签到有奖
消息提醒
运维工程师专区
官方商城
点击复制链接
关注该帖后,有多人参加探讨会对您通知与提示!
帖子
精华
被关注
论坛等级:侠士
注册时间:2013-06-07
白金 如何晋级?
4105
18
2018-11-09 17:55:18
1200/1500(T)运动控制中PTO模式只能开环,模拟量闭环或者PN。
PTO闭环至今官方无解,PN也不多说了。
在搭配非西家伺服,模拟量闭环如果没有编码器,或者编码器不匹配,只有位移传感器(或其他模拟量传感器),如何闭环?
当然失败了,不想浪费时间的不用往下看。
看到一个官方实例https://support.industry.siemens.com/cs/document/109741575/%E4%BD%BF%E7%94%A8-mc-preservo-%E5%92%8C-mc-postservo-%E7%BB%84%E7%BB%87%E5%9D%97?dti=0&lc=zh-CN
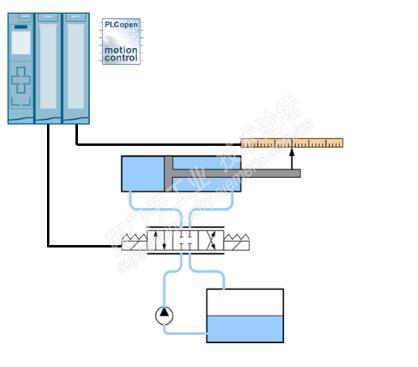
直接用运动指令去控制比例阀+位移传感器。
方案为:
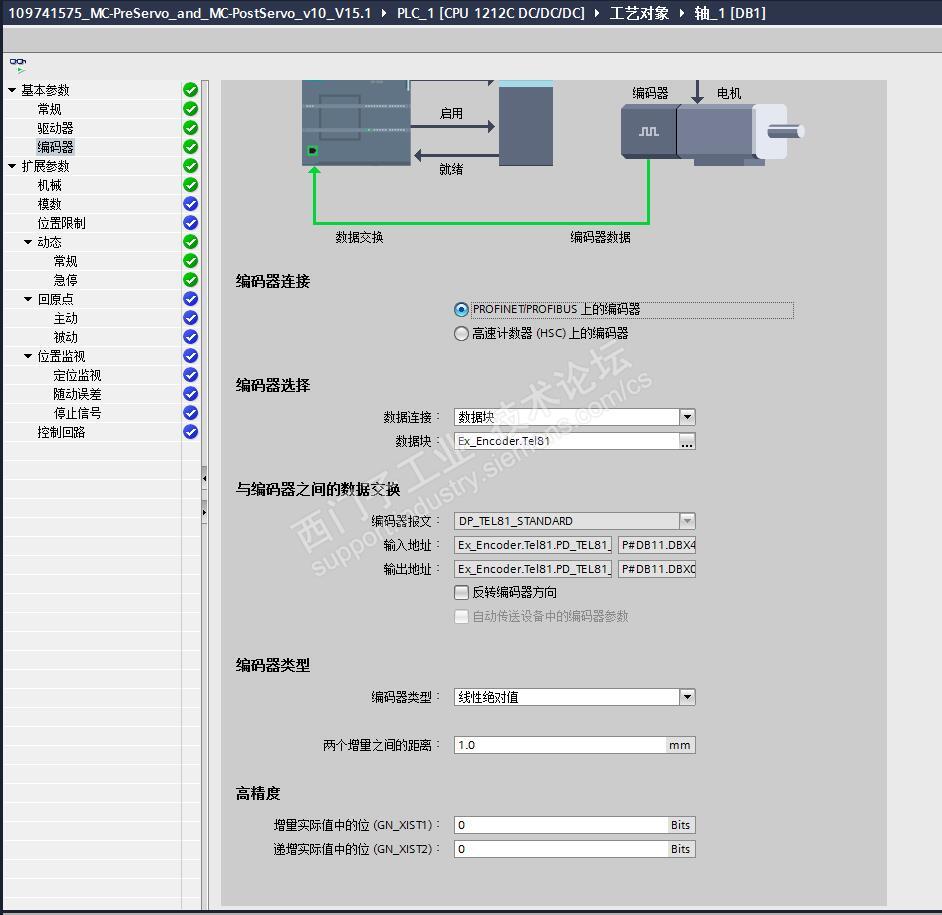
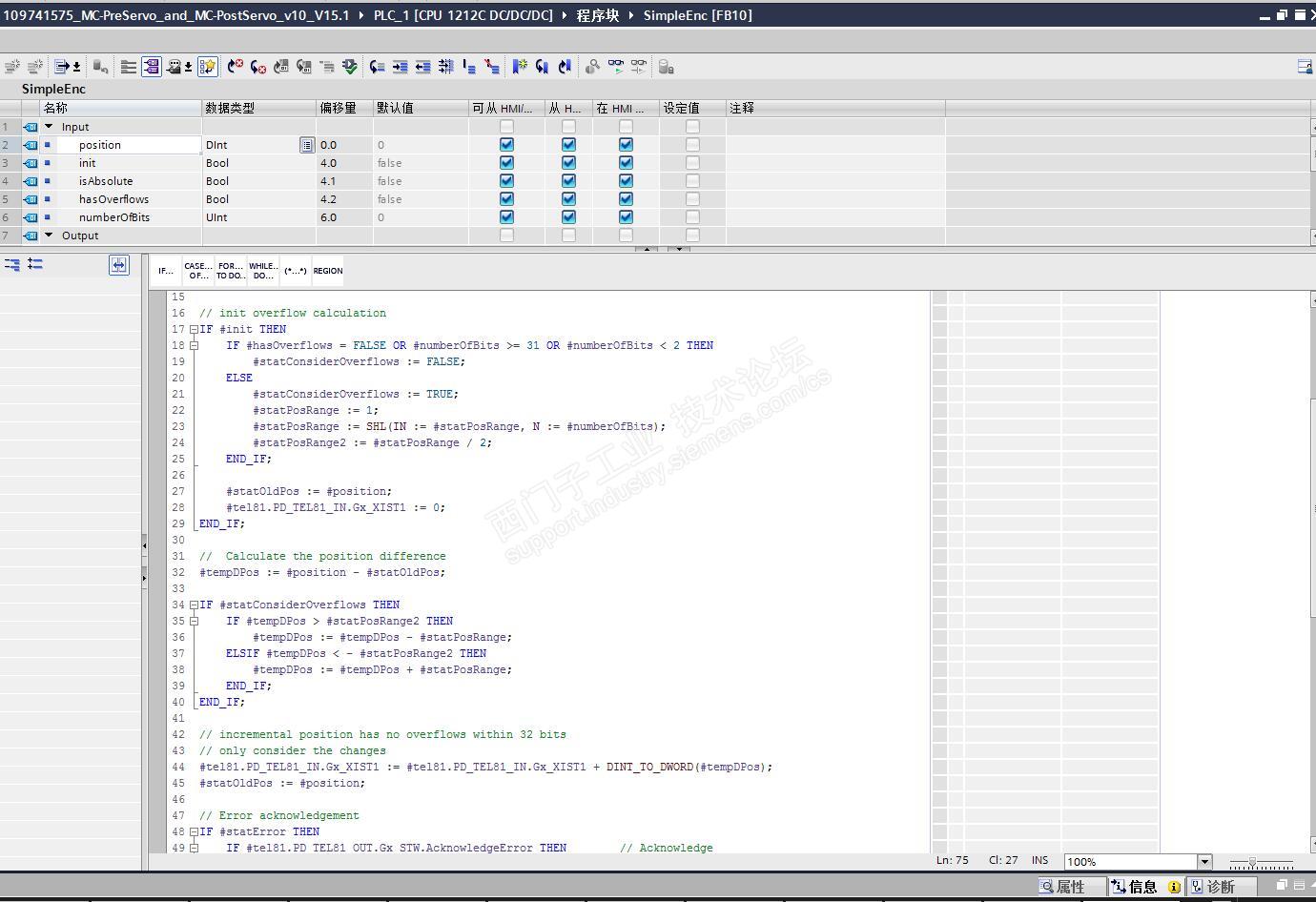
