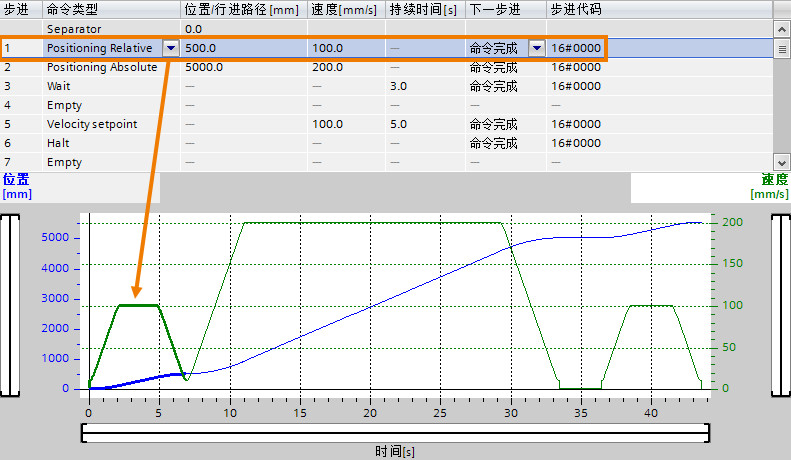
对于Positioning Relative命令,用户需要设定的是相对运动的“行进路径”值和运行“速度”值,在本例子中,相对运动的“行进路径”为500.0mm,“速度”为100.0mm/s,如下图所示,加粗部分对应的是该指令的趋势曲线。绿色表示的是命令的速度,该值从0开始加速达到设定值100.0 mm/s,匀速运行一段时间后开始减速到轴的停止速度,这时轴的位置为500.0mm,该位置值是由轴的起始位置加上相对运动的“行进路径”值得到的0.0 + 500.0 = 500.0 mm。
以下图的曲线为例,对各个命令进行详细说明:
步进1:命令类型:Positioning Relative:相对运动命令
对于Positioning Relative命令,用户需要设定的是相对运动的“行进路径”值和运行“速度”值,在本例子中,相对运动的“行进路径”为500.0mm,“速度”为100.0mm/s,如下图所示,加粗部分对应的是该指令的趋势曲线。绿色表示的是命令的速度,该值从0开始加速达到设定值100.0 mm/s,匀速运行一段时间后开始减速到轴的停止速度,这时轴的位置为500.0mm,该位置值是由轴的起始位置加上相对运动的“行进路径”值得到的0.0 + 500.0 = 500.0 mm。
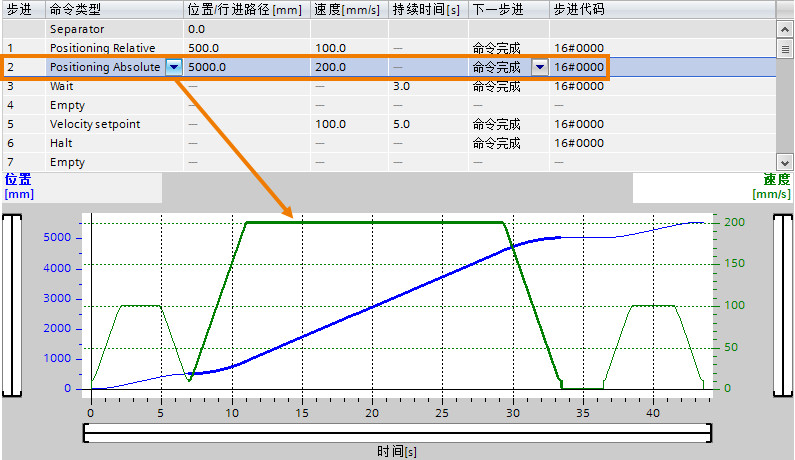
步进2:命令类型:Positioning Absolute:绝对运动命令
对于Positioning Absolute命令,用户需要设定的是绝对运动的目标“位置”值和运行“速度”值,在本例子中,绝对运动的目标“位置””为5000.0mm,“速度”为200.0mm/s。如下图所示,加粗部分对应的是该指令的趋势曲线。绿色表示的是命令的速度,该值从起始速度开始加速达到设定值200.0 mm/s,匀速运行一段时间后开始减速到轴的停止速度,这时轴的位置为5000.0mm.
