������Ҫ���������ʹ��CPU 1215Cͨ��PROFINET ����SINAMICS V90�ŷ�ϵͳʵ��λ�ñջ����ơ����ж�S7-1200 V4�̼��汾���˶����ƹ��ܡ����ն������̬��V90 PN����ز����������˼�Ҫ���ܡ�
S7-1200 CPU�̼��汾��V3.0��ʼ�Ѿ�֧�����4·PTO�������CPU1214C��6ES7214-1AG31-0XB0��Ϊ������CPU����֧��4·PTO���������PTO 1��PTO 2��Ƶ�ʷ�ΧΪ 2 Hz �� f �� 100 kHz��PTO 3 ��PTO 4��Ƶ�ʷ�ΧΪ2 Hz �� f �� 20 kHz��
S7-1200 CPU V4.0�̼��汾��ȻҲֻ֧��4·PTO���������PTO���ź����Ϳ��Խ���ѡ��֧�ֵ��ź����ͼ���2-1 PTO �ź�������ʾ��
|
�ź����� |
���巢���������Ŀ |
|
���� A �� ���� B�����÷�������� |
1 |
|
���� A �� ���� B |
2 |
|
�Ӽ��� A �ͼ����� B |
2 |
|
A/B ���� |
2 |
|
A/B ���� - �ı�Ƶ |
2 |
��2-1 PTO�ź�����
V4.0�̼��汾��CPU���������źŷ����������ַ�������ɷ����PTO�������ַ���������Ƶ�ʷ�Χ����2-2 �����źŷ�������ַ������ʾ��
| Q0.0 | Q0.1 | Q0.2 | Q0.3 | Q0.4 | Q0.5 | Q0.6 | Q0.7 | Q1.0 | Q1.1 | |
| CPU1211C(DC/DC/DC) | 100kHz | 100kHz | 100kHz | 100kHz | - | - | - | - | - | - |
| CPU1212C(DC/DC/DC) | 100kHz | 100kHz | 100kHz | 100kHz | 20kHz | 20kHz | - | - | - | - |
| CPU1214C(DC/DC/DC) | 100kHz | 100kHz | 100kHz | 100kHz | 20kHz | 20kHz | 20kHz | 20kHz | 20kHz | 20kHz |
| CPU1215C(DC/DC/DC) | 100kHz | 100kHz | 100kHz | 100kHz | 20kHz | 20kHz | 20kHz | 20kHz | 20kHz | 20kHz |
| CPU1217C(DC/DC/DC) | 1MHz | 1MHz | 1MHz | 1MHz | 100kHz | 100kHz | 100kHz | 100kHz | 100kHz | 100kHz |
��2-2 �����źŷ�������ַ����
��CPU1214C CPU���������ַ(6ES7214-1AG40-0XB0)Ϊ����ʾ�����ֿ��ܵ�PTO�ź�������Ϸ�ʽ������2-3 ���巽����̬��ʾ��
l ʾ��1��4-100kHz PTO���������������
l ʾ��2��2-100kHz PTO �� 2-20kHz PTO������A+����B�����
l ʾ��3��4-100kHz PTO������A+����B�������������A 100kHz������B 20kHz��
P=���� D=���� |
CPU������� | ||||||||
| 100kHz��� | 20kHz��� | ||||||||
| Q0.0 | Q0.1 | Q0.2 | Q0.3 | Q0.4 | Q0.5 | Q0.6 | Q0.7 | ||
| ʾ��1 | PTO1 | P | |||||||
| PTO2 | P | ||||||||
| PTO3 | P | ||||||||
| PTO4 | P | ||||||||
| ʾ��2 | PTO1 | P | D | ||||||
| PTO2 | P | D | |||||||
| PTO3 | P | D | |||||||
| PTO4 | P | D | |||||||
| ʾ��3 | PTO1 | P | D | ||||||
| PTO2 | P | D | |||||||
| PTO3 | P | D | |||||||
| PTO4 | P | D | |||||||
��2-3 ���巽����̬
