一、SINAMICS驱动器的EPOS功能
EPOS(基本位置控制)是位置环在驱动器侧,由驱动器自身完成位置闭环控制的功能。SINAMICS驱动器里S系列(S110、S120)以及V90PN都内置了此功能,而G120系列中CU250S-2需要通过购买授权和CF卡方式获得该功能。

图1:西门子驱动器EPOS功能
基本定位器功能包括以下几个模式:
(1) 设定值直接给定/MDI
(2) 运行程序段
(3) 回参考点
(4) 点动
(5) 运行到固定挡块
二、TIA Portal 驱动库程序
FB284属于TIA Portal提供的驱动库程序,用于基于博途编程环境的S7-1200、S7-1500、S7-300/400等SIMATIC控制器对G/S120、V90等SINAMICS驱动器的基本定位控制。目前博途驱动库主要包含以下三种类型的功能块:

图2:博途常用驱动库
上面提到了循环和非循环数据交换,在功能块里是如何实现的?实际上FB284/FB285用到了DPRD/DAT和DPWR_DAT指令,即“读取标准DP从站的一致性数据”,而FB286/287则使用了RDREC指令和WRREC指令,如图3所示。
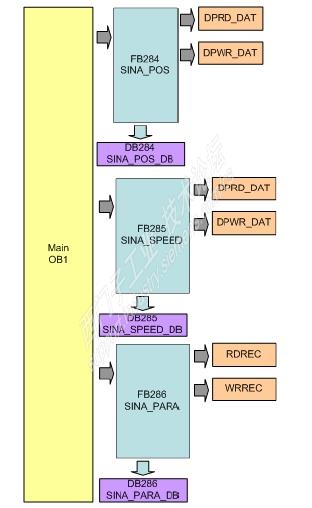
图3:博途驱动库调用原理
说明一下:
(1)博途DPWD/DAT和DPWR_DAT指令前身其实就是经典STEP7 V5里的SFC14和SFC15。大家用DP通信控制变频器等应该都用过,在PROFIBUS或PROFINET网络中主站读取或者写入从站(大于4个字节)连续的数据需要使用 SFC14/SFC15,当然也有个别CPU型号可以不需要。
(2)博途RDREC和WRREC指令前身则是经典STEP7 V5里的SFC58和SFC59。
三、FB284的实现过程(以V90PN为例)
如上所述FB284库实际上就是通过一致性读写指令去对111报文的IO进行操作,下面我们自己做一个简单的FB来实现FB284基本功能,主要给大家分析如何对报文操作。
1、111报文
因为是操作111报文,所以我们首先需要了解该报文的详细信息,111报文是带扩展功能定位运行报文,常用于EPOS的控制。111报文在通信组态时映射的IO地址如图4所示,我们实际上就是对此IO的操作,可以看到111报文是12个接受/发送字,每个控制/状态字的含义可以查找V90或G120/S120手册。

