小弟不才,才接触西门子3个多月,由于公司要求全线用西门子的电控,临时学习的,刚好又用到一个SMC电缸的控制,本人嫌接线麻烦又是走开环控制,故采用了MODBUS的方式来控制。
再论坛上找了好多MODBUS通讯的写法,都不适合开关量,数据量同时轮询。自己尝试研究了半个月写出来的。写的不好大家可以指点下,这个程序已经试运行过可以用的
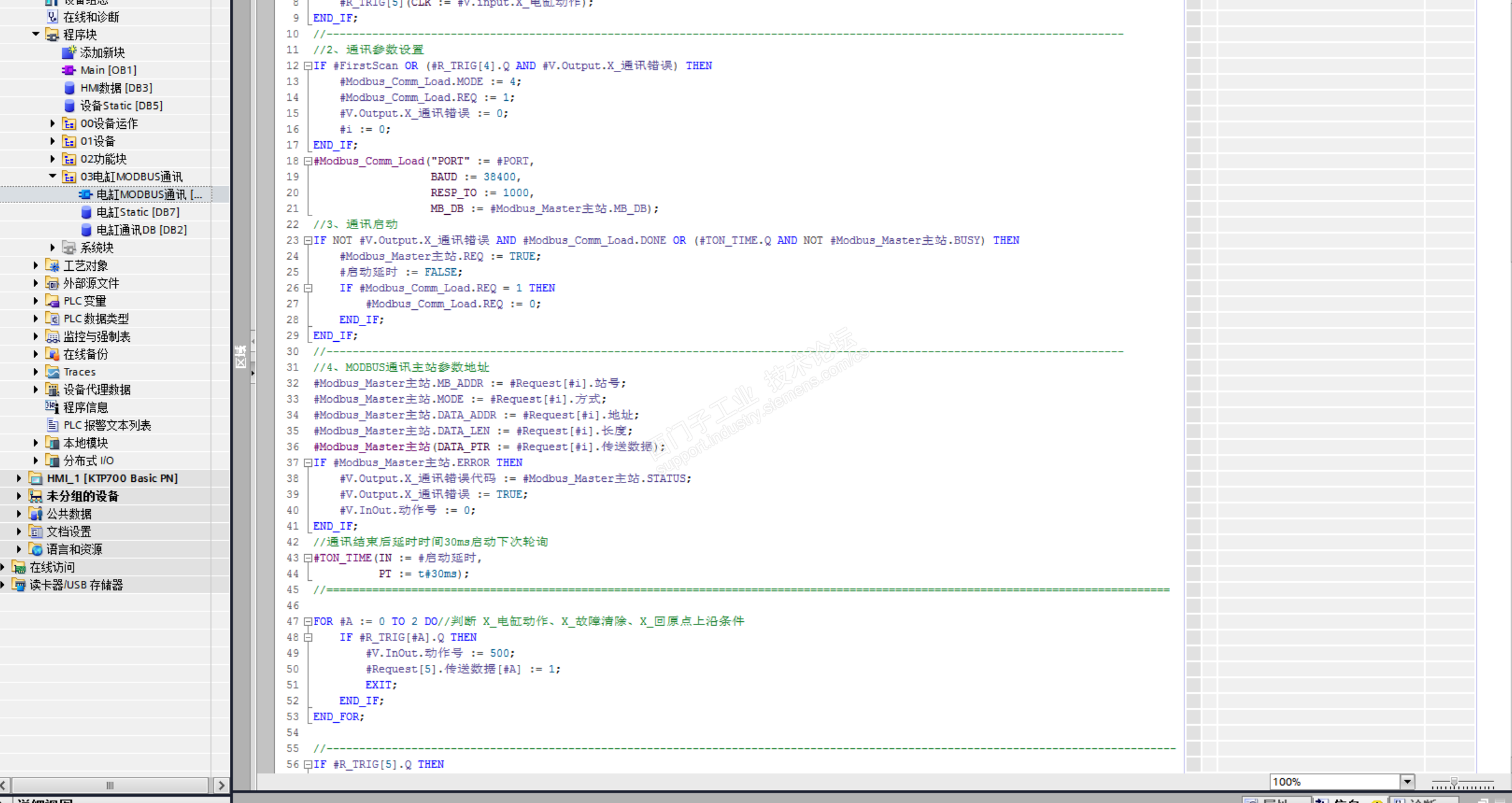
SCL代码
//===========================================================================================================================
//1、上升沿信号 R_TRIG
IF #V.Output.位状态.X_电缸使能 AND NOT #V.Output.X_通讯错误 THEN
#R_TRIG[0](CLK := #V.input.X_电缸动作 AND NOT #电缸Output读取.位状态.X_运行中 AND #IN号 = #V.input.X_IN号);
#R_TRIG[1](CLK := #V.input.X_故障清除 AND NOT #电缸Output读取.位状态.X_运行中);
#R_TRIG[2](CLK := #V.input.X_回原点 AND NOT #电缸Output读取.位状态.X_运行中);
#R_TRIG[4](CLK := #V.input.X_通讯重启 AND NOT #电缸Output读取.位状态.X_运行中);
#R_TRIG[5](CLK := #V.input.X_电缸动作);
END_IF;
//--------------------------------------------------------------------------------------------------------------------------
//2、通讯参数设置
IF #FirstScan OR (#R_TRIG[4].Q AND #V.Output.X_通讯错误) THEN
#Modbus_Comm_Load.MODE := 4;
#Modbus_Comm_Load.REQ := 1;
#V.Output.X_通讯错误 := 0;
#i := 0;
END_IF;
#Modbus_Comm_Load("PORT" := #PORT,
BAUD := 38400,
RESP_TO := 1000,
MB_DB := #Modbus_Master主站.MB_DB);
//3、通讯启动
IF NOT #V.Output.X_通讯错误 AND #Modbus_Comm_Load.DONE OR (#TON_TIME.Q AND NOT #Modbus_Master主站.BUSY) THEN
#Modbus_Master主站.REQ := TRUE;
#启动延时 := FALSE;
IF #Modbus_Comm_Load.REQ = 1 THEN
#Modbus_Comm_Load.REQ := 0;
END_IF;
END_IF;
//--------------------------------------------------------------------------------------------------------------------------
//4、MODBUS通讯主站参数地址
#Modbus_Master主站.MB_ADDR := #Request[#i].站号;
#Modbus_Master主站.MODE := #Request[#i].方式;
#Modbus_Master主站.DATA_ADDR := #Request[#i].地址;
#Modbus_Master主站.DATA_LEN := #Request[#i].长度;