S7-1200 CPU V4.1�̼��汾��֧��ͨ��PTO�����ʽ���ŷ�������п�������������֧��ͨ��PROFIdrive����ģ���������AQ����ʽ���ŷ�������бջ����ƣ�����2-4���������ӷ�ʽ��ʾ�����������Ӿ���ʹ��PROFIdrive��ʽ��SINAMICS V90 PN���бջ����ơ�
| ���������� | ��ıջ�/�������� | ���������� |
|---|---|---|
| PTO | �ٶȿ��ơ����� | - |
| ģ������� | λ�ÿ��ơ��ջ� |
|
| PROFIdrive | λ�ÿ��ơ��ջ� |
|
��2-4 ���������ӷ�ʽ
SINAMICS V90 ���������Ƴ���һ��С�͡���Ч��ݵ��ŷ�ϵͳ��SINAMICS V90 �������� SIMOTICS S-1FL6 �����ɵ��ŷ�ϵͳ�������ͨ���ŷ��г���������Ʒ������0.05kW��7kw ���ʷ�Χ��
2016 �� 7 �µף��Ƴ��˴�PROFINET �ӿڵ� V90 �����������SIEMENS PLC, �ܹ����һ�����Ƶġ����õġ��ɿ����˶����ƽ��������SINAMICS V90 PROFINET (PN) �汾�� 2��RJ45 �ӿ������� PLC �� PROFINET ͨ�����ӣ�֧�� PROFIdrive �˶�����Э�顣��Ҳ���Լ��ɵ���;���� S7-1200��S7-1500 ���ӡ�
ע�⣺
(1) SINAMICS V90 PN ֧�� SIMATIC PLC �Ĺ��ն���(TO)����ͨ�� TO ʵ��λ�ü��ٶȵĿ��ƣ��� S7-1500 T-CPU, S7-1500 �� S7-1200��
(2) SINAMICS V90 PN �汾�����ڵ�ǰ�� SINAMCIS V90 ���崮�Ŀ�����������֧�� PTI������ӷ���ģ������USS/Modbus RTU ͨ�ŵȿ��Ʒ�ʽ��
(3) SINAMICS V90 PN ֻ֧�� PROFINET ͨ�ţ�֧�������ӱ����� 1��2��3��5��102��105��֧�� DSC���ơ������� SINAMICS V90 PN ��Ҫѡ�������3��
