V90 PTI 固件版本 1.05 以上开始,伺服驱动器提供了 Modbus RTU 通信功能。PLC可以通过Modbus的FC3及 FC6功能代码读取或写入伺服驱动的寄存器,S7-200Smart可通过标准的Modbus功能块完成发送伺服驱动器的控制指令及读写驱动的参数。
1. 通信连接
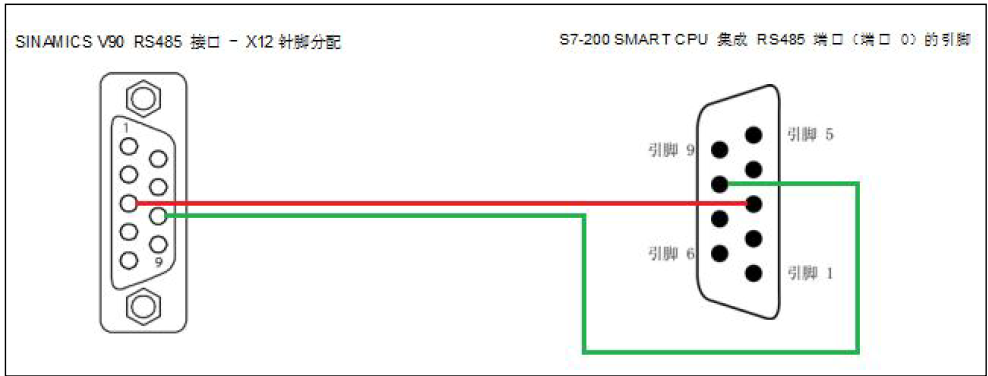
V90 伺服驱动通过 RS485 接口(X12)使用 MODBUS 协议与 PLC RS485 (端口 0) 进行通讯
2. 通过 Modbus 通信实现 V90 内部位置控制的 MDI 功能控制
(1) V90 Modbus 寄存器说明
对于不同固件版本V90 PTI,内部控制的控制数据寄存器是不同的。
对于FW V1.07及后续版本:
| 寄存器编号 | 描述 | 单位 | 定标系数 | 范围 |
| 40100 | IPOS控制模式控制字 | |||
| 40102 | MDI 位置设定值高字 | LU | 1 | -2147482648 至 2147482647 |
| 40103 | MDI 位置设定值低字 | |||
| 40104 | MDI 速度设定值高字 | 1000 LU/min |
1 | 1 至 2147482647 |
| 40105 | MDI 速度设定值低字 | |||
| 40934 | MDI 加速度倍率 | % | 100 | 0.1 至 100 |
| 40935 | MDI 减速度倍率 | % | 100 | 0.1 至 100 |
对于FW V1.07以前版本:
| 寄存器编号 | 描述 | 单位 | 定标系数 | 范围 |
| 40100 | IPOS控制模式控制字 | |||
| 40102 | MDI 位置设定值高字 | LU | 1 | -2147482648 至 2147482647 |
| 40103 | MDI 位置设定值低字 | |||
| 40932 | MDI 速度设定值高字 | 1000 LU/min |
1 | 1 至 2147482647 |
| 40933 | MDI 速度设定值低字 | |||
| 40934 | MDI 加速度倍率 | % | 100 | 0.1 至 100 |
| 40935 | MDI 减速度倍率 | % | 100 | 0.1 至 100 |
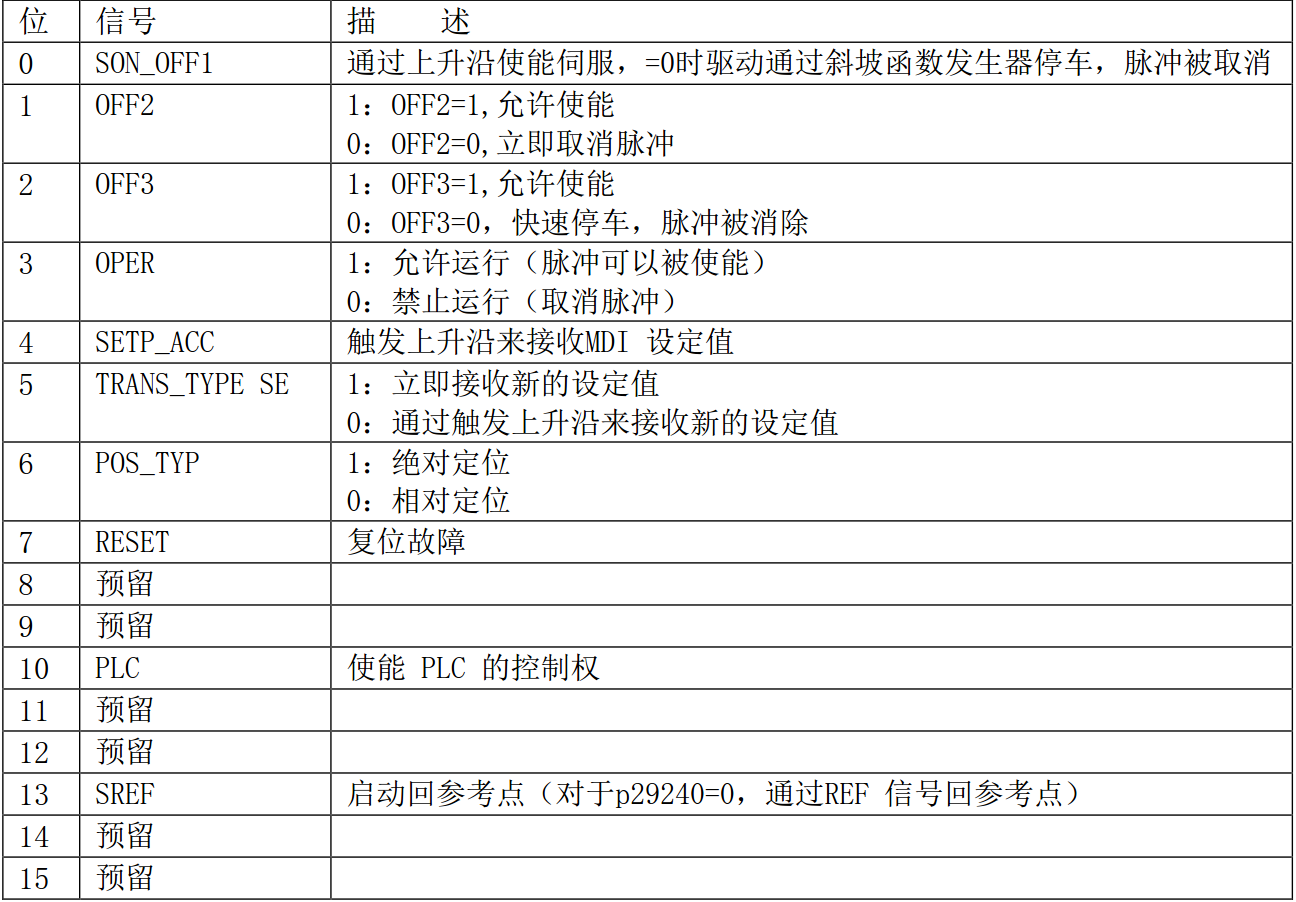
IPOS控制模式寄存器 40100控制字的定义:
3. V90参数设置
按照下表设置伺服驱动器的相关参数:

4. PLC 的编程
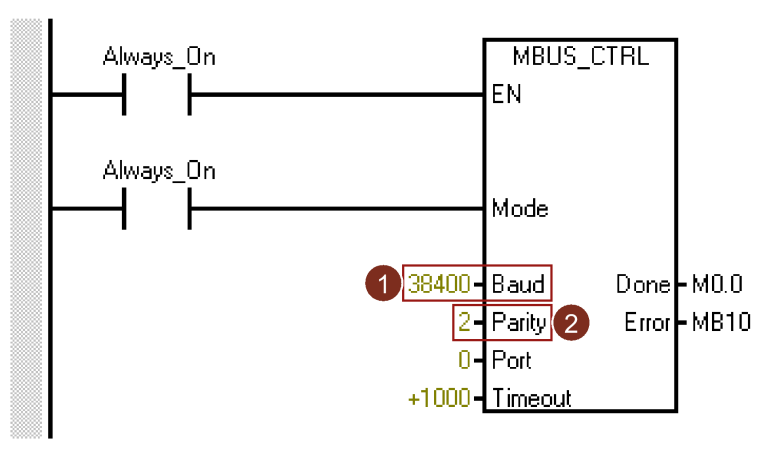
1.初始化Modbus通信接口,需确保 PLC 的波特率与驱动设置一致,设置 PLC 校验方式为偶校验(parity = 2)。
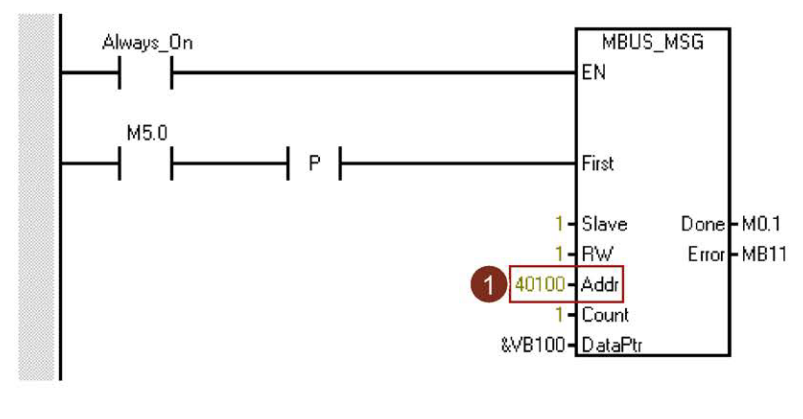
2.通过寄存器 40100 写入需要的控制字。必须设置寄存器 40100 的位 10 为 1 以允许PLC 控制驱动。使能驱动器,先将16进制数 40E 写入寄存器 40100 中,然后再写入40F。
3.如果需要对带增量编码器驱动执行回参考点操作,保持驱动为伺服使能状态,可通过写控制字 40100 第13位,执行回参考点操作。
4.通过MBUS_MSG功能块,将位置设定值、速度设定值及加速度减速度倍率写入寄存器 40102、40103、40104、40105、40934 和40935 中。
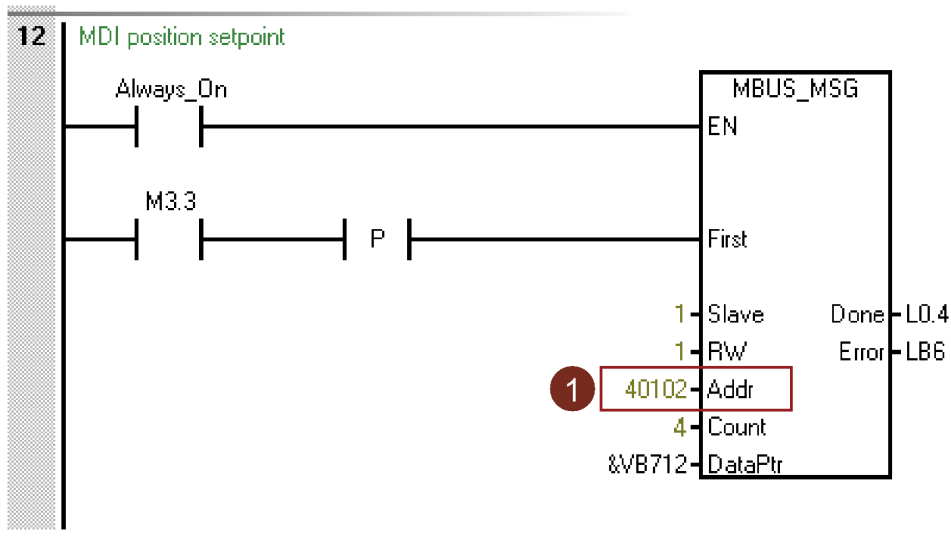
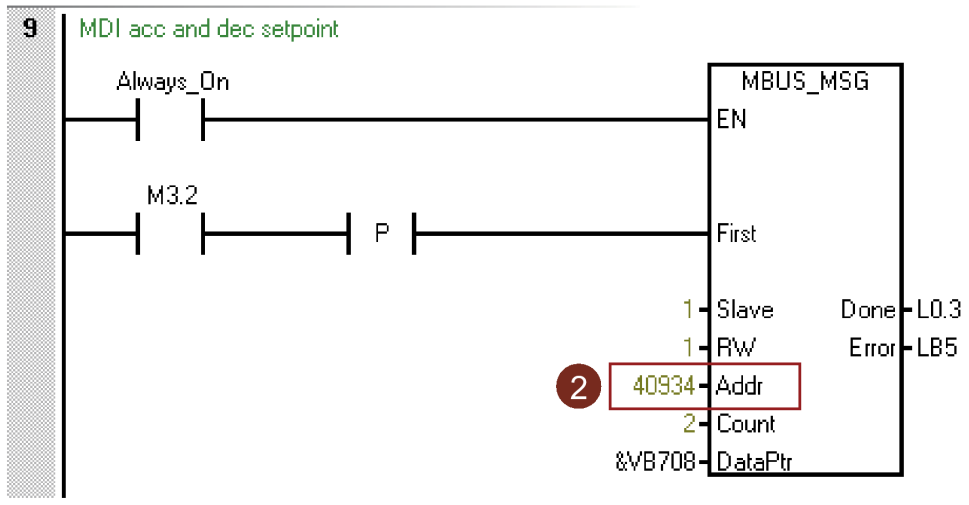
5.MDI相对定位的40100控制寄存器操作:
(1) 在IPos 控制模式中,控制字的位6=0选择相对定位模式(40F)
(2) 控制字的位5=0,设置使用上升沿来接收MDI 设定值(40F)
(3) 将寄存器写入需要的值 (如40934及40935写入十进制的10000(100%),40104/40105写入MDI速度值,40102/40103写入MDI的位置值) 后,通过PLC发送控制字的位4上升沿来接收设定值,驱动进行MDI运行(41F)。
MDI绝对定位的40100控制寄存器操作:
(1) 在IPos 控制模式中,控制字的位6=1来选择绝对定位模式(44F)
(2) MDI设定值的生效有两种:
MDI设定值立即生效: 控制字的位5=1,设置接收的MDI设定值立即生效(46F);
上升沿来接收MDI设定值:控制字的位5=0,设置使用上升沿来接收MDI 设定值(44F)
(3) 将寄存器写入需要的值 (如40934及40935写入十进制的10000(100%),40104/40105写入MDI速度值,40102/40103写入MDI的位置值)后,如果是MDI设定值立即生效,则驱动进行MDI运行。如果是通过上升沿接收MDI设定值,则通过PLC发送控制字的位4的上升沿来接收设定值(45F),驱动进行MDI运行。
![]() ModBus通信最多能带多少个站点?
ModBus通信最多能带多少个站点?
最多32个。