图4:111报文映射IO地址
2. FB284管脚、111报文、EPOS功能间的对应关系,如图5/6所示。
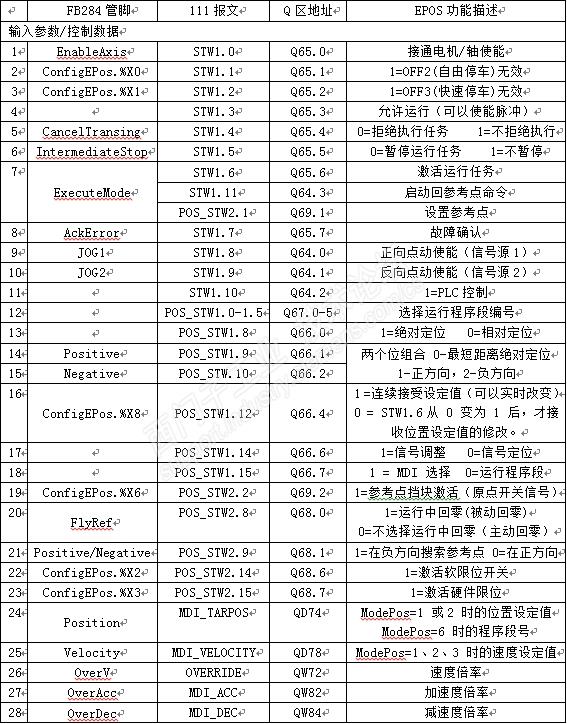
图5:控制输出对应关系
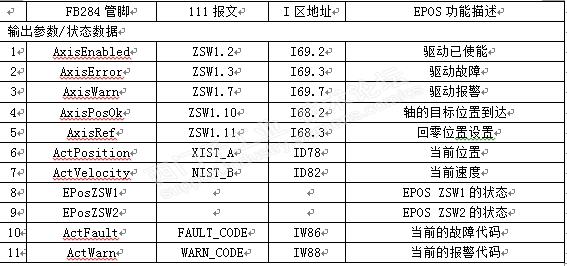 图6:状态反馈对应关系
图6:状态反馈对应关系
3.EPOS各功能配合111报文控制V90PN的具体步骤
(1)一致性读写
前面说过通过DPWD/DAT和DPWR_DAT指令实现,如图7所示。
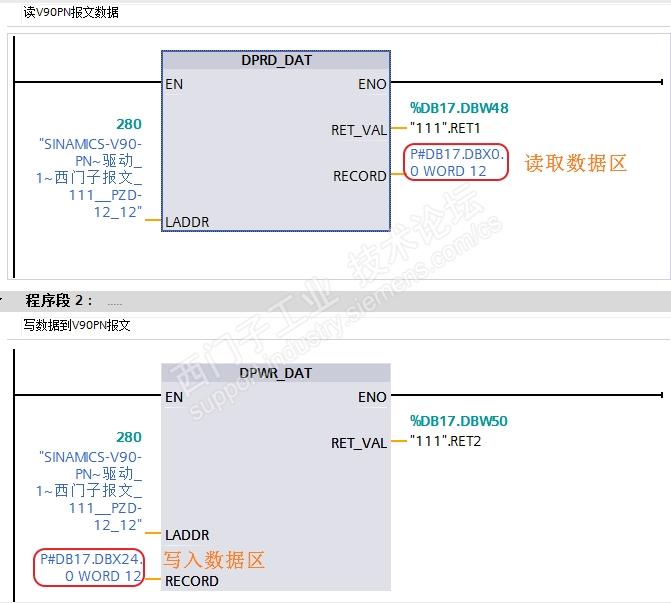
图7:一致性读取指令
(2)轴使能
伺服各种运动模式运行的前提就是先使能接通电机,这里就要提到大家耳熟能详的16#047E和16#047F了。大家用西门子G120包括V20变频器都很清楚这是停止(OFF1)和正转启动控制字,再加上速度给定就可以启停运行了。同样基于SINAMICS平台的V90PN伺服也是如此,区别就是伺服轴需要激活不同的运行任务,所以STW1.6一开始是0,由后面具体任务控制。这样V90轴使能就是把16#047E/16#047F控制字里的第6位改为0,也就是16#043E/16#043F。当然驱动器断电后再上电也需要先赋值停止控制字才能转入启动,轴使能程序如图8所示。
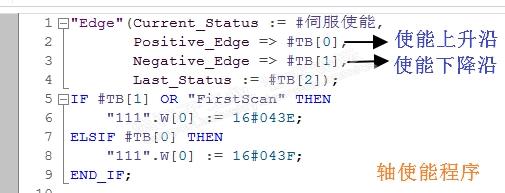
图8:轴使能
(3)设定值和反馈值
位置设定值单位是LU,速度的设定值是1000LU/分钟,111报文的OverV控制字10进制整数16384(十六进制16#4000)对应100%的速度设定值,最大设定速度是十进制32767(对应200%)。而实际速度(反馈值)因为是双字,所以十六进制的40000000H 对应100%的速度基准值(P2000的参数值),实际速度值处理程序如下所示。
#Vel_act.%W0 := "111".R[8];
#Vel_act.%W1 := "111".R[7];
#TR[0] := DINT_TO_REAL(#Vel_act);
#TR[1] :=#参考转速 *(#TR[0] / 1073741824); //16#40000000H//
#当前速度 := REAL_TO_DINT(#TR[1]);
(4)MDI控制
MDI指设定值直接给定,就是通过外部给定来控制驱动器,包括FB284里的运行模式1、2、3三种,如图9所示。