#Modbus_Master主站(DATA_PTR := #Request[#i].传送数据);
IF #Modbus_Master主站.ERROR THEN
#V.Output.X_通讯错误代码 := #Modbus_Master主站.STATUS;
#V.Output.X_通讯错误 := TRUE;
#V.InOut.动作号 := 0;
END_IF;
//通讯结束后延时时间30ms启动下次轮询
#TON_TIME(IN := #启动延时,
PT := t#30ms);
//=================================================================================================================================
FOR #A := 0 TO 2 DO//判断 X_电缸动作、X_故障清除、X_回原点上沿条件
IF #R_TRIG[#A].Q THEN
#V.InOut.动作号 := 500;
#Request[5].传送数据[#A] := 1;
EXIT;
END_IF;
END_FOR;
//----------------------------------------------------------------------------------------------------------------------------------
IF #R_TRIG[5].Q THEN
#电缸Output读取.位状态.X_动作到位 := 0;
END_IF;
//IN号判读
IF #IN号 <> #V.input.X_IN号 AND NOT #电缸Output读取.位状态.X_运行中 AND #V.InOut.动作号>0 THEN
#V.InOut.动作号 := 400;
END_IF;
//5、动作流程树
IF #Modbus_Master主站.DONE THEN
#Modbus_Master主站.REQ := FALSE;
#启动延时 := 1;
//-----------------------------------------------------------------------------------------------------------------------
//#i:= 值代表含义
//0 开启电缸通讯的地址写入地址位
//1 电缸使能通讯地址
//2 电缸位状态读取
//3 电缸字状态读取
//4 IN号修改写入
//5 X_电缸动作、X_故障清除、X_回原点状态条件写入
//------------------------------------------------------------------------------------------------------------------------
IF NOT #V.input.X_模式选择 AND NOT #电缸Output读取.位状态.X_运行中 THEN//电缸动作相应参数设置判断
FOR #B := 0 TO 3 DO
IF "电缸Static".参数待写区[#B] <> #电缸参数[#B] THEN
"电缸Static".参数待写区[#B] := #电缸参数[#B];
FOR #A := 0 TO 31 DO
POKE(area := 16#84,
dbNumber := #DB地址,
byteOffset := 2692 + (#B * 42) + #A,
value := PEEK(area := 16#84, dbNumber := 7, byteOffset := 0 + (#B * 32) + #A));
END_FOR;
#i := 6 + #B;
#V.InOut.动作号 := 100;
EXIT;
