
3. 在博途中创建1500(T)与V90PN的网络连接并设置设备的IP地址及设备名称
V90 PN可以有两种方式实现位置控制,一种是激活其内部的基本定位器控制方式EPOS),另一种是在PLC中创建轴TO工艺对象。
S7-1200/1500通过FB284实现V90PN的EPOS控制
PLC通过 PROFINET 通讯连接 V90 PN,将 V90 驱动器的控制模式设置为"基本位置控制(EPOS)",使用111报文,博途中调用驱动库中的功能块FB284可实现V90的EPOS基本定位控制。主要步骤如下:
1. 安装V90 GSD文件(GSDML_file_v2.32_sinamcis_v90pn_20180321)
GSD文件下载链接:
https://support.industry.siemens.com/cs/cn/zh/view/109737269/en
2. 创建项目后添加PLC后,在网络视图中将"其他现场设备"下的V90 PN拖到网络中
3. 在博途中创建1500(T)与V90PN的网络连接并设置设备的IP地址及设备名称
4. 在设备视图中为V90添加111报文

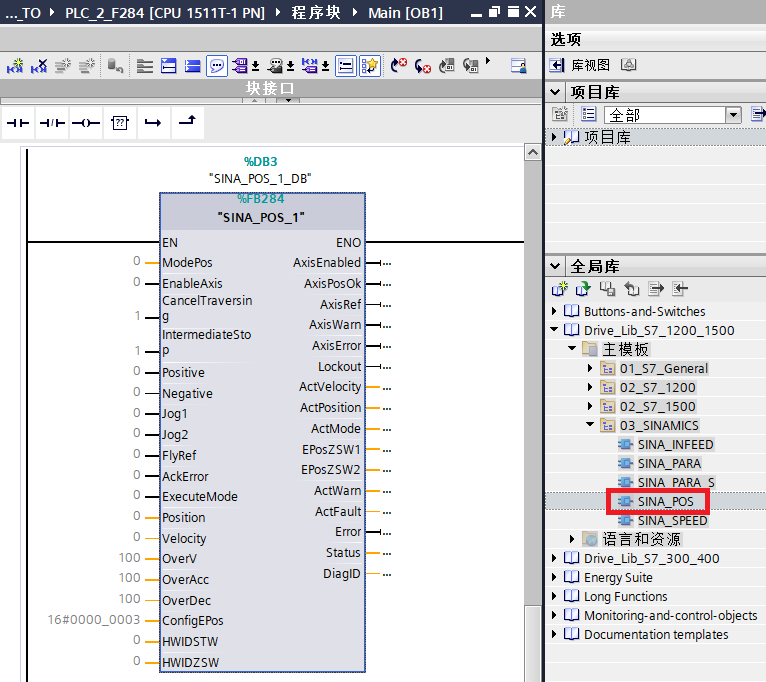
5. 调用FB284功能块
Drivelib驱动库文件下载:
https://support.industry.siemens.com/cs/ww/en/view/109475044
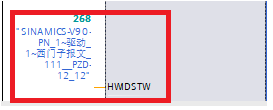
HWIDSTW:通过111通讯报文硬件标识符的确定,也可以在管脚下拉列表中选择已经配置的111报文:
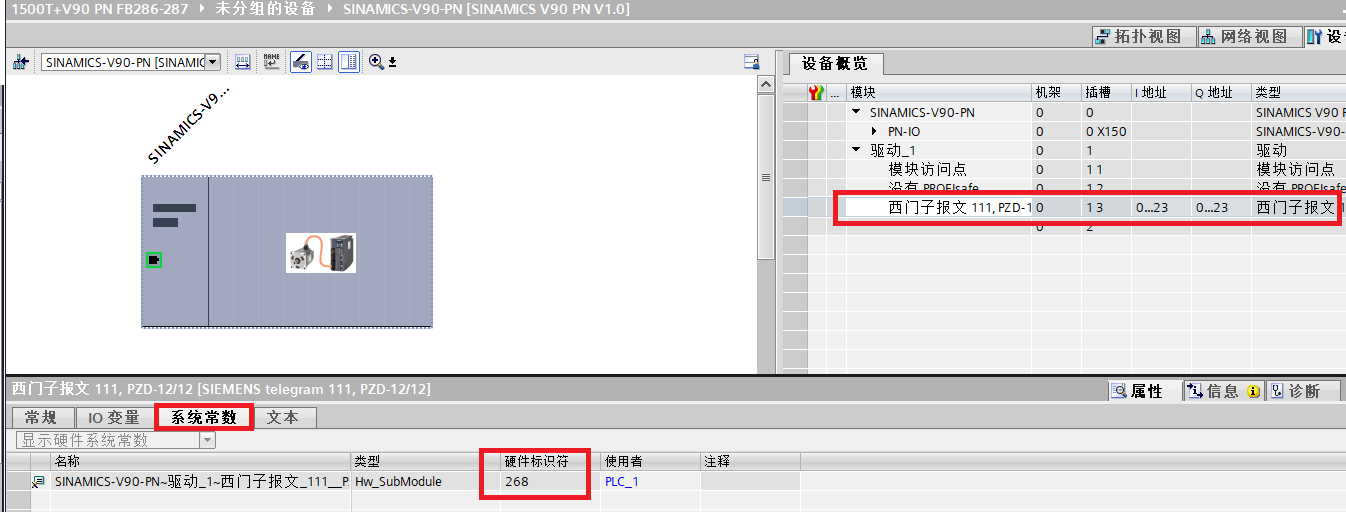
HWIDSTW、HWIDZSW管脚填写示例:
6. 控制示例
(1)绝对定位模式
• 运行模式选择 ModePos=2
• Jog1 及Jog2 必须设置为 "0"
• 轴必须已回零或编码器已被校准
• CancelTransing=1,IntermediateStop=1,
• ConfigEpos=16#00000003
• 设置目标位置Position和速度Velocity,参数 Positive 及 Negative 必须为 "0"
• 通过输入参数 OverV、OverAcc、OverDec 指定速度、加减速度的倍率,通常采取默认设置即可。
• 驱动的运行命令 EnableAxis=1
• ExecuteMode上升沿触发定位运动
(2)相对定位模式
• 运行模式选择 ModePos=1
• Jog1 及Jog2 必须设置为 "0"
• 轴可以不回零或不校正绝对值编码器
• CancelTransing=1,IntermediateStop=1
• ConfigEpos=16#00000003
• 设置定位长度Position和速度Velocity,运动方向由Postion给定的正负决定
• 通过输入参数 OverV、OverAcc、OverDec 指定速度、加减速度的倍率,通常采取默认设置即可。
• 驱动的运行命令 EnableAxis=1
• ExecuteMode上升沿触发定位运动
(3) 连续运行模式
"连续运行"模式允许轴的位置控制器在正向或反向以一个恒定的速度运行
• 运行模式选择 ModePos=3
• Jog1 及Jog2 必须设置为 "0"
• 轴不必回零或编码器未被校正
• CancelTransing=1,IntermediateStop=1
• ConfigEpos=16#00000003
• 通过输入参数 Velocity 指定运行速度,运行方向由 Positive 及 Negative 决定
• 通过输入参数 OverV、OverAcc、OverDec 指定速度、加减速度的倍率,通常采取默认设置即可。
• 驱动的运行命令 EnableAxis=1
• ExecuteMode 的上升沿触发定位运动
1200/1500 PLC使用FB284功能块可以控制V90 基本定位功能: