最近在改造一台90年的德玛吉DMU60P,海德汉系统,飞利浦品牌主机。机床已经无法启动了,上电后操作系统丢失报警,从主机上看,硬盘插槽的电源指示灯不亮,找各种途径尝试维修,最终结论是无法修复。
公司决定用库里的840D系统进行改造,增加840D NUC单元,保留电源模块和驱动模块611D,增加6SN1118,操作面板,PLC模块等。
断断续续几星期后才送电开始调试,很快各进给轴和C轴都可以运行了,下一步全闭运行都没有问题。紧接着测试回参考点,由于之前吃过大亏,轴限位有效之前,回参考点是很危险的。必须谨慎操作,于是找各进给轴限位信号,想尽快处理验证一下,以免造成不必要的麻烦,但是从图纸上反反复复找也没找到限位信号及限位开关,于是打开机床防护罩继续找,还真没有!由于各进给轴和光栅尺都是增量的,通电之后参考点建立之前,软限位是无效的。这不奇怪了吗?这机器可是德国制造啊!依德国人严谨的做事风格,通电之后参考点建立之前,不可能没有安全措施,那么误操作只能撞机械缓冲装置,触发伺服报警吗?应该是不可能这么草率!
那么我就想有没有办法在没有硬件限位开关的情况下,能否实现硬件限位功能?经实践验证是可行的。
首先郑重声明以下几点:
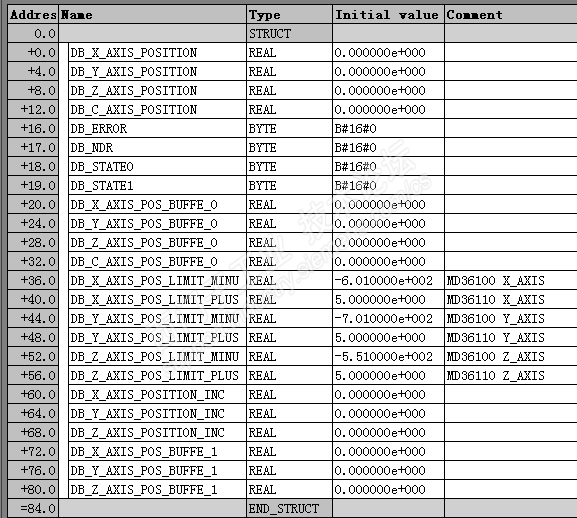
1. 首先各轴要准确无误建立一次参考点,以便PLC侧的DB数据块存储各轴的机械实际位置
2. 当调用的FB2输出报警时,此时DB数据块存储各轴的机械实际位置是错误的,要记录并响应,还需要设置超程解除机制,否则断电重启后,参考点无法建立
3. FB2是随PLC扫描周期触发的,再经过运算处理,触发硬件限位报警时会有延迟,导致轴会有一定的过冲量,比硬件限位触发报警时的过冲量稍大
4. 机械维修时,轴的实际位置发生改变后,超程解除后才能建立参考点
5. 其余还有不严谨的地方肯请坛友们批评指正,讨论。
大概思路如下,供大家参考:
1. 建立数据表
2. 利用NC变量选择器选择各轴的机械坐标变量
3. OB1中读取各轴的实际位置
AN M 0.0
= M 0.0
CALL "GET" , DB122
Req :=M0.0
NumVar :=3
Addr1 :="NCVAR".C1_SMA_actToolBasePos1_2.SYNTAX_ID
Unit1 :=B#16#1
Column1:=
Line1 :=
Addr2 :="NCVAR".C1_SMA_actToolBasePos2_2.SYNTAX_ID
Unit2 :=
Column2:=
Line2 :=
Addr3 :="NCVAR".C1_SMA_actToolBasePos3_2.SYNTAX_ID
Unit3 :=
Column3:=
Line3 :=
Addr4 :=
Unit4 :=
Column4:=
Line4 :=
Addr5 :=
Unit5 :=
Column5:=
Line5 :=
Addr6 :=
Unit6 :=
Column6:=
Line6 :=
Addr7 :=
Unit7 :=
Column7:=
Line7 :=
Addr8 :=
Unit8 :=
Column8:=
Line8 :=
Error :=DB110.DBX16.0
NDR :=DB110.DBX17.0
State :=DB110.DBW18
RD1 :="AXIS POSITION".DB_X_AXIS_POSITION
RD2 :="AXIS POSITION".DB_Y_AXIS_POSITION
RD3 :="AXIS POSITION".DB_Z_AXIS_POSITION
RD4 :=
RD5 :=
RD6 :=
RD7 :=
RD8 :=
4. 参考点建立之后位置更新
A "X_AIXS".E_RefSyn2
FP M 10.0
= L 0.0
A L 0.0
JNB _007
L 0.000000e+000
T "AXIS POSITION".DB_X_AXIS_POS_BUFFE_0
_007: NOP 0
A L 0.0
JNB _008
L 0.000000e+000
T "AXIS POSITION".DB_X_AXIS_POSITION_INC
_008: NOP 0
6. 轴限位报警
L "AXIS POSITION".DB_X_AXIS_POSITION
L "AXIS POSITION".DB_X_AXIS_POS_BUFFE_0
+R
T "AXIS POSITION".DB_X_AXIS_POSITION_INC
L "AXIS POSITION".DB_X_AXIS_POSITION_INC
L "AXIS POSITION".DB_X_AXIS_POS_LIMIT_MINU
>R
NOT
A I 2.0
= "X_AIXS".A_HWLimitMinus
L "AXIS POSITION".DB_X_AXIS_POSITION_INC
L "AXIS POSITION".DB_X_AXIS_POS_LIMIT_PLUS
<R
NOT
A I 2.0
= "X_AIXS".A_HWLimitPlus
7. OB100中刷新断电前轴实际位置
L "AXIS POSITION".DB_X_AXIS_POSITION_INC
T "AXIS POSITION".DB_X_AXIS_POS_BUFFE_0









 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国

 黄金
黄金


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐



















 短信登录
短信登录
