| 作者 | 主题 |
|---|---|
|
菁 至圣 经验值: 11068 发帖数: 1023 精华帖: 21 |
楼主
主题:SIMATIC S7-1500与TIA博途软件的使用---连载80 以下内容节选自机械工业出版社出版的西门子自动化技术丛书----《SIMATIC S7- 1500 与 TIA博途软件使用指南》, 作者崔坚。更多更详细的内容请您参考《SIMATIC S7- 1500 与 TIA博途软件使用指南》一书。
第十章 S7-1500 PLC的PID功能 比例(Proportional)-积分(Integral)-微分(Derivative)控制器(简称PID控制器)采用闭环控制,目前在工业控制系统中广泛使用。PID控制器首先计算反馈的实际值和设定值之间的偏差,然后对该偏差进行比例、积分和微分运算处理,最后使用运算结果调整相关执行机构,以达到减小过程值与设定值之间偏差的目的。
如果PID控制器可控制一个过程系统中的执行器动作,从而影响这个过程系统的某个过程值,那么这个过程系统被称为受控系统。恰当地设置PID控制器参数,可使受控系统的过程值尽快地达到设定值并保持恒定。当PID控制器的输出值发生变化后,受控系统过程值的变化通常存在一定的时间滞后。控制器必须在控制算法中补偿这种滞后响应。 下面是通过加热系统控制室温的一个简单受控系统示例。如图11- 1所示,传感器测量室温并将温度实际值传送给控制器;控制器将温度实际值与设定值进行比较,并计算加热控制的输出值(调节变量);执行器根据调节变量进行动作,以改变供热系统的输出。
图11- 1室温控制模型
受控系统的特性取决于过程和机器的技术需求。要使某个受控系统得到有效的控制,必须为它选择一个合理的控制器类型,并考虑到该受控系统的时间滞后性而相应地调整控制器。因此,要对控制器的比例、积分和微分作用进行组态,必须精确地掌握被控系统的类型和参数。 受控系统按照其对于PID控制器输出值(以下简称输出值)阶跃变化的时间响应可分为以下几类: 1) 自调节受控系统
在比例作用受控系统中,过程值几乎立即跟随输出值变化。过程值与输出值的比率由受控系统的比例增益定义。例如管道系统中的闸门阀、分压器、液压系统中的降压功能等。
在 PT1 受控系统中,过程值的变化最初与输出值的变化成比例,但是过程值的变化率与时间呈函数关系逐渐减小,直至达到最终值,即过程值被延时了。例如弹簧减震系统、RC元件的充电、由蒸汽加热的贮水器等。
在 PT2 受控系统中,过程值不会立即跟随输出值的阶跃变化,也就是说,过程值的增加与正向上升率成正比,然后以逐渐下降的上升率逼近设定值。受控系统显示了具有二阶延迟元件的比例响应特性。例如压力控制、流速控制、温度控制等。 2) 非自调节受控系统 非自调节受控系统具有积分响应。例如流入容器的液体,过程值会趋于无限大。 3)具有/不具有死区时间的受控系统 死区时间通常指从系统的输入值发生变化,到该变化引起的系统的响应(输出值的变化)被测量出来所经历的运行时间。在具有死区时间的受控系统中,如果设定值和过程值之间出现偏差值(如存在干扰量的影响),那么受控系统的输出值的变化被延时了一段死区时间量,例如传送带控制等。
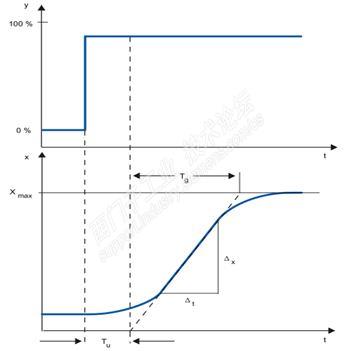
受控系统的时间响应可根据过程值x跟随输出值y的阶跃变化的时间特性来决定。大多数受控系统是自调节受控系统。受控系统的时间响应可用延迟时间Tu、恢复时间Tg和最大值Xmax等变量来大致确定。这些变量可经在阶跃响应曲线的拐点作切线得出,如图11- 2所示。
图11- 2自调节受控系统的时间响应 在许多情况下,由于过程值不能超过特定值而无法记录达到最大值的响应特性,这时采用上升率 Vmax来区分受控系统 (Vmax = Δx/Δt)的类型。 受控系统的可控性可根据比率Tu/Tg或 Tu·Vmax /Xmax来估算,规则如下表11- 1所示。
表11- 1受控系统的可控性规则
执行器是受控系统的一个部件,它受控制器影响,作用是修改质量和能量流。执行器可分为以下几种: 1) 连续信号激励的比例执行器 这类执行器可与输出值成比例关系地设置开启角度、角位置或位置,从而使输出值对过程值起到成比例关系的控制作用。输出值由一个具有连续信号输出的控制器产生。S7-1500的软件控制器PID_Compact的模拟量信号输出可连接此类型的比例执行器。 2) 脉宽调制信号激励的比例执行器 这类执行器用于在采样时间间隔内占空比与输出值成比例的脉冲输出中。输出值由一个具有脉冲宽度调制的两位控制器产生。S7-1500的软件控制器PID_Compact的脉宽调制输出可连接此类型的比例执行器。 3) 具有积分作用和三位激励信号输入的比例执行器 这类执行器通过电机频繁动作,电机运行的时间与执行器在阻塞器件中的行程成比例关系。这些阻塞器件包含阀门、遮板和闸门阀等器件。尽管这些执行器的设计不同,但它们都受到受控系统的输入值(控制器输出值)积分作用的影响。输出值由一个步进控制器(如三位控制器)产生。S7-1500的软件控制器PID_3Step的输出可连接此类型的比例执行器。 10.11.4 不同类型控制器的响应 在实际的应用中,作用在受控系统的设定值往往是变化的,并且经常受到干扰变量的影响。为提高受控系统对设定值变化和干扰变量的响应速度,必须在控制器端采取措施,最大限度地减小过程值的波动,减小达到新设定值所需的时间。控制器可能具有比例作用 (P)、比例微分作用 (PD)、比例积分作用 (PI) 或比例积分微分作用 (PID)。具有不同作用的控制器对应的阶跃响应也不同。
比例作用控制器的方程式如下:y = GAINXw,其中y是控制器的输出值,Xw是过程值与设定值之间的偏差值,GAIN是比例增益。
PD作用控制器的方程式如下:
其中y是控制器的输出值,Xw是过程值与设定值之间的偏差值,GAIN是比例增益,TD是微分作用时间,TM_LAG是微分作用的延时,t表示从控制偏差发生阶跃后的时间间隔。
PI作用控制器的方程式如下:
其中y是控制器的输出值,Xw是过程值与设定值之间的偏差值,GAIN是比例增益,TI是积分作用时间,t表示从控制偏差发生阶跃后的时间间隔。
PID控制器的方程式如下:
其中y是控制器的输出值,Xw是过程值与设定值之间的偏差值,GAIN是比例增益,TI是积分作用时间,TD是微分作用时间,TM_LAG是微分作用的延时,t表示从控制偏差发生阶跃后的时间间隔。
过程工程中的大多数控制器系统都可以通过具有PI作用的控制器进行控制。对于具有较长死区时间的慢速控制系统的情况(例如,温度控制系统),可通过具有PID作用的控制器提高控制效果。 具有PI和PID作用的控制器的优势在于,过程值在稳定后不会与设定值之间存在明显偏差。过程值在逼近过程中会在设定值周围振荡。 |










 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城


















 短信登录
短信登录