图9:MDI的模式控制
(5)回原点(主动)如图10所示

图10:主动回原点
(6)直接设置参考点
实际就是直接将POS_STW2.1置1。
(7)运行程序段如图11所示

图11:运行程序段
(8)点动/速度如图12所示

图12:点动速度
(9)点动/增量如图13所示

图13:点动增量
(10)设定值实时更改
有时我们需要在当前任务还没结束时触发新的任务(就是加载新的设定值),这时只需要POS_STW1.12置1即可(FB284里的ConfigEPos.%X8就是对应该位)。
4.程序编写注意事项
要注意运行模式切换时报文相关控制位的复位,这样不会导致现有模式的状态干扰到下一模式,比如点动模式里正转和反转位(STW1.8和STW1.9)在其他模式里就要程序里将其置0。下面是编写用于EPOS运行FB的部分程序(参考了FB284),未考虑报警还有容错等处理,只是实现基本功能演示。实际项目中我们都是用官方的FB284库,考虑更全面周到,逻辑更严谨,而且FB284库的程序代码在博途里也能看到。
IF #MODE = 2 THEN
"111".W[1].%X9 := 0;
"111".W[1].%X10 := 0;
"111".W[1].%X12 := #连续接受设定值;
"111".W[1].%X14 := 0;
"111".W[1].%X15 := 1;
"111".W[2].%X2 := 0;
"111".W[0].%X11 := 0;
"111".W[0].%X6 := #定位启动;
"111".W[2].%X5 := 0;
"111".W[1].%X8 := 1;
"111".W[0].%X8 := 0;
"111".W[0].%X9 := 0;
"111".W[2].%X9 := 0;
"111".W[2].%X1 := 0;
IF #TB[3] THEN
"111".W[0].%X6 := 0;
END_IF;
END_IF;
IF #MODE = 3 THEN
IF #正方向 AND NOT #负方向 THEN
"111".W[1].%X9 := 1;
"111".W[1].%X10 := 0;
ELSIF #负方向 AND NOT #正方向 THEN
"111".W[1].%X9 := 0;
"111".W[1].%X10 := 1;
END_IF;
IF #拒绝任务 THEN
"111".W[0].%X4 := 0;
ELSE
"111".W[0].%X4 := 1;
END_IF;
IF #暂停任务 THEN
"111".W[0].%X5 := 0;
ELSE
"111".W[0].%X5 := 1;
END_IF;
"111".W[1].%X12 := #连续接受设定值;
"111".W[0].%X11 := 0;
"111".W[2].%X2 := 0;
"111".W[1].%X14 := 1;
"111".W[1].%X15 := 1;
"111".W[0].%X6 := #定位启动;
"111".W[2].%X5 := 0;
"111".W[0].%X8 := 0;
"111".W[0].%X9 := 0;
"111".W[2].%X9 := 0;
"111".W[2].%X1 := 0;
END_IF;
IF #MODE = 4 THEN
IF #正方向 AND NOT #负方向 THEN
"111".W[2].%X9 := 0;
ELSIF #负方向 AND NOT #正方向 THEN
"111".W[2].%X9 := 1;
ELSE
"111".W[2].%X9 := 0;
END_IF;
"111".W[1].%X9 := 0;
"111".W[1].%X10 := 0;
"111".W[1].%X12 := 0;
"111".W[2].%X2 := #原点开关;
"111".W[0].%X11 := #定位启动;
"111".W[2].%X5 := 0;
"111".W[0].%X8 := 0;
"111".W[0].%X9 := 0;
"111".W[2].%X1 := 0;
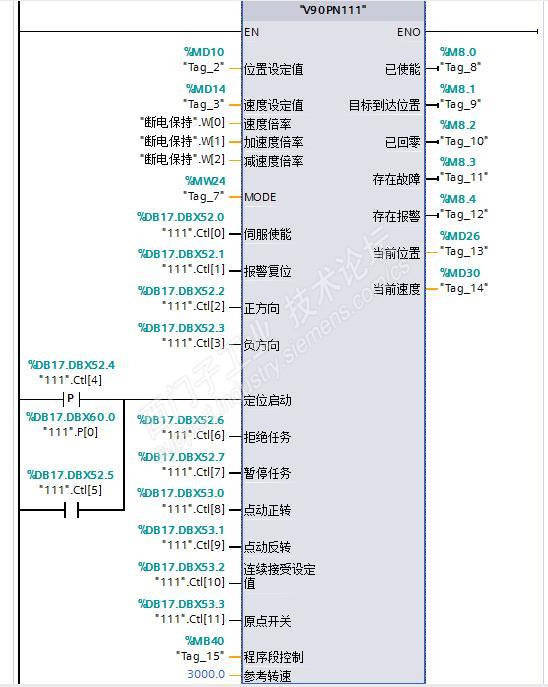
图14:自制的简易类FB284功能块
个人总结:大家知道西门子驱动器都叫SINAMICS系列,所有产品遵循通用的平台架构设计,EPOS是SINAMICS里的一个标准功能。实际上就是在变频器速度控制(通过1#报文)基础上扩展了位置控制(通过111报文)就变成了EPOS(基本定位控制),无论是什么驱动器还是离不开电流环-速度环-位置环这样一个由内及外的套路。FB284的使用跟速度控制一样很简单,因为最核心的位置环是伺服完成的,我们仅仅是操作了一下报文而已。当然PLC负责位置环也是一样(比如工艺对象),核心的位置环也是PLC系统内部完成的,我们只是调用了PLCOPEN指令完成一些逻辑控制。









 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国

 白金
白金



 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐



















 短信登录
短信登录