『注意』命令表中没有回原点指令,用户想使用绝对位置命令之前,需要回原点。应此在这种情况下,用户需要借助MC_Home指令来得到回原点完成信号后再使用命令表的绝对定位命令。
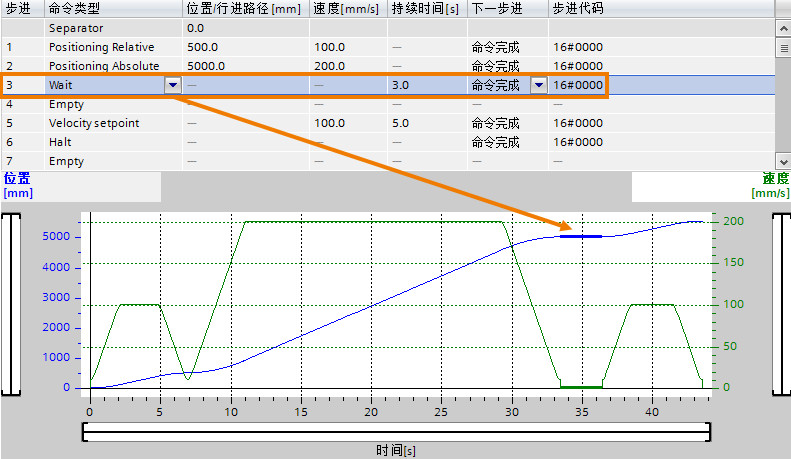
步进3:命令类型:Wait:轴等待指令
对于Wait命令,用户需要设置“持续时间”值。该指令的作用是增加一段时间延时,在这段时间内轴的状态取决于上一个命令。
在该例子中,Wait命令前是绝对定位,轴在进行完绝对定位时是停止的,因此步进3命令的结果是轴停止3.0s的时间,虽然趋势曲线中的速度值不变仍旧为200.0mm/s。
下图是Wait命令添加在Velocity setpoint指令之后的情况:
Wait命令会保持Velocity setpoint的速度值让轴继续运行3.0s的时间。
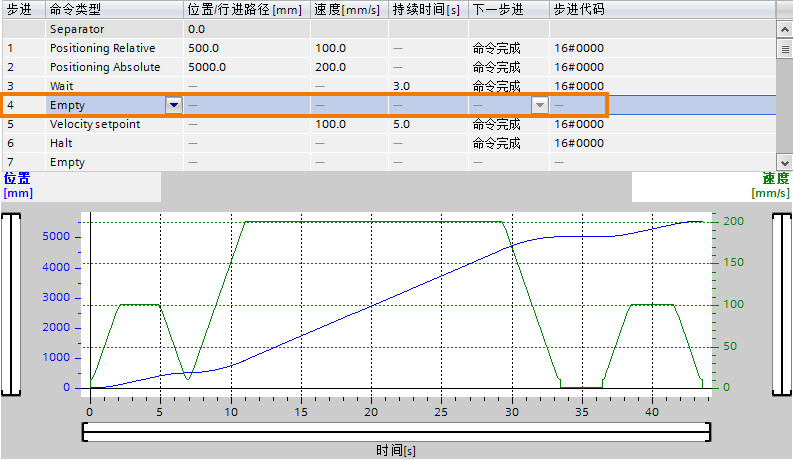
步进4:命令类型:Empty:该条目用作是添加命令占位符。 处理命令表时会忽略空条目。
如下图所示,Empty命令没有对轴有任何操作。
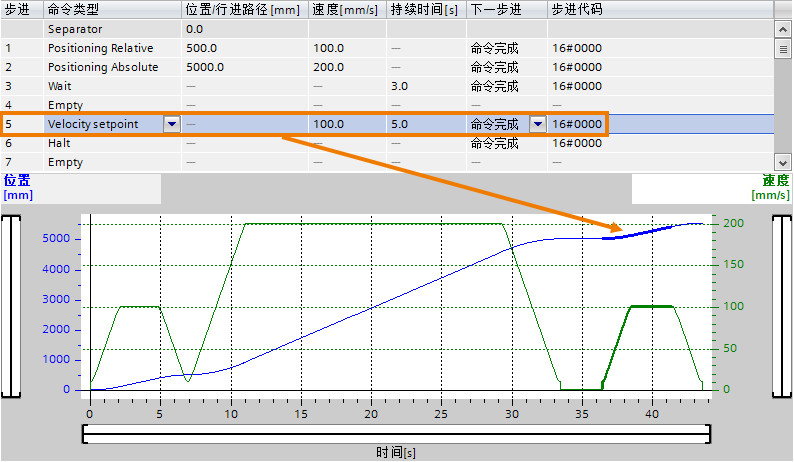
步进5:命令类型:Velocity setpoint:轴的速度运行命令,让轴以一定的速度运行。
对于Velocity setpoint命令,用户需要设定的是运行“速度”值和“持续时间”,在本例子中,速度运行命令的“速度”值为100.0mm/s,“持续时间”为3.0s。如下图所示,加粗部分对应的是该指令的趋势曲线。
