
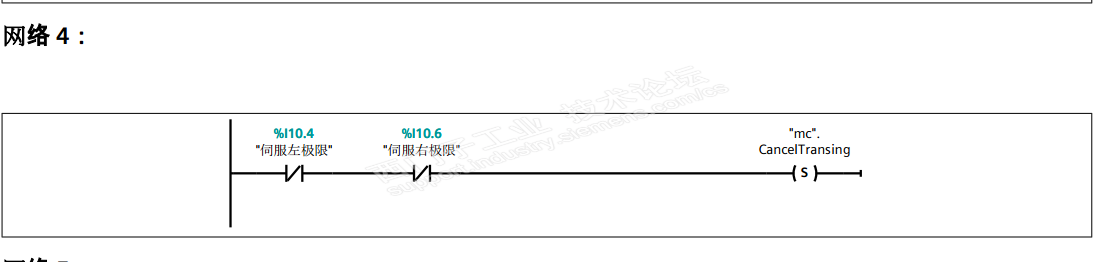


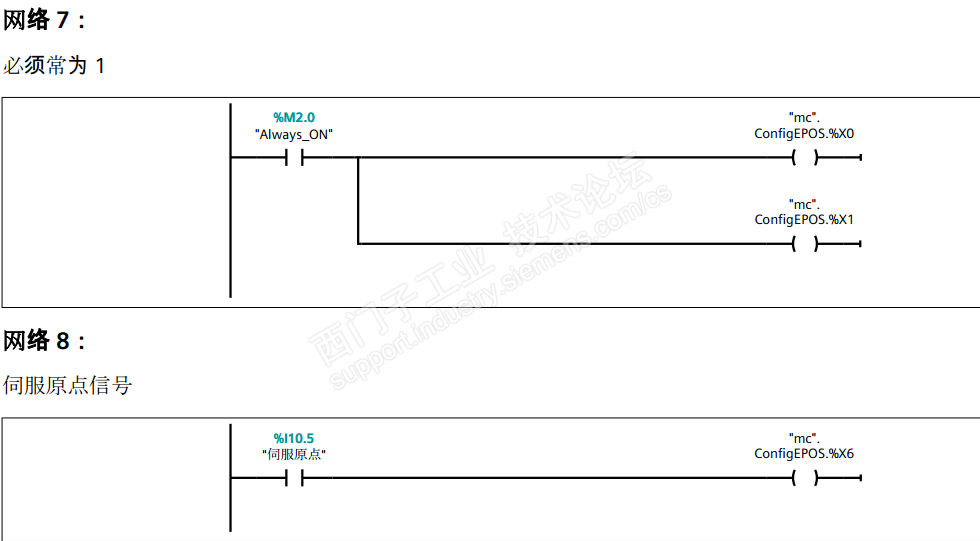






以上程序实现故障复位,原点回归和绝对定位功能。伺服驱动器需要设置为EPOS控制,报文为111.根据需要设置好伺服其它参数。
此程序以上只是伺服的运动方式的切换部份,速度和位置传送部分另外的子程序,不过就是随工艺更改的值传送到FB284的位置和速度输入引脚而已,就不贴出来了。工艺要求是进行绝对定位的时候的目标位置值和实时的速度值都需要随时改变。也就是伺服在往目标位置运行时,更改了下个位置,伺服立即响应执行下一个目标,伺服往目标位置运行的速度也是一旦需要改变,立即执行新的速度值往目标速度,而不是走完当前目标值再必变位置和速度,也就是实现西门子所说的超驰。
其实实时改变速度,可以把config.x8置1就可以









 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国

 黄金
黄金



 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐



















 短信登录
短信登录
