
P29300(PTI 强制数字输入信号)
V90 PTI运行前需连接正负限位开关及急停开关,如未接线也可通过设置参数 p29300强制置位相关的信号,P29300中可以配置的六个信号对应关系如下表所示。
例如强制正、负限位开关需要设置P29300=6(2#0000110)。
P1215(抱闸控制)
设置 p1215=1,则电机抱闸在数字量输入信号 SON 上升沿时打开,而在 SON 下降沿时关闭。可以通过参数 p1216 和 p1217 为电机抱闸的关闭或打开时间设定延时,时间设置不准会导致负载移动。
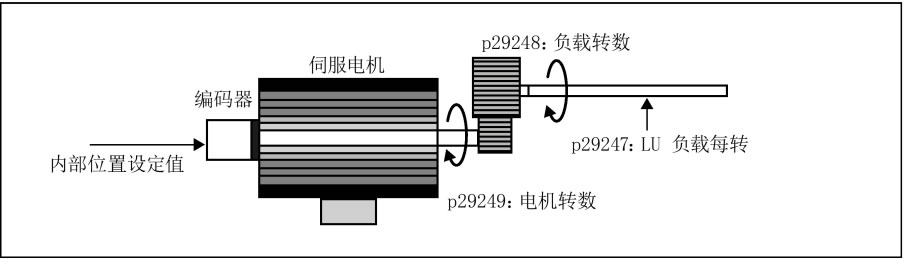
P29247/P29248/P29249(LU设置)
在V90 EPOS工作模式下,通过设置机械参数,可建立实际运动部件和脉冲当量(LU)之间的联系。主要参数 p29247(LU 负载每转)、p29248(负载转数) 和 p29249(电机转数) 设置机械齿轮比。
P2546(动态跟随误差监控)
EPOS工作模式下,设置动态跟随误差监控公差。 当动态跟随误差(r2563)超过设置值时驱动器报警F7452跟随误差过大。P2546=0 :禁用动态跟随误差监控。
P2572/P2573(EPOS加减速度)
EPOS工作模式下,P2572设置最大加速度,P2573设置最大减速度。
P2542(设置静止监控功能的静止窗口)/P2543
EPOS工作模式下,静态监控时间结束后会循环检查,"设定-实际"差值是否在静态窗口中,必要时输出故障信息F07450。 值 = 0:取消激活静止监控。P2542:设置静止监控功能的静止窗口,p2543:设置静止监控功能的静止监控时间。
P29001(更改电机运行方向)
设置参数 p29001 可更改电机运行方向,p29001=0:正向(默认),p29001=1:反向。
P2544(定位窗口/P2545)
EPOS工作模式下,当轴的位置设定值进入到定位窗口后并不再改变时,在定位监控时间(P2545)内轴的位置实际值也需要进入到定位窗口(P2544),此时驱动器会给出已到达目标位置的信号。如果轴的实际位置在定位监控时间内还没有进入定位窗口,V90便输出故障F07451。
P29151(用户定义发送字)
EPOS工作模式下,如选用111报文,V90发送给PLC的用户自定义的发送字(PZD12)可通过设置p29151定义。p29151 = 0:无功能,p29151 = 1:实际扭矩,p29151 = 2:实际电流绝对值,p29151 = 3:DI 状态
P2000(参考转速)
当PLC发送或读取V90的转速时,以P2000做为速度的基准(100%)。
P29050(扭矩正限值)/p29051(扭矩负限值)
设置目标扭矩限制。内部扭矩限制 TLM 和全局扭矩限制中,值较小的一组为实际生效的扭矩限制。
内部扭矩限制 TLM:
– p29050[0] → 扭矩正限值
– p29051[0] → 扭矩负限值
全局扭矩限制
– p1520 → 扭矩正限值
– p1521 → 扭矩负限值。
![]() 修改驱动参数掉电后丢失怎么办?
修改驱动参数掉电后丢失怎么办?
修改参数掉电前需要执行COPY RAM TO ROM操作。操作前需撤销伺服使能SON;
使用BOP操作时参考如下步骤:

使用V-ASSISTANT软件时执行如下步骤:菜单栏"工具"-"保存参数到ROM"