1,MC-PreServo中将模拟量IW模拟成编码器报文81。
2,MC-PostServo中针对液压阀的非线***调整设定值,其实就是对运动指令的输出做了一下分段缩放,然后通过QW输出。这个用的是现成LGF中的一个库。
就想,能否套用一下,变成1200+第三方伺服+位移传感器。因为伺服不像液压,伺服是线性的,步骤2就不需要了。正好手边有一个1212DC。
1,工艺轴,模拟量输出
2,编码器用数据块模拟出来
3,MC-PreServo中复制官方实例IW的处理程序。
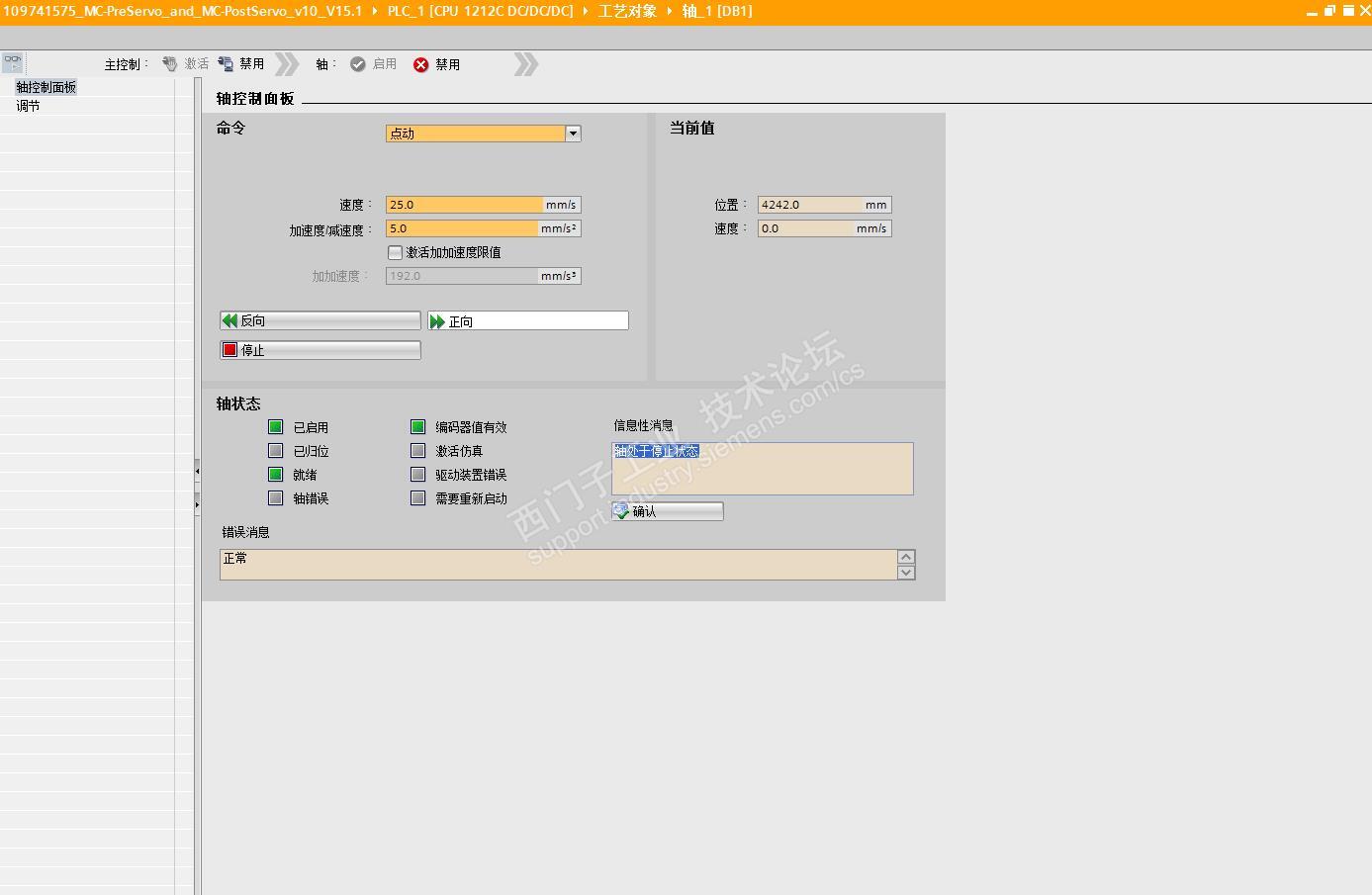
4,手边没有伺服和位移传感器先,下载到PLC试一下。
随便弄了一个电压接进PLC,可以看到模拟出编码器的位置了。
存在问题:
1,原实例中用的是HS型模拟模块,这些模块1200中是没有的。模拟量采集时静态时也有波动,导致编码器位置一直在跳。
2,因为没有实际的执行和反馈原件,导致一给定速度就报错了(误差过大)。
最终还是失败的。
这种方式不如直接PID更加暴力简单吗?那么官方实例用运动指令的意义何在?
期待大神。
剩余80%未阅读, 请登录阅读
请填写推广理由:
【仅剩99份】学PLC得PLC限量学习笔记,下单立减50元享加赠
助你技有所长,论有所获
首次发帖探讨工控技术话题 立获新人礼包,100中奖哦! (包含周边、书籍、兑奖西币)
共有13021条技术帖
恭喜,你发布的帖子
快扫描右侧二维码晒一晒吧!
再发帖或跟帖交流2条,就能晋升VIP啦!开启更多专属权限!
分享
只看 楼主
欢迎您访问支持中心!
丰富的视频,全方位的文档,大量的网友交流精华……
为了更好的完善这些内容,我们诚邀您在浏览结束后,花20秒左右的时间,完成一个用户在线调查!
感谢您的支持!
密码至少8位,包含大、小写字母,数字和符号至少三种。
允许邮箱和手机接收来自支持中心网站的信息
我已同意《支持中心网站注册协议和隐私政策》
微信登录扫码一键登录
验证码登录
密码登录
二维码失效点击重试
打开微信扫一扫,快速登录/注册
未注册手机验证后自动登录,注册即代表同意《支持中心网站注册协议和隐私政策》
三日内免验证登录
短信登录
登录









 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国

 白金
白金




 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐



















 短信登录
短信登录
