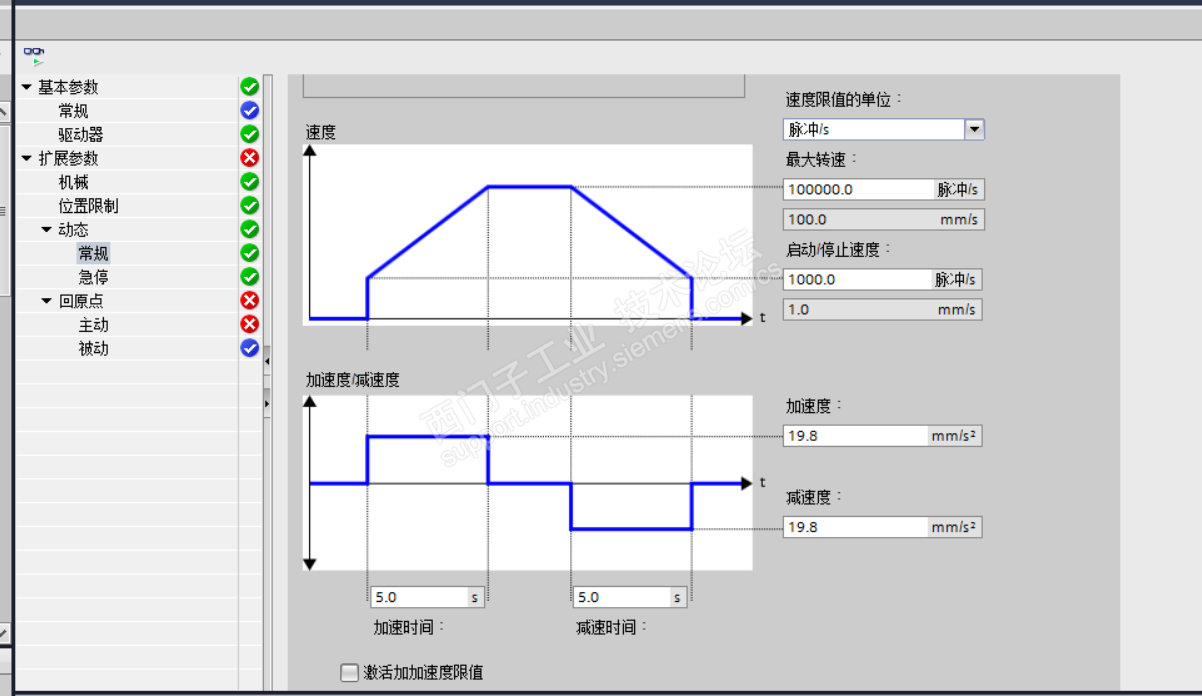
动态参数---动态参数就是根据PLC输出口的最大频率和机械结构的刚性来设置轴的最大速度,加减速和急停减速参数。其中最小速度为1脉冲/s。所以要结合你的最小速度来设置你的脉冲当量,比如我最小速度要0.1mm/s,那你的脉冲当量算下来需要0.1mm/脉冲。
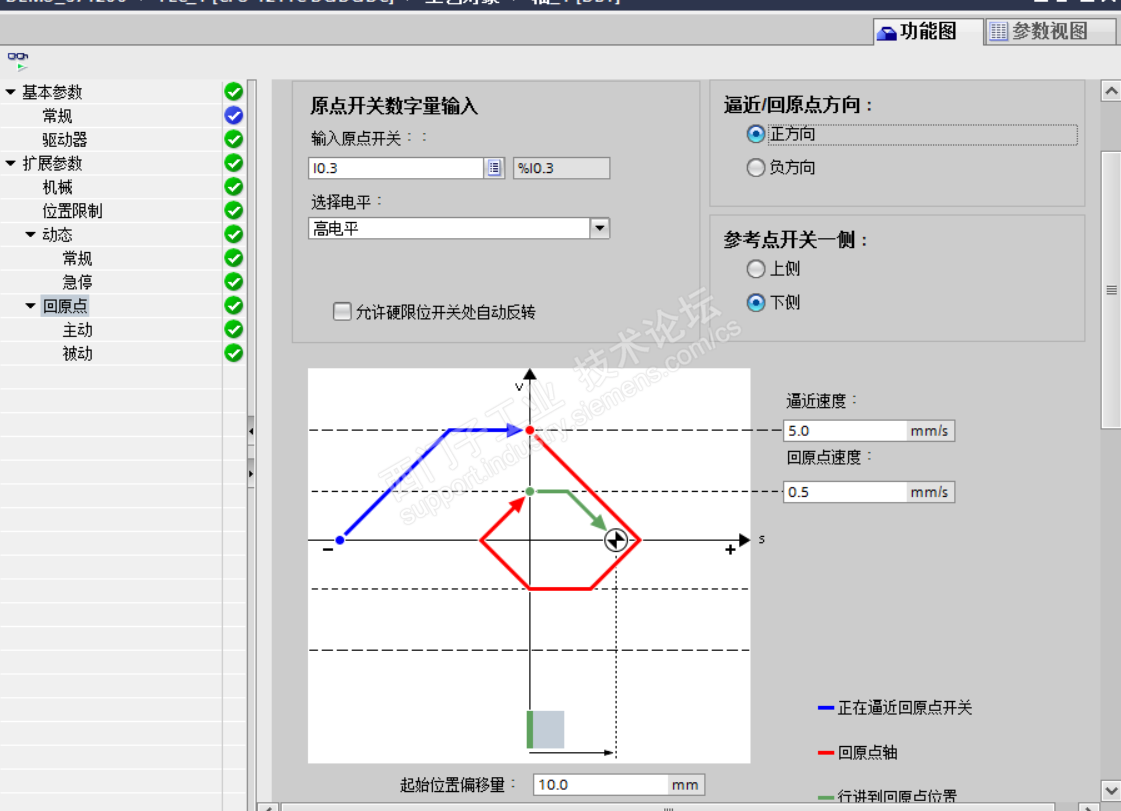
回原点设置,包括设置回原点开关地址及常开常闭类型,还支持碰到极限开关自动反向(这个功能挺好)
逼近/回原点方向:回原点启动后寻找原点开关的方向。
参考点开关一侧:其实就是是上升沿触发原点,还是下降沿触发。
逼近速度;开始找原点开关的速度(快速)。
回原点速度:找到原点开关后边沿触发原点位置的速度(低速)。