PROFINET IO ��һ�ֻ�����̫����ʵʱЭ�顣�ڹ�ҵ�Զ���Ӧ������Ϊ������ʹ�á�һ��������POFINET IO ������������豸��
l IO �����������͵��� PLC�����ڿ�������ϵͳ
l IO �豸��һ����ɢʽ IO �豸�����磬������������������ͨ�� IO ����������
l IO �������HMI���˻��ӿڣ�����˼������������ϻ����
PROFINET �ṩ����ʵʱͨ�ţ�PROFINET IO RT��ʵʱ���� PROFINET IO IRT����ʱʵʱ����ʵʱͨ������ IO ���ݺͱ����Ĵ��䡣�� PROFINET IO RT ͨ���У�ʵʱ����ͨ��������̫��֡���д��䡣û�������Ӳ��Ҫ��
SINAMICS V90 PN����PROFINET IO RT��ʵʱ������ѭ�����ڿɴﵽ 4 ms������PROFINET IO IRT ͨ�������ڴ�����и��Ӿ�ȷʱ��Ҫ������ݡ���ѭ�����ڿɴ� 2 ms������Ҫ��������Ӳ���� IO �豸�Ϳ��ص�֧�֡�
���е���Ϻ���������ͨ����ʵʱ��NRT��ͨ�����д��䡣ʹ�� TCP/IP Э�顣�����û�п�ȷ����ѭ�����ڣ���ѭ�����ڿ��ܳ��� 100 ms��
SIMATIC S7-1200 Ŀǰ��֧��PROFINET IO RT ͨѶ�����Ժ����½��������� SINAMICS V90 PN ������λ�ÿ�����ͨ��PROFINET IO RT ͨѶ��ʵ�ֵġ�
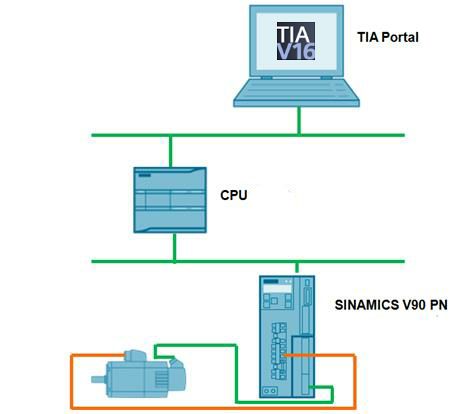
ͼ3-1�ṩ���Զ�������ĸ�����S7-1200 CPU ͨ��PROFINET �������V90 PN �ŷ���������
ͼ3-1 �Զ����������
�������ӻ�������ʹ�û���������
|
��� |
���� |
������ |
ע�� |
|
SIMATIC S7-1200 CPU |
1 |
6ES7 215-1AG40-0XB0 |
V4.4 |
|
SINAMICS V90 PN 200V |
1 |
6SL3210-5FB10-1UF0 |
100W |
|
SIMOTICS S-1FL6 motor |
1 |
1FL6024-2AF21-1AA1 |
100W |
|
��� |
���� |
ע�� |
|
TIA Portal |
1 |
V16 |
|
SINAMICS V-ASSISTANT |
1 |
V1.06.00 |
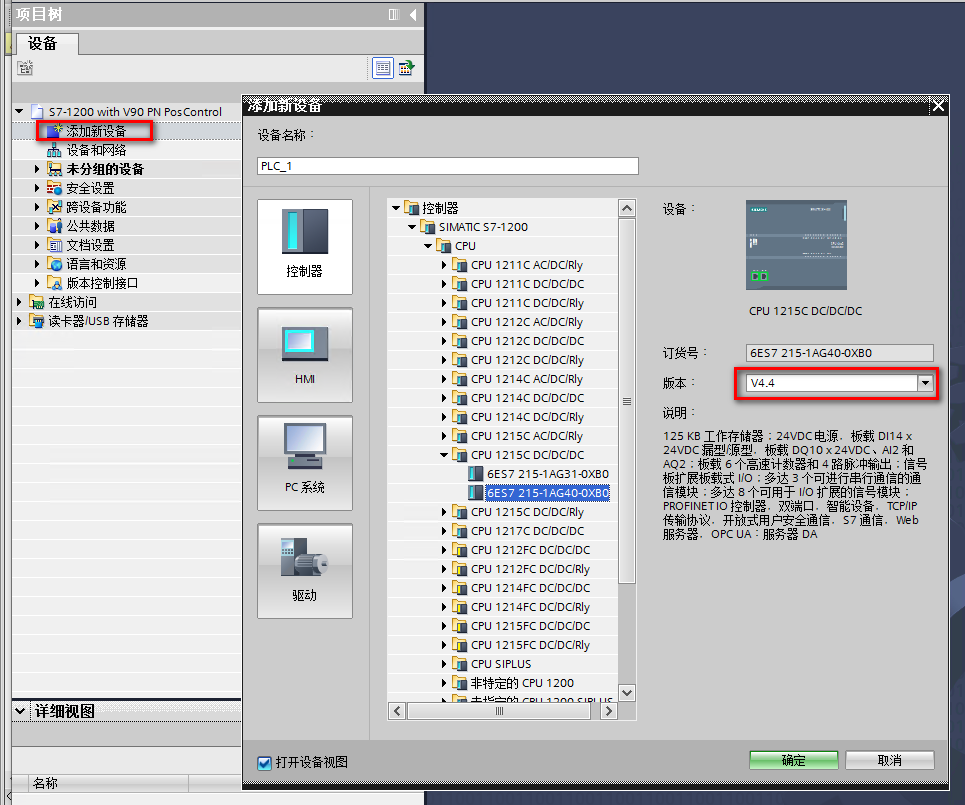
ѡ�����б���ͼ3-2��������ѡ������� 3��
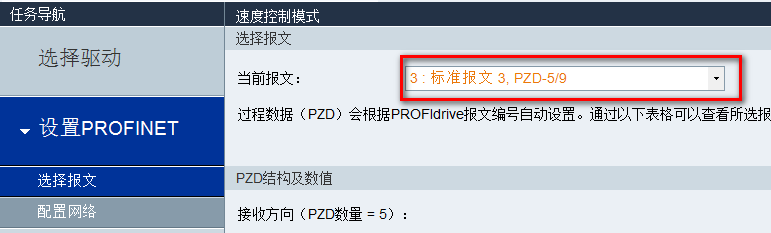
ͼ 3-2 ѡ����
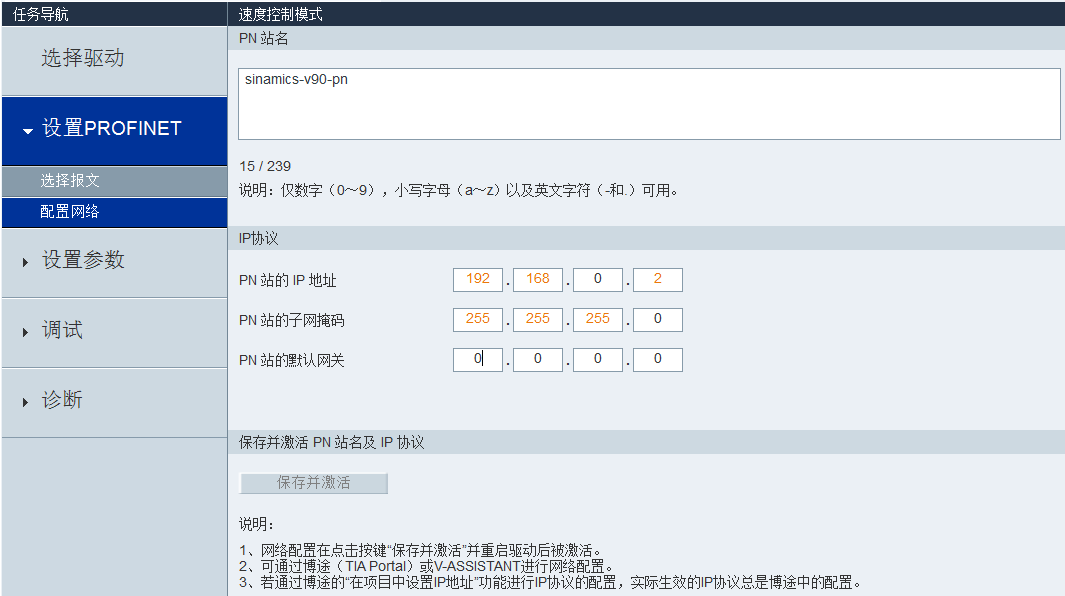
ͼ 3-3 ����IP��ַ���豸����
1.�����豸���ƣ��ڱ����У��豸����Ϊ sinamics-v90-pn��
2.���� IP ��ַ���ڱ����У�IP ��ַΪ192.168.0.2��
3.���������豸�����Լ� IP ��ַ֮���뱣������������������������á�
4.���������Ϣ�������Ҳ����в鿴��
ע���䱸���ƺ� IP ��ַҲ������ TIA Portal �н������á�
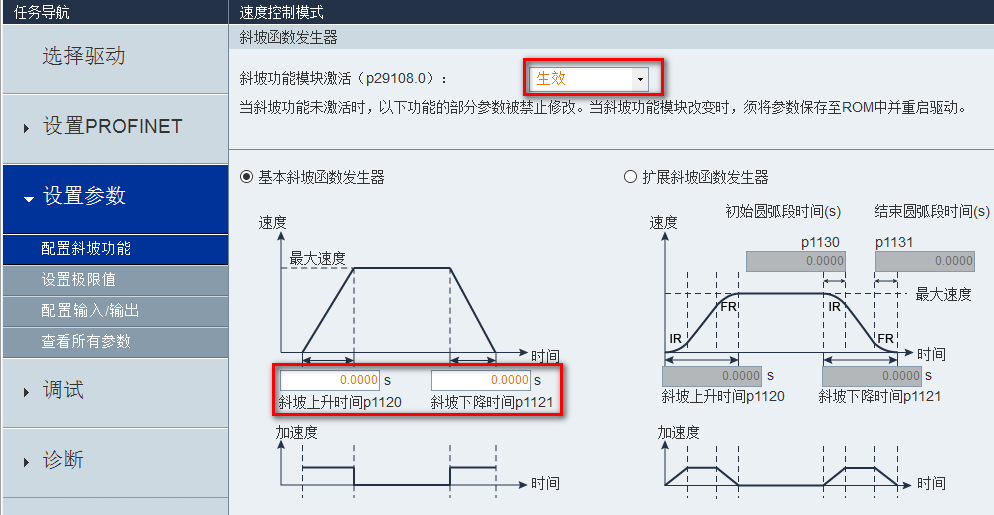
ͼ3-4 ����б�º���������
ע������ S7-1200 �Ṥ�ն������Ѿ���̬�������еļӼ���ʱ�䣬������ SINAMICS V-ASSISTANT ����Ҫ����б�¹���ģ�鲢��б������ʱ���б���½�ʱ������Ϊ0.0000 S���ɡ�
1.��TIA ��;��������������Ŀ

ͼ3-5 ��������Ŀ
2.���뵽��Ŀ��ͼ����S7-1200 CPU����Ŀ
ͼ3-6 ����S7-1200 CPU����Ŀ
3.���뵽������ͼ����Ӳ��Ŀ¼
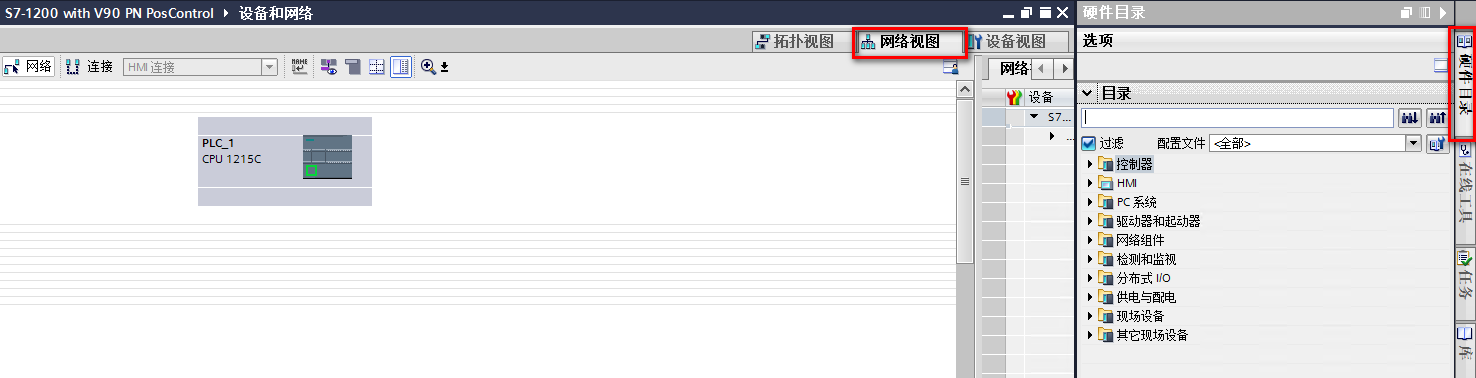
ͼ3-7 ������ͼ
4.�Ҳ�Ӳ��Ŀ¼���С������ֳ��豸����ѡ��V90 PN��
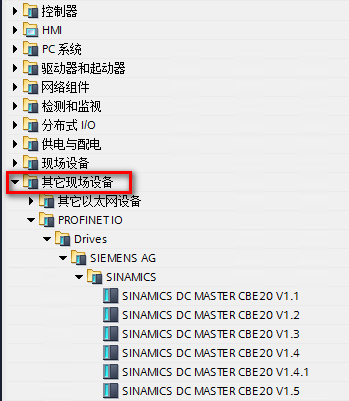
ͼ3-8 ѡ�������ֳ��豸
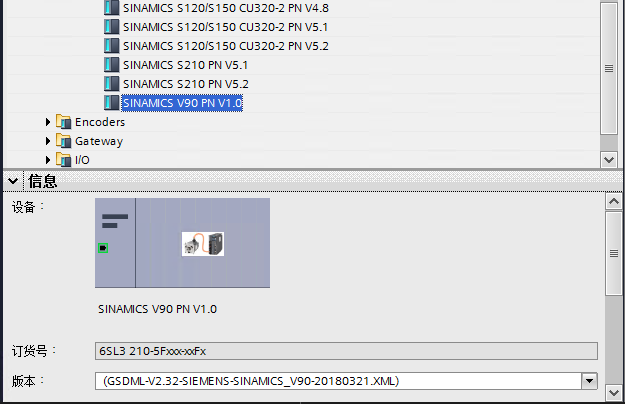
ͼ3-9 ѡ��V90 PN
5.˫��V90 PN����קV90 PN��������ͼ��
ͼ3-10 ������ͼ
˫��S7-1200 CPU����CPU���ԣ���"PROFINET�ӿڣ�X1��"�п�������IP��ַ���豸���Ƶ���Ϣ��
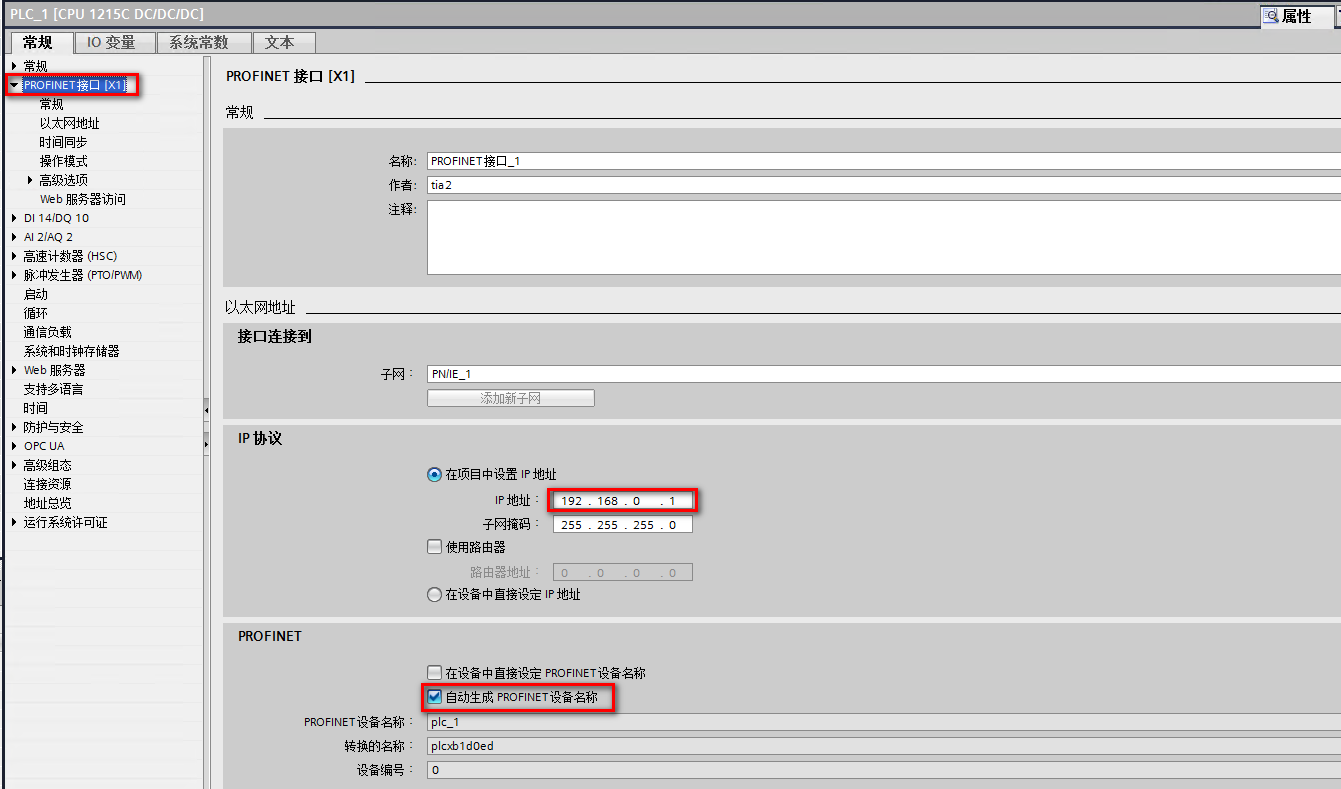
ͼ3-11 ����IP��ַ���豸���Ƶ���Ϣ
1. ������ͼ��˫�� SINAMICS V90 PN�������������ڡ�PROFINET�ӿڣ�X1�����п�������IP��ַ���豸���Ƶ���Ϣ��
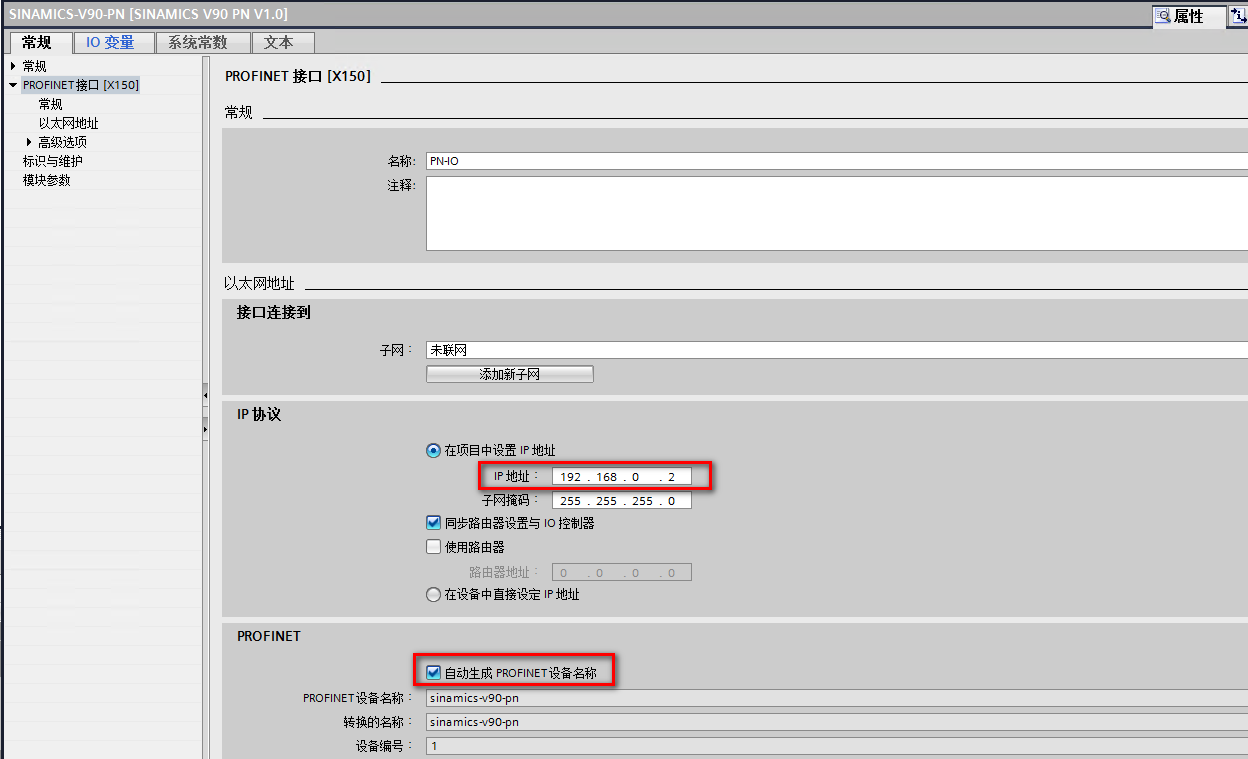
ͼ3-12 ����IP��ַ���豸���Ƶ���Ϣ
2.Ӳ��Ŀ¼�£�����ģ����ѡ�������3��
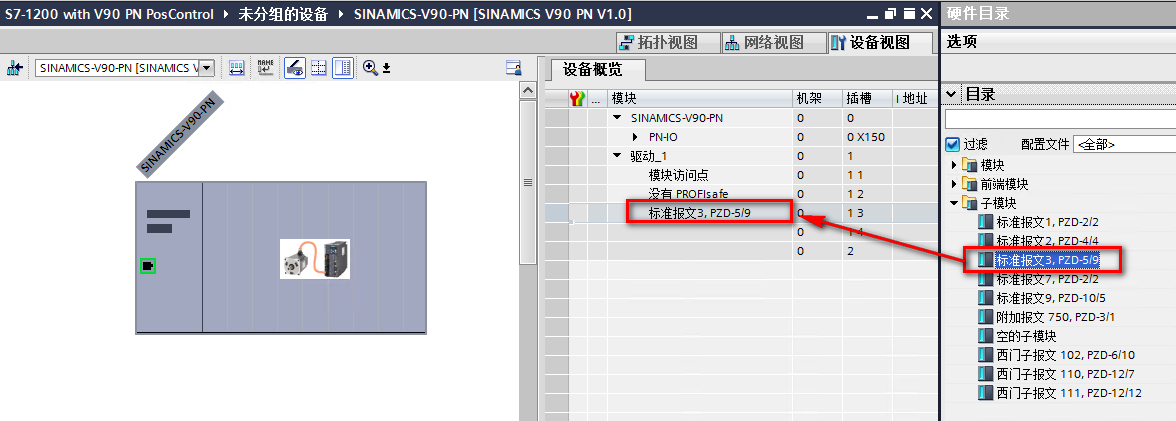
ͼ3-13 ѡ�������3
��̬��SINAMICS V90 PN ��S7-1200 CPU����Ҫ����SINAMICS V90 PN ��S7-1200 CPU��
1.��������ͼ������δ���䡱��ѡ��PLC_1.PROFINET�ӿ�_
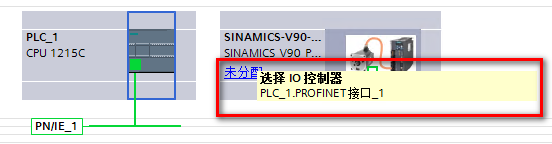
ͼ3-14 ѡ��PLC_1.PROFINET�ӿ�_
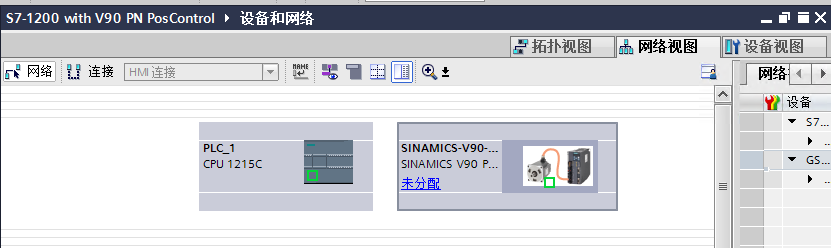
2.���Ӻ�������ͼ������ʾ��
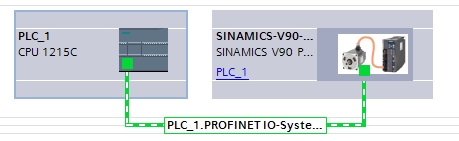
ͼ3-15 ������ͼ
3. Ȼ����������ͼ���Ҽ�����PROFINET����ΪSINAMICS V90 PN �������豸���ơ���
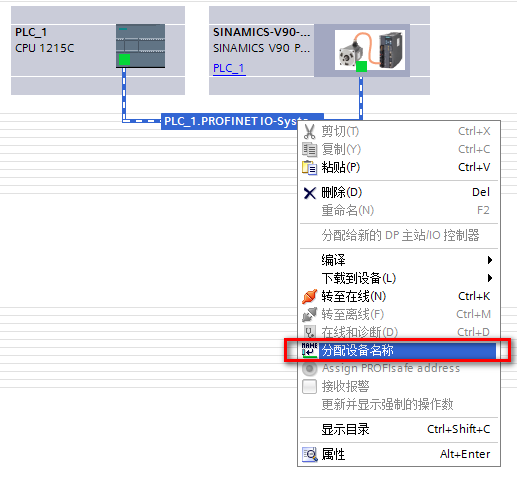
ͼ3-16 �����豸����1
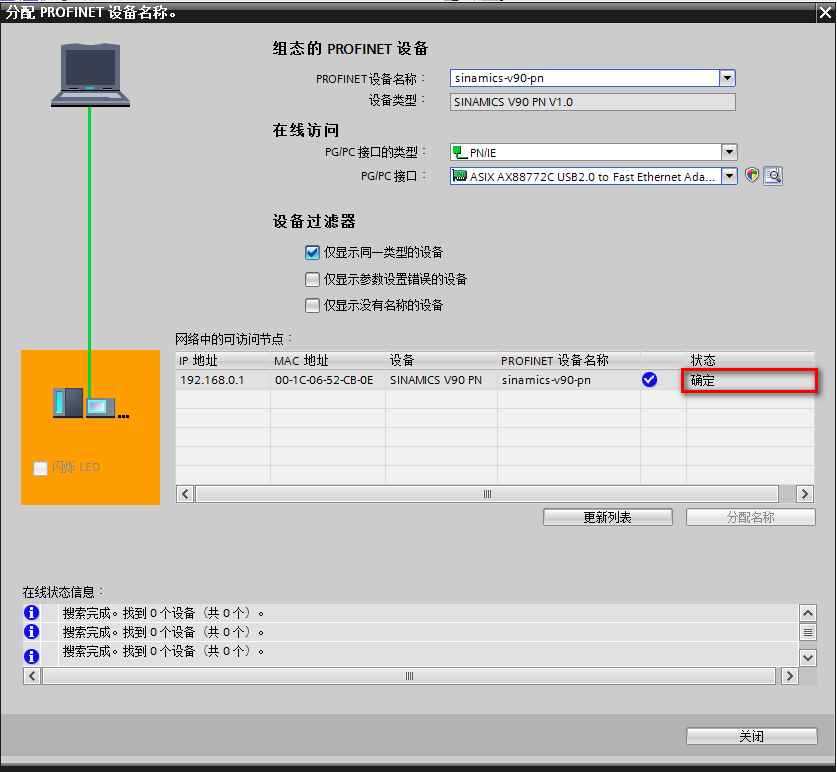
ͼ3-17 �����豸����2
ע��PROFINET�豸���Ʒdz���Ҫ��һ��Ҫȷ���豸���Ƶ���ȷ��
����ࡰ���ն������б���˫���������¶��������ڵ����ġ������������Ի�����ѡ����TO_PositioningAxis������Ϊ��������������Ȼ������ȷ������ť����һ���µĹ��ն���
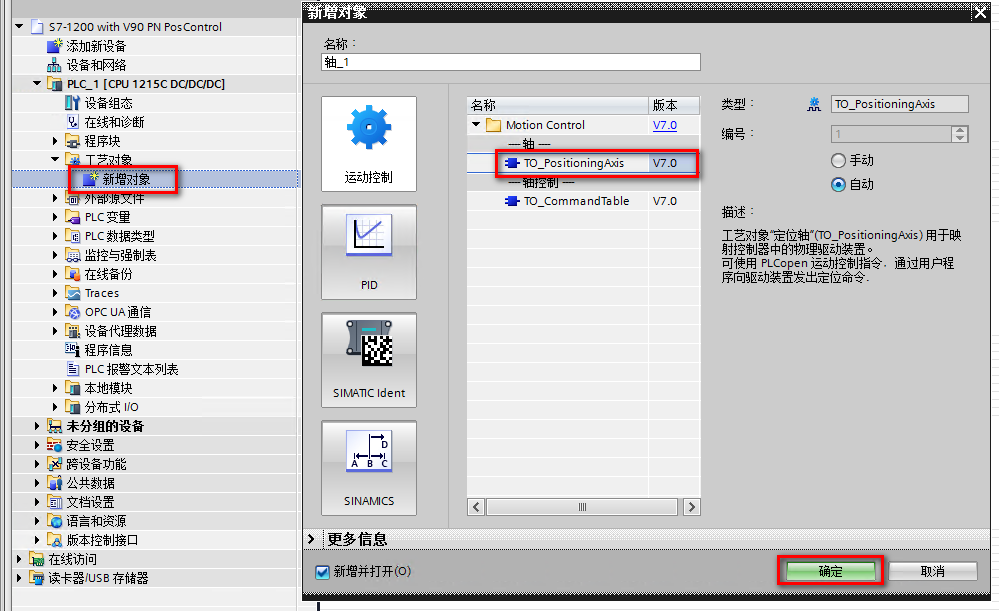
ͼ3-18 �����¶���
1.�ڡ������������ġ����桱ҳ���£�����Զ����ӵĹ��ն���������ƽ������á�
2.����������ѡ��PROFIdrive����
3.������λĬ��Ϊ mm������Դ������б���ѡ��������λ���� m��in��ft�������Լ��ȵȡ�

ͼ3-19 ������������
1.�ڡ�����������������������ҳ���£���Ҫѡ����������

ͼ3-20 ѡ��������
2.��ѡ��������������ݽ����IJ����������á���ѡ“����ʱ�Զ�Ӧ������ֵ�����ߣ�”������װ�ò���“�ο��ٶ�”��“����ٶ�”�ڹ��ն�����У����£���ʼ���������£���������װ�ú� CPU ��ͨ�����ߴ�������װ�ò�����CPU�� Ҳ����ѡ���ֶ��������²�����
ͼ3-21 ��������������
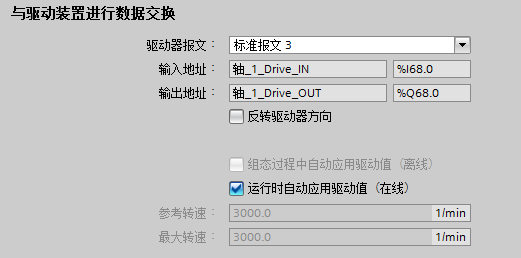
1.�ڻ��������ġ���������ҳ���У������������ӷ�ʽѡ��PROFINET/PROFIBUS�ϵı������������ڱ�����ѡ�����ѡ�������3��
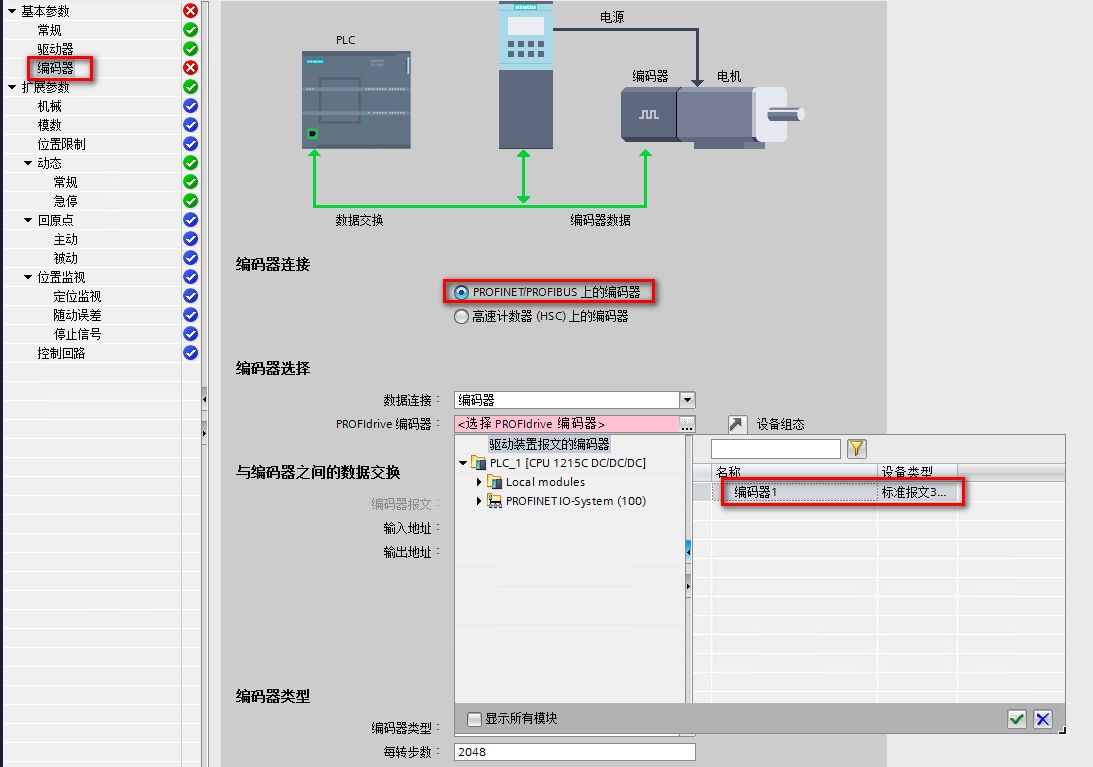
ͼ3-22 ������������ѡ��
2.��ѡ“����ʱ�Զ�Ӧ�ñ�����ֵ�����ߣ�”�������£���ʼ�����ն���ͣ����£������������� CPU �������ߴ��ͱ�����������CPU�������������ͱ���������̬�Լ�����װ����̬�е�������ͬ�������ı���������Ϊ“��ת����”��
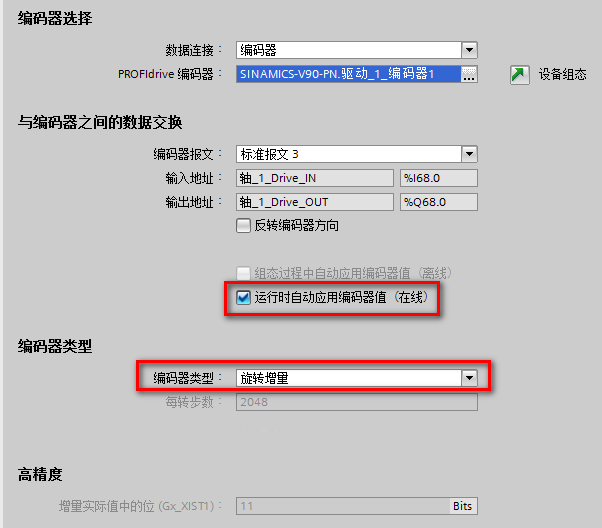
ͼ3-23 ѡ�����������
����չ�����£������������²�����
| ���� | ˵�� |
|---|---|
| ��е |
|
| ģ�� |
|
| ����� |
|
| ��̬ |
|
| ��ԭ�� |
|
| λ�ü��� |
|
| ���ƻ�· |
|
��3-1 ��չ����
���ն������չ���������������ο���
S7-1200����SINAMICS V90ʵ��λ�ñջ�����
https://support.industry.siemens.com/cs/cn/zh/view/109477411
���ն���һ�����̬������ο���
SIMATIC STEP 7 S7-1200 Motion Control V16
https://support.industry.siemens.com/cs/cn/zh/view/109773400
S7-1200 CPU �ڴ����ջ��˶����ƹ��ն���ʱ�����Զ��ش�������ִ�й��ն������֯�飬���� MC-Servo[OB91]����λ�ÿ������ļ��㣬MC-Interpolator[OB92]���������趨ֵ�������˶�����ָ���λ�ü�ع��ܡ���������֯��˴�֮����ֵ�Ƶ�ʹ�ϵʼ��Ϊ 1:1��MC-Servo[OB91]������ MC-Interpolator[OB92]֮ǰִ�С����Ը��ݿ���������ϵͳ��������ָ�� MC-Servo[OB91]��Ӧ��ѭ�������Ե���ʱ�䣬���ѭ��ʱ����̣��������� CPU ������������ CPU ͣ��������Ҽ� OB91 ��֯�飬�ڵ����� OB91 ���ԶԻ����п�������ѭ��ʱ�䡣�ɸ�����ʹ�õ������������˶�����Ӧ��ѭ�����˶�����Ӧ��ѭ��ʱ�� = 2 ms +��λ�ÿ���������� x 2 ms����
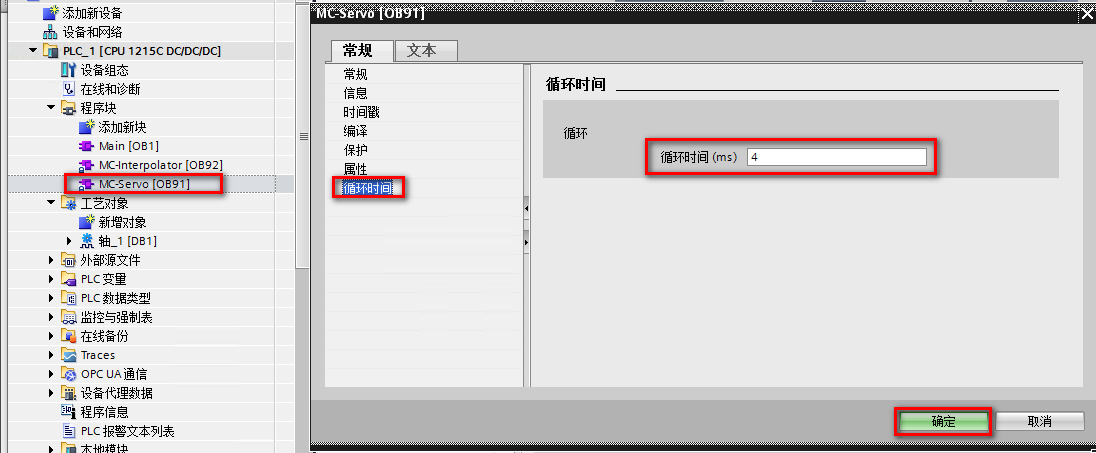
ͼ3-24 ��̬ѭ��ʱ��
