关于位置环增益与跟随误,看似简单,就下面这个公式:

但多问几个问题时,好像又不太容易说清楚,今天用几个实验说明下个人学习后的理解。
问题1:上面公式对吗?
设置X轴的位置环增益为1(即MD32200 $MA_POSCTRL_GAIN=1)
然后,我们编写一段NC程序:
G01 X1000 F1000
M02
切换到系统诊断画面下,查看X轴的跟随误差(按键顺序:诊断à轴诊断à轴信息)来验证下。
按NC启动键,运行上面的程序,我们可以看到X轴的跟随误差(橙色框标出),这里紫色框标出了增益系数,数值是1,和MD32200设置的数据一样。但注意这个“增益系数”后面跟了个“(计算出的值)”,因此,它并不是MD32200,而是根据上面的公式计算出来的数值,公式里分子是速度,分母是跟随误差,当跟随误差减小时,这个计算出来的增益值就大,什么情况下跟随误差会减小?
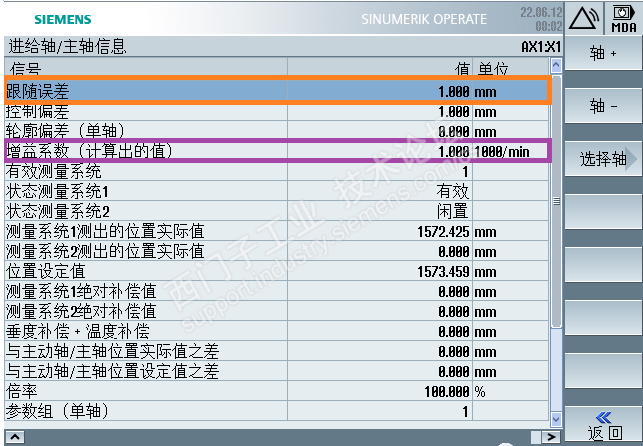
按公式计算的跟随误差=(1m/min) / (1)= 1mm,公式没错
问题2:参与插补的轴的位置环为什么必须相同?
学习了位置环增益是如何计算的,我们必然会想到一个大家都承认的一个结论“参与插补的轴的位置环增益必须数值必须相同”,对吗?试试就知道了。
设置:
X轴的位置环增益为1(即MD32200 $MA_POSCTRL_GAIN=1)
Y轴的位置环增益为2(即MD32200 $MA_POSCTRL_GAIN=2)
然后,进行圆测试

