我之前见过飞剪定位的程序, 思路是对速度PI控制器, 做可变增益, 和可变积分时间;这里再说一下Simotion中WRF位置控制器的另一种另类思路:
SIMOTION的DCC库WRF定位器实用分析
如图。这是WRF结构图。
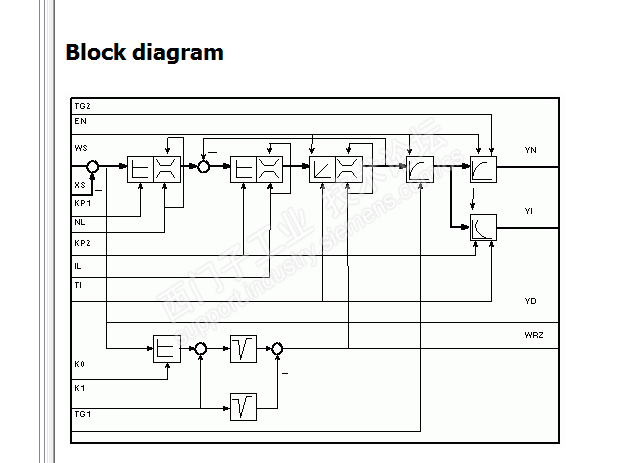
中板主轧机的轧辊定位使用时,因为KP1 = KP2 = 200.0, 所以输出的惯性跟随部分深度饱和, 仅受NL = 0.05的限幅控制;
此时, WRF控制器相当于下次Root控制器和NL = 0.05限幅串联起作用;
Root(开方)控制器, 可以表示为:
V = sqrt(K0 * err + K1) – sqrt(K1); 其中, K0 = 0.025, K1 = 0. 001;
当root控制器开始实际发挥作用是, v = 0.05;
此时可以计算出对应的偏差err = 0.226; 也就是偏差 = 0.226* 360 = 81.5°时, root开始退饱和发挥作用;
为了便于分析这个v和t的关系;进行时间反演, 从t = 0开始计算。 则Err可以表示为v(t)从0到t的积分;
