我的地盘我做主。最近这里有点冷了。发帖热一热哈。
前段时间,栏目里曾经有提出关于高压线绕电机启动和变频调速采用转子输入控制,定子短路方案。且不说它的因地制宜的巧妙性,就说它的基本原理,应该是说得通的。
今天聊另外一个话题。最近,有需求要对一个第三方电机,用S120变频器控制,其中有一个工艺,要求对电机的加速度进行闭环控制。那么,用S120可以实现这个控制功能吗?答案是明确的。能。
利用S120的DCC功能,在变频器的控制器里,获取电机轴实时的加速度值,应该是易如反掌的事。就是转速实际值进行微分运算就可以得到了。至于规格化问题,那是技巧,这里不再赘述。
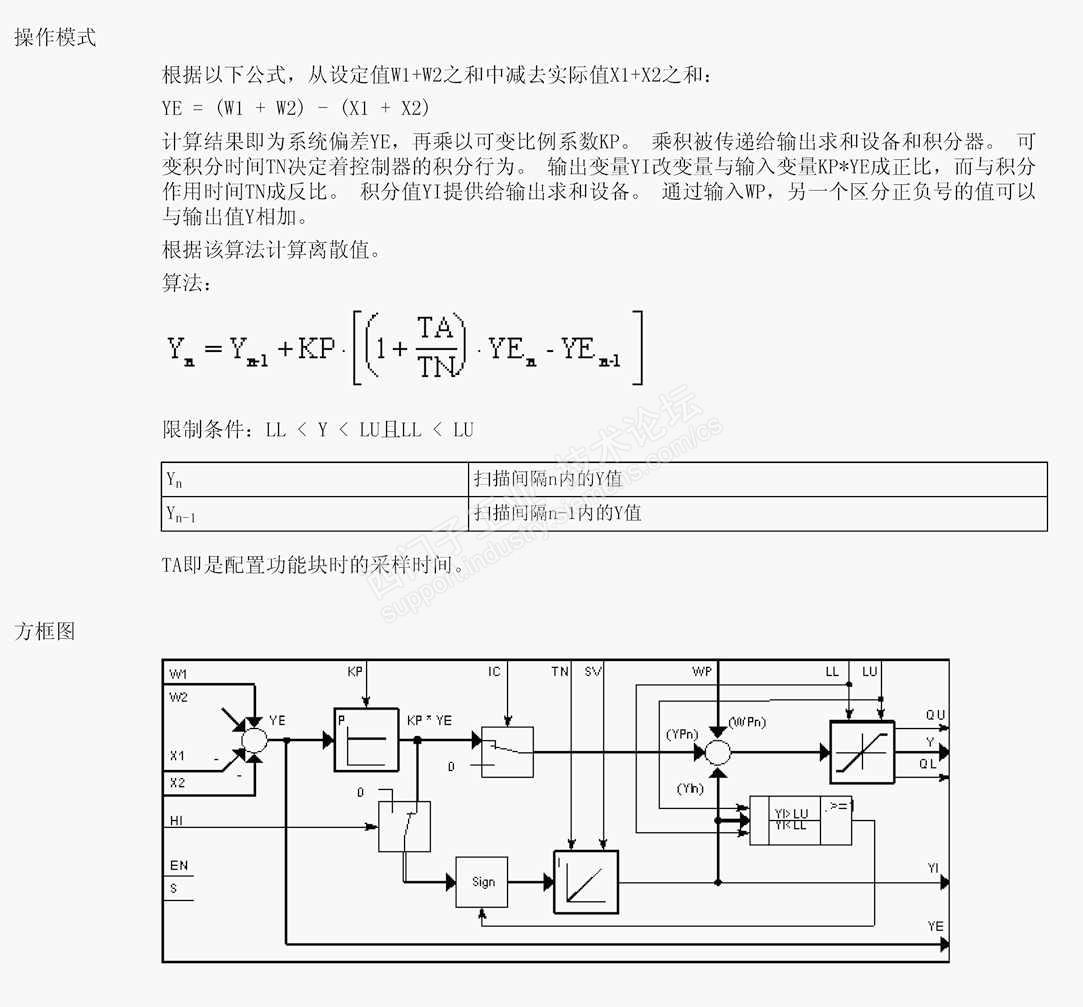
控制器呢?可以采用DCC的PIC即可。它的基本介绍如下图所示:
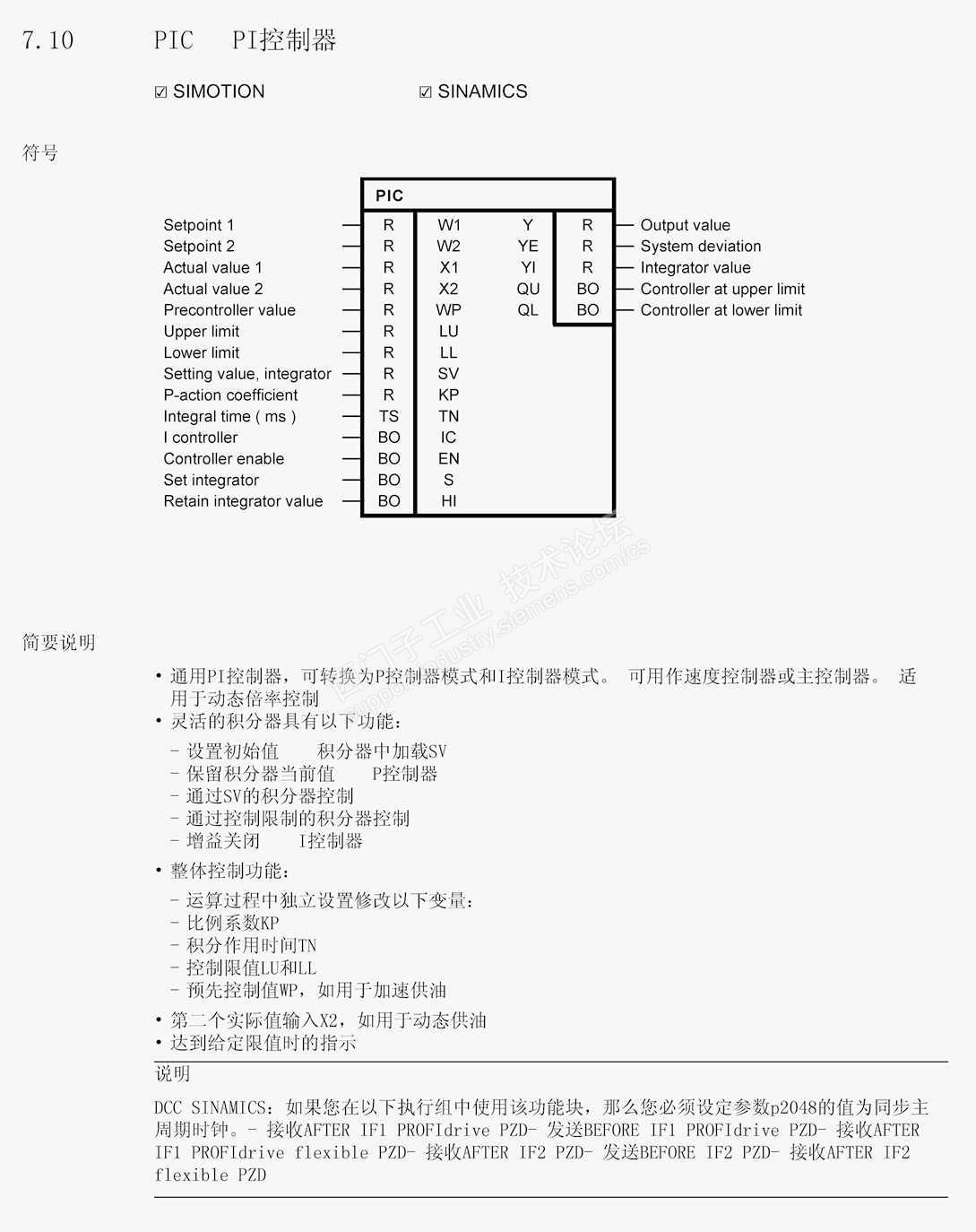
根据功能图示,这个PI调节器既可以使用传统的控制模式,也可以根据自己的个性化应用,使用先开环后闭环的控制模式。也就是设定值加反馈与给定比较的PI微调。
一开始,不太会用这个块儿,通过实测和模拟实验,找到了它们各个输入信号的关系和特点。发现效果很不错。我采用的是第二种控制模式,就是设定值加PI差值运算微调。它的特点就是开环给定可以快速阶跃给定,微调PI功能使设定值与实际值无静差。而且不易产生稳态的震荡与波动。
这个闭环控制的方式特点是,加速度实际值由装置自己生成,实时性好,响应速度快。上位机只发给定命令即可。
因为电机运行过程控制加速度是有时间限制的,原以为会出现超速或电机运行的不稳定,但实际测试和调试,发现控制电机的加速度任意恒定,也并非那么不容易,那么危险。只要限制好速度极限值,整个恒加速过程很平稳,而且在线任意转换也很平滑。
那么为什么要控制电机恒加速呢?用恒转矩不是一样也可以做到恒加速吗?这个问题一开始我也在问,但后来通过需求解释知道,这种控制,是由用户的行业需求决定的。因为用户的原动机是有另外的机构控制,而加速过程,除了我们的系统恒力控制意外,用户原动机自身还有它的传动链控制和摩擦链,我们的系统恒力控制无法实现电机的恒加速运行。加速度闭环问题由此提出。
那么,如何用上图实现设定值叠加PI差值微调呢?就是利用S端,IC端,以及WP端的输入控制来实现。









 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国

 钻石
钻石



 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐



















 短信登录
短信登录