设置:
X轴的位置环增益为1(即MD32200 $MA_POSCTRL_GAIN=1)
Y轴的位置环增益为1(即MD32200 $MA_POSCTRL_GAIN=1)
然后,进行圆测试
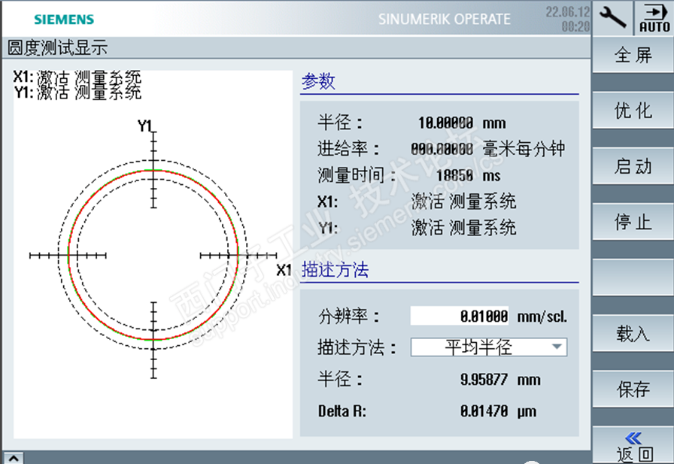
比较两个圆测试的结果,结论显而易见,参与插补的轴的增益如果不同,则插补出的轮廓会有很大的偏差。
问题3:那如果两根轴的增益不同,若指令是沿45度的方向从A点到B点,会是什么结果呢?终点位置不对?角度不是45度?…
同样,有了疑问就想办法去验证。执行下面程序:
G01 X1000 Y1000 F1000
M02
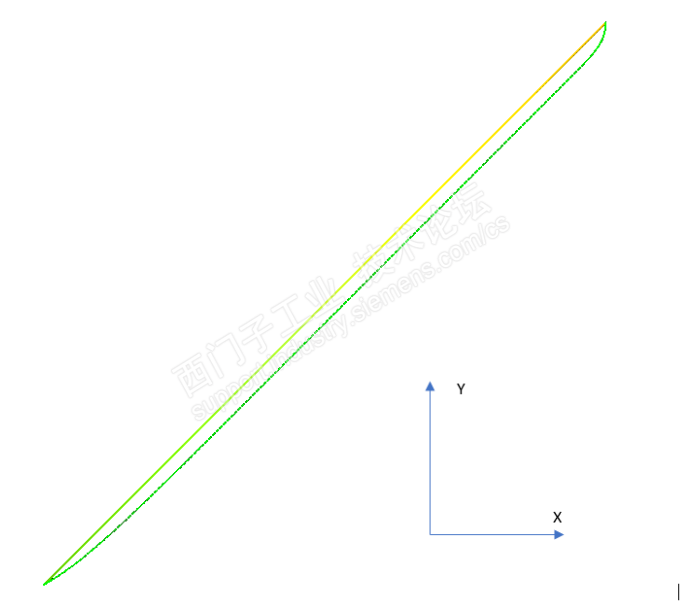
用伺服跟踪功能,记录整个运动过程(记录X轴和Y轴的位置值),得到结果如下:
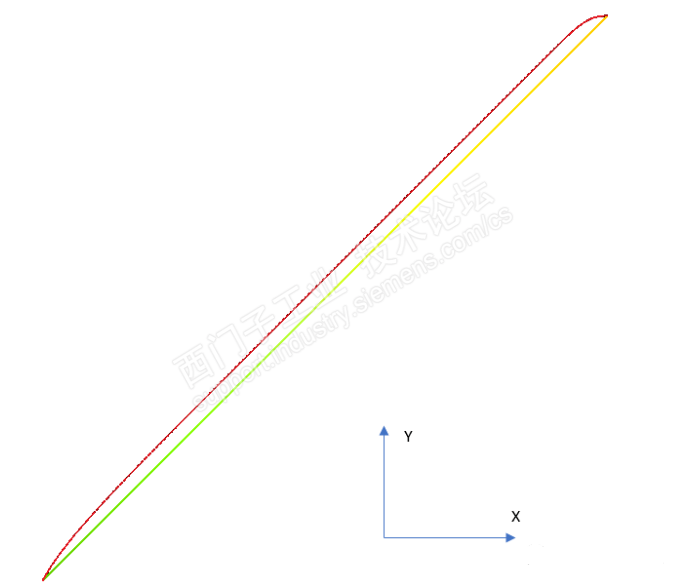
红色是X轴与Y轴增益不同时走的45度斜线(X轴的位置环增益为1,Y轴的位置环增益为2);绿色是X轴与Y轴增益相同时走的45度斜线(X轴的位置环增益为1,Y轴的位置环增益为1)。为方便比较,认为将两次记录结果叠加在一起。对比后,可以得到如下结论:
1.即使插补的两轴增益不同,终点位置不受影响,即可以做定位运动
2.增益不同的两轴做插补,会产生轮廓偏差
上图可以看出,X轴滞后,怎么看出来的呢?
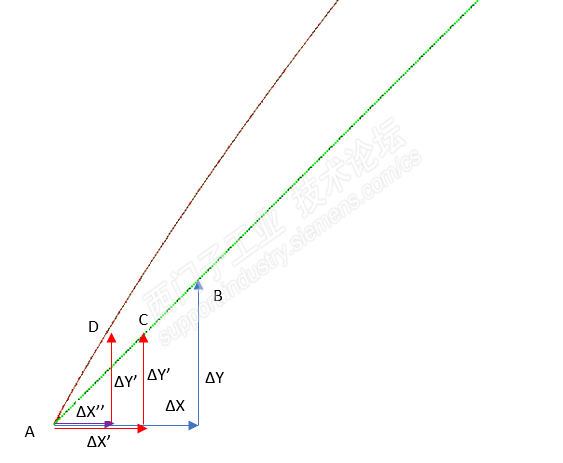
从上图看,X轴与Y轴要从A点插补到B点,某一时刻,理论上X移动距离是ΔX,Y移动距离是ΔY,但由于我们的位置控制器是反馈系统,因此存在滞后,就是我们说的跟随误差,那么,实际情况是:
如果X轴和Y轴的增益相同,那么跟随误差也相同,也就是说两根轴少走了同样的距离,比如X轴移动了ΔX’,Y轴移动了ΔY’,虽然没有到达目标点B,但是终点C也在45度的编程轮廓上。
如果X轴和Y轴的增益不同,X轴增益小,Y轴增益大,根据公式我们知道,X轴的跟随误差就比Y轴的跟随误差大,因此,实际X轴的移动距离是ΔX’’,而Y保持ΔY’,这样插补后的终点是D而不是C,偏离了编程轮廓。
同样,如果设置改为X轴的位置环增益为2,Y轴的位置环增益为1)
得到的结果如下图绿色曲线,这是Y轴滞后的实际插补轨迹
以上,介绍了下对位置环增益与跟随误差的粗浅认识。









 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国

 普通
普通


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐



















 短信登录
短信登录