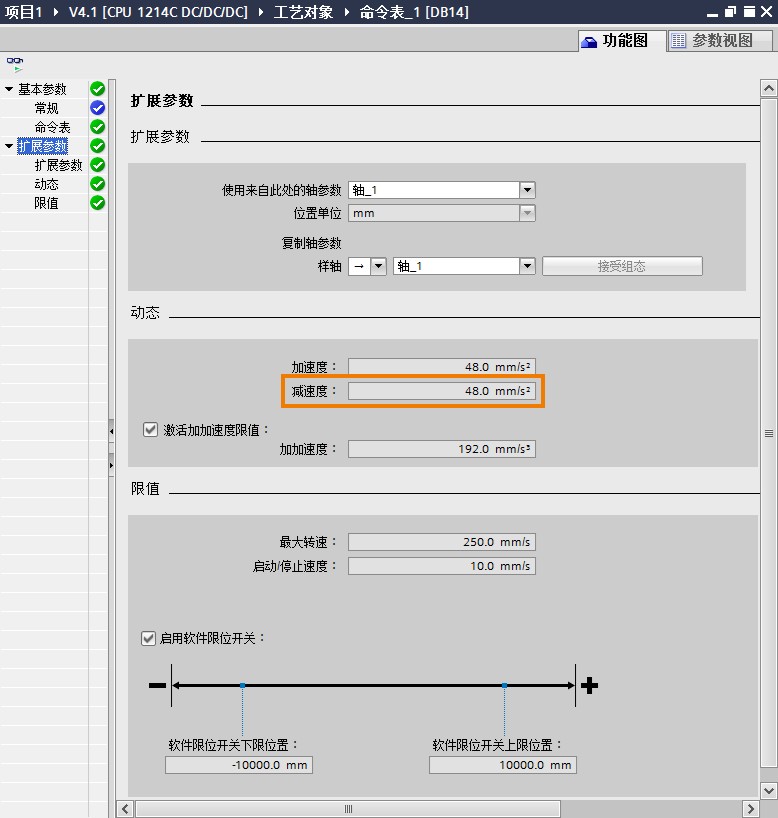
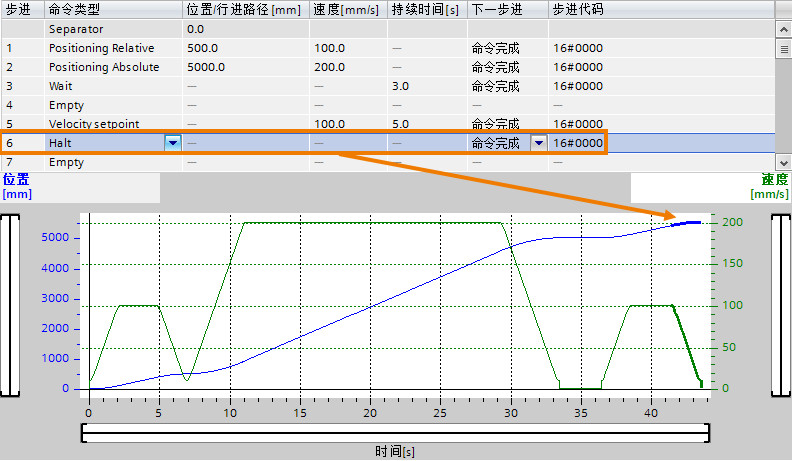
步进6:命令类型:Halt:轴的停止命令。
对于Velocity setpoint命令,用户不需要设定参数。轴会按照下图的减速度来减速停止轴。
减速曲线如下图所示:
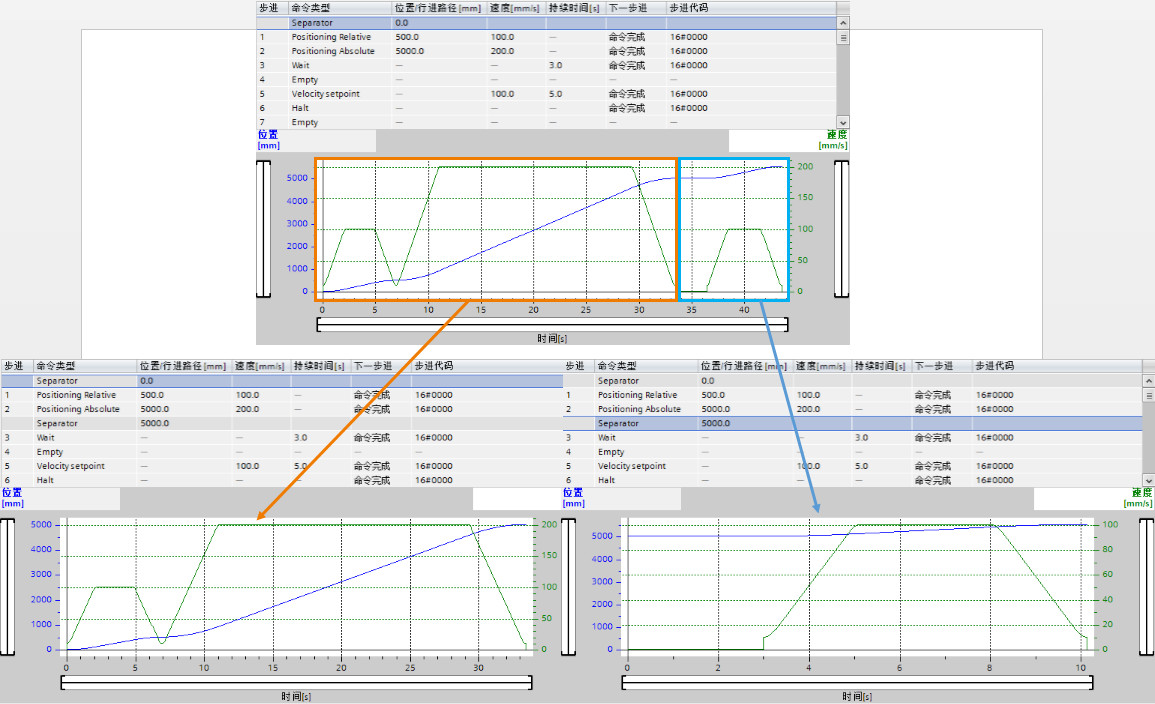
步进7:命令类型:Separator:趋势曲线显示分割命令。
将 Separator 添加到所选行的上方。 Separator 用作趋势图图形显示范围的分割,不对轴做任何操作。如下图所示,原有的趋势图分成了两个部分。