
主动回零方式有2种:
1.1.1设置FB284工作模式: ModePos=4(homing – homing procedure)
1.1.2将参考点挡块输入信号连接到管脚ConfigEPos bit 6
1.1.3设置EnableAxis=1使能轴
1.1.4设置ExecuteMode=1执行回参考点
轴加速到速度p2605 搜索参考点挡块。当到达参考点挡块时(Pos_STW2.2:0→1),伺服电机减速到静止状态。此时,轴开始反向加速到速度p2608,当离开参考点挡块后(Pos_STW2.2:1→0),搜索编码器的零脉冲,当遇到编码器第一个零脉冲,轴反向加速以速度p2611 运行偏执距离 p2600 后停止在参考点,并将p2599设置成参考点的位置值,V90数字量输出信号 REFOK =1。
1.1.5回参考点完成后AxisRef状态变为1
通讯报文配置为111报文,通过FB284 SINA_POS进行回零操作:
1.2.1设置FB284工作模式: ModePos=4(homing – homing procedure)
1.2.2设置EnableAxis=1使能轴
1.2.3设置ExecuteMode=1执行回参考点
轴开始寻找零点位置,轴按照P2604定义的搜索方向,以最大加速度P2572加速至搜索速度P2608,搜索零脉冲, 搜索到零脉冲后,轴以速度P2611运行偏执距离 p2600 后停止在参考点,并将p2599设置成参考点的位置值,V90 数字量输出信号 REFOK =1。
1.2.4回参考点完成后AxisRef状态变为1
绝对值编码器校准可通过以下三种方式:
2.1.1设置参考点位置坐标值(P2599)
2.1.2执行设置参考点(P2507)
2.1.3执行保存参数到ROM
可通过 BOP 功能菜单 "ABS"设置绝对值编码器的当前位置至零位。要完成此任务,按下
图操作:(校准位置值在参数 p2599 中设置。设置零位后必须保存参数。)

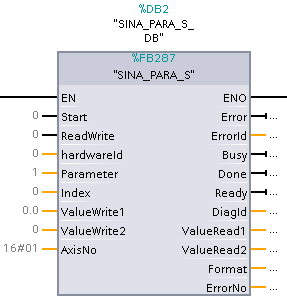
通过SINA_PARA_S FB287程序块依次修改下列参数:
1、设置EPOS参考点坐标值P2599
2、执行绝对值校准:P2507=2
3、待P2507=3后,保存参数P977=1
参数说明:
1、Start:在参数操作过程中 start 的上升沿会启动参数操作任务。
2、ReadWrite:参数=0 表示读取操作,如果等于 1 对应写入操作。
3、hardwareID: 硬件标识符。
4、Parameter:需要读写的参数号。
5、INDEX:参数下标。
6、ValueWrite1:对于浮点数格式的参数值,在此处设置为需要写入的参数数值。
7、ValueWrite2:对于整数格式的参数值,在此处设置为需要写入的参数数值。
8、AxisNo:驱动编号,V90需设置为2。
9、ERROR:出错标志位。
10、ErrorID:返回值。
11、BUSY:当写入参数执行时为 1,如果完成或者故障后变成 0。
12、DONE:任务执行完成,可以用于编写程序时复位请求使用。
13、Ready:程序块没有执行读或写操作,处于准备状态。
14、DiagId:返回值。
15、ValueRead1:在此处读取浮点数格式的参数值。
16、ValueRead2:在此处读取整型格式的参数值。
17、Format:所读参数的格式。
18、ErroNo:错误代码。
通过此方法可以设置任意位置为坐标原点。伺服电机必须处于”伺服使能”状态且保持静止状态,通过使用111报文设置参考点。此方法对增量和绝对值编码器电机均适用,但需注意使用此方法执行回零后轴的位置值断电无法保存。
3.1设置FB284工作模式: ModePos=5(homing-set home position)。
3.2设置ExecuteMode=1执行回参考点,将当前位置设置为P2599中的值。
3.3回参考点完成后AxisRef状态变为1 。