ELSE
IF #V.InOut.动作号 = 100 THEN
#V.InOut.动作号 := 200;
#i := 2;
END_IF;
END_IF;
END_FOR;
END_IF;
//------------------------------------------------------------------------------------------------------------------------
CASE #V.InOut.动作号 OF
0:
IF #i = 0 THEN//开启电缸通讯的地址写入地址位
#i := 1;
ELSIF #i = 1 THEN//电缸使能通讯地址
#i := 2;
#V.InOut.动作号 := 200;
END_IF;
200://电缸位状态读取
FOR #B := 0 TO 1 DO
POKE(area := 16#84,
dbNumber := #DB地址,
byteOffset := 2414 + #B,
value := PEEK(area := 16#84, dbNumber := #DB地址, byteOffset := 2524 + #B));
END_FOR;
#V.InOut.动作号 := 300;
#i := 3;
300://电缸字状态读取
FOR #B := 0 TO 14 DO
POKE(area := 16#84,
dbNumber := #DB地址,
byteOffset := 2416 + #B,
value := PEEK(area := 16#84, dbNumber := #DB地址, byteOffset := 2566 + #B));
END_FOR;
#V.InOut.动作号 := 200;
#i := 2;
400://IN位修改参数写入
#IN号 := #V.input.X_IN号;
POKE(area := 16#84,
dbNumber := #DB地址,
byteOffset := 2608,
value := PEEK(area := 16#84, dbNumber := #DB地址, byteOffset := 2412));
#i := 4;
#V.InOut.动作号 := 410;
410://IN写入后判断是否连续动作
IF NOT #V.input.X_电缸动作 THEN
#V.InOut.动作号 := 200;
#i := 2;
END_IF;
500:// X_电缸动作、X_故障清除、X_回原点状态条件写入
#i := 5;
#V.InOut.动作号 := 510;
510:// X_电缸动作、X_故障清除、X_回原点状态条件判断若有处于开启状态进行复位
IF #Request[5].传送数据[0] OR #Request[5].传送数据[1] OR #Request[5].传送数据[2] THEN
#Request[5].传送数据[0] := FALSE;
#Request[5].传送数据[1] := FALSE;
#Request[5].传送数据[2] := FALSE;
ELSE
#i := 2;
#V.InOut.动作号 := 200;
END_IF;
END_CASE;
END_IF;
//电缸状态读取后输出
#V.Output.位状态 := #电缸Output读取.位状态;
#V.Output.字状态 := #电缸Output读取.字状态;
 SMC电缸MODBUS通讯控制.zip
SMC电缸MODBUS通讯控制.zip









 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国

 普通
普通


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐



















 短信登录
短信登录