即: v = sqrt(K0 * f(v, 0, t)) – sqrt(k1); f(v, 0, t)表示v(t)函数从0到t的积分;
解这个微分方程, 最后得到
t = 2*v / K0 + sqrt(K1)*log(v)/K0 + c; c是常数, log是自然对数ln.
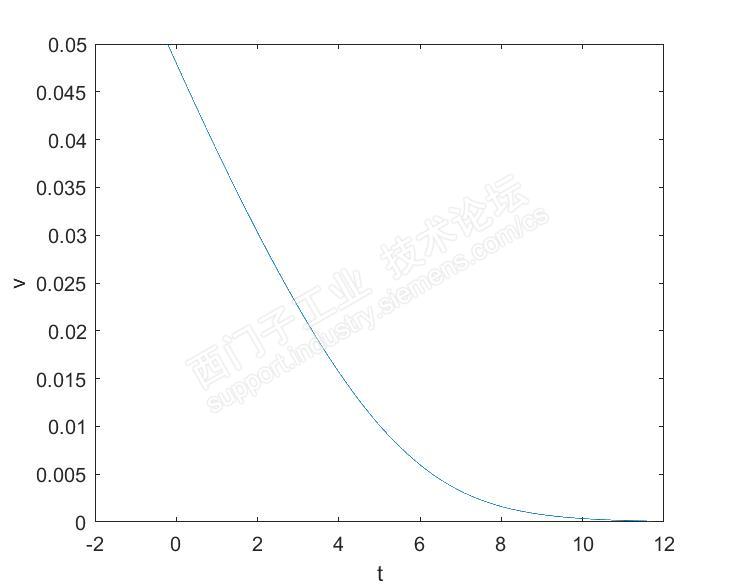
从这里可以看护, 当v比较大是, v,t的关系近似线性关系,充分发挥系统的减速性能;v趋于0时, v,t的关系近似一个衰减的指数,在最后阶段进行稳定控制;附加v,t的matlab曲线图;
总结: 可用这种root控制器处理定位控制。
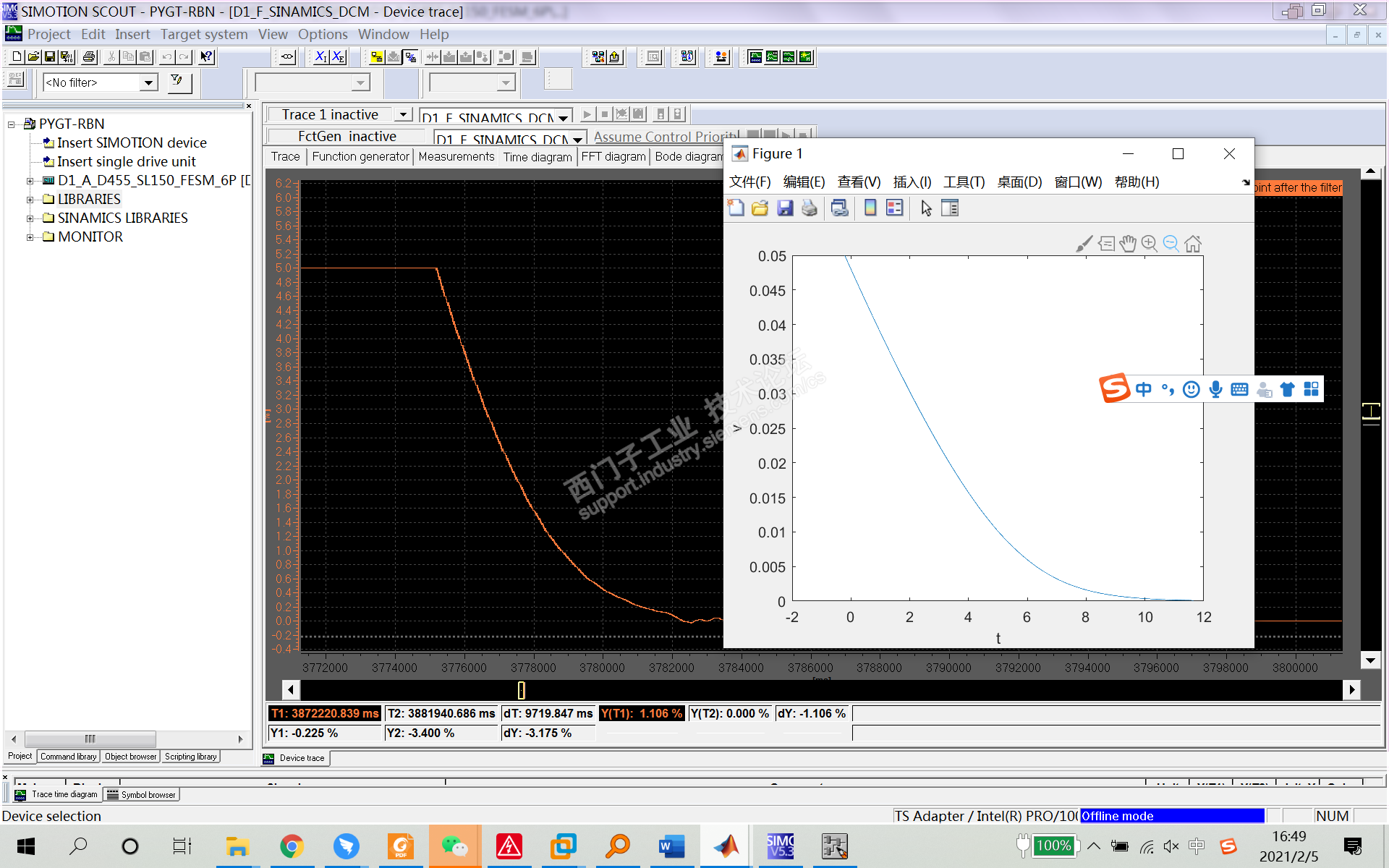
附:和实际速度曲线对比图









 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国

 钻石
钻石


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐



















 短信登录
短信登录