起始位置偏移量:开关触发回原点后偏移多少位置后设置为原点位置。
设置参数的时候根据参数的不同右下角的视图会随之改变,图形也准备的反应了回原点的整个流程:如下图:轴以5mm/s的速度向正方向寻找参考点,当触碰到参考点开关后,轴反向以0.5mm/s速度向负方向移动,当脱开开关后,轴再次反向以0.5mm/s向正方向移动。此时触碰到位置为原点,因为还有偏置量所以以0.5mm/s的速度移动10mm的偏移量设置当前位置为原点位置。
全部设置完没有错误就可以把程序下载到1200里面,然后就可以用控制面板调试了。这个调试面板还是挺方便的,功能也很齐全。
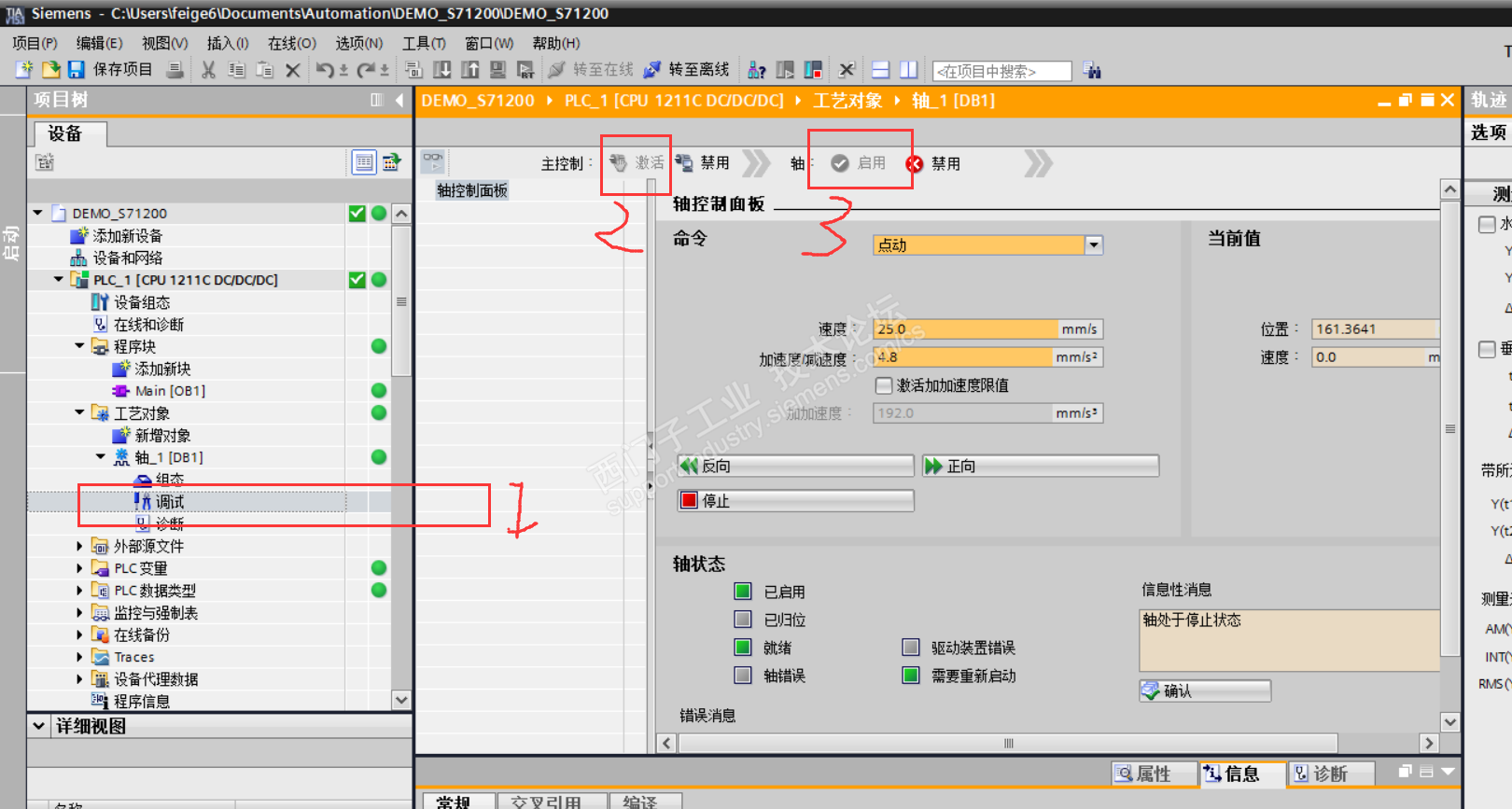
软限位生效和走绝对定位都需要在回原点成功后(从轴状态能监控的到),如果出现错误会有报警文本显示。

