本来这类的帖子发的很多了。都不想再重复了。可是昨天看了一下这个新调试的传动系统。实在是想炫一炫。自我感觉特别好的那种。
本传动系统是一台小功率的发动机台架性能试验设备。3kW,两极三相异步电机。额定转速:2910rpm;额定转矩:10N.m;最高转速:12000rpm。电机选用的是ABB国内工厂制造。控制装置:G120-CU240E-2PN-PM240-2;3kW重载型。控制方式:SLVC。控制功能,恒转速控制,恒转矩(闭环)控制,恒电流控制,电动允许/禁止任意转换;负载接通/断开任意转换。
主机如下图示:

3kW的2极异步电机,最高转速运行12000rpm,相当于G120的SLVC最高运行频率200Hz,所以对原厂电机的轴承和转子动平衡都是要考虑并且做些工作的。另外,电机轴安装转速测量码盘传感器,电机外壳安装平衡式转矩检测传感器。
控制系统如下图示:
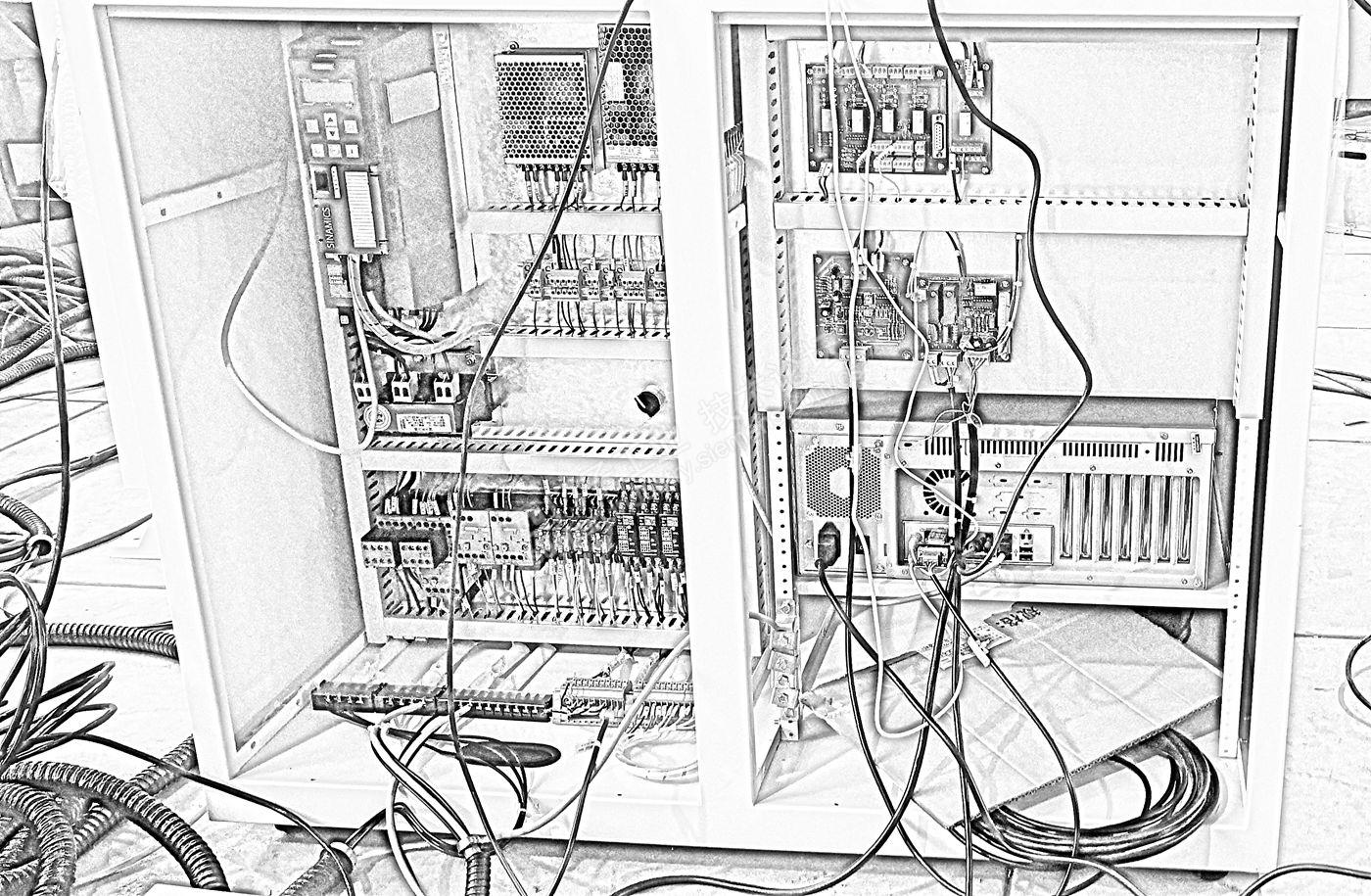
采用G120的CU240E-2PN主要是需要,第一,变频器与上位的通讯采用PN通讯。提高其通讯的安全可靠性;第二,可以接收现场的电机轴安装的码盘转速信号。作为电机实际转速的测量和监控。电机轴扭矩检测传感器信号通过G120的模拟量输入接口,接收实时的扭矩检测信号,作为其闭环控制的实际值和监控值。
操作台如下图示:

操作台是由工控计算机作为上位机系统,直接与G120进行PN通讯。该系统没有PLC作为中间的控制环节。操作环境是自己开发的VB.net操作界面。
该系统还有其他的环节,比如,发动机的油门控制,发动机的油耗测试,以及现场环境状态的检测与监控。这里从略。仅对与G120的调试有关的信息加以分享。
调试:我最近在曾经发过一个自己编的关于调试G120的步骤。
详情见帖子的39楼
就是根据上述的调试流程,快速调试以后,手动修改了P342,根据那个最佳对称法的公式,手动修改P1472;P1496。然后trace录波验证。先来一个0-3000rpm加减速状态。如下:


上图一个是设定值坐标系,一个是实际值坐标系。两个坐标系是重叠的,两条曲线也是重叠的。很ok呀。
于是再录一个0-9000rpm加减状态
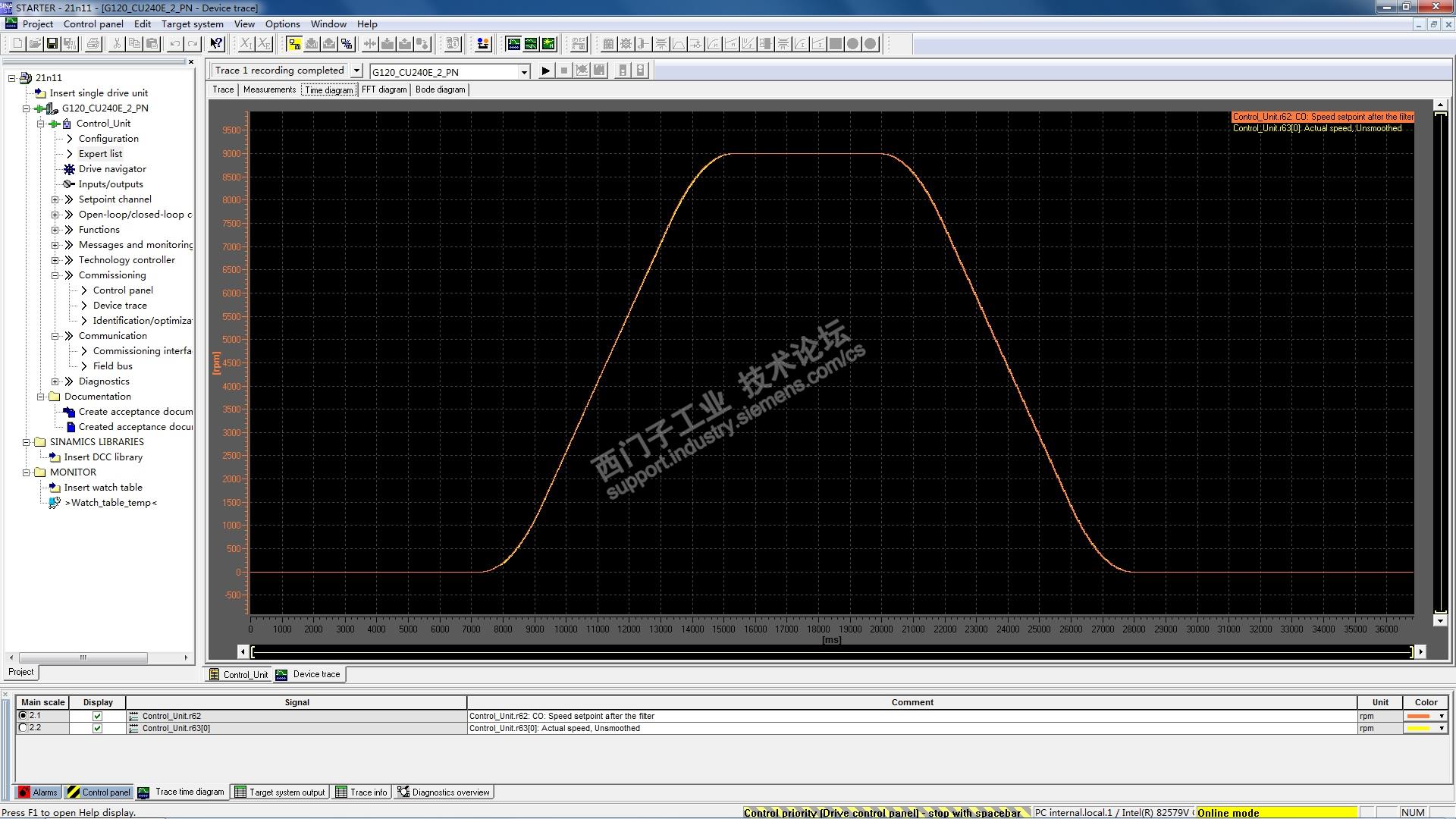

和0-3000rpm的加减速过程一样,设定值与实际值两个坐标是重叠的,两条曲线也是重叠的。
综上,从录波状态检验调试结果。非常满意。系统的运行状态,不论是设定值还是实际值,不论是静态还是动态,都是无可挑剔了。特别是,曲线如此的干净,没有噪声。EMC在此完美无瑕。
G120,看把它能的。...。









 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国

 钻石
钻石



 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐



















 短信登录
短信登录