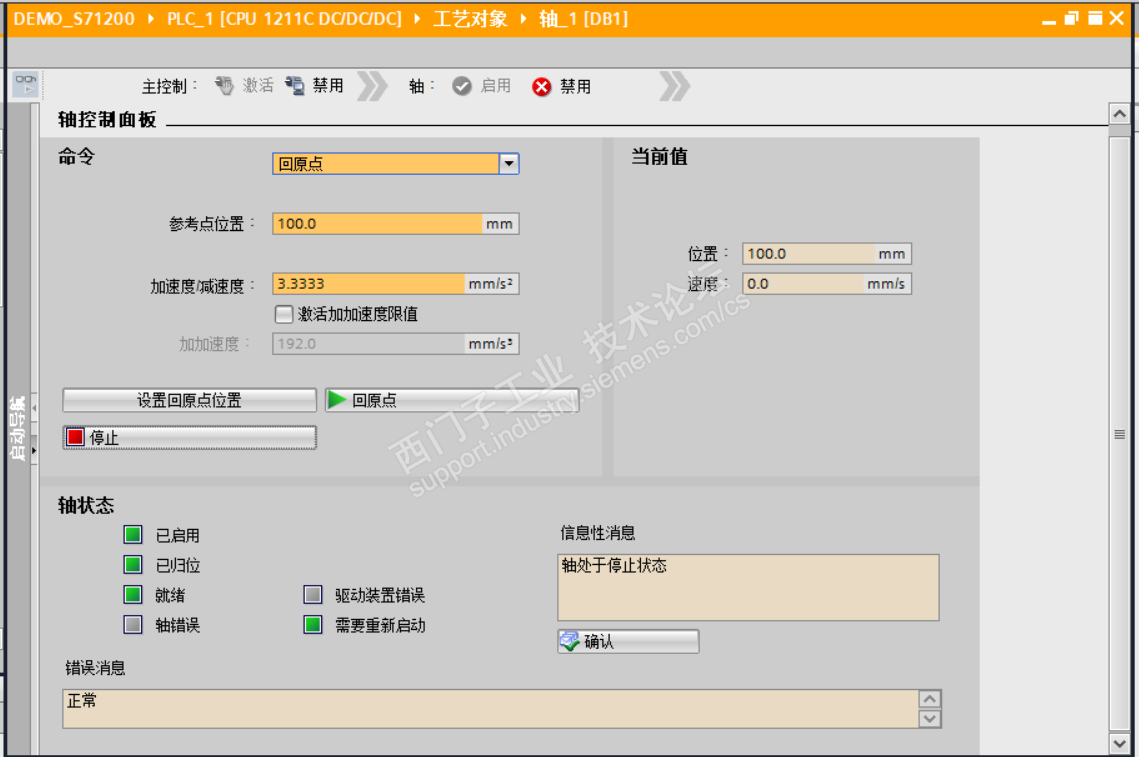
整个过程还是挺顺利的,这可能要归功于博途的功劳。每个设置参数都有很详细的解释。要看总结的请回到开头!









 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国

 黄金
黄金



 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐




















 短信登录
短信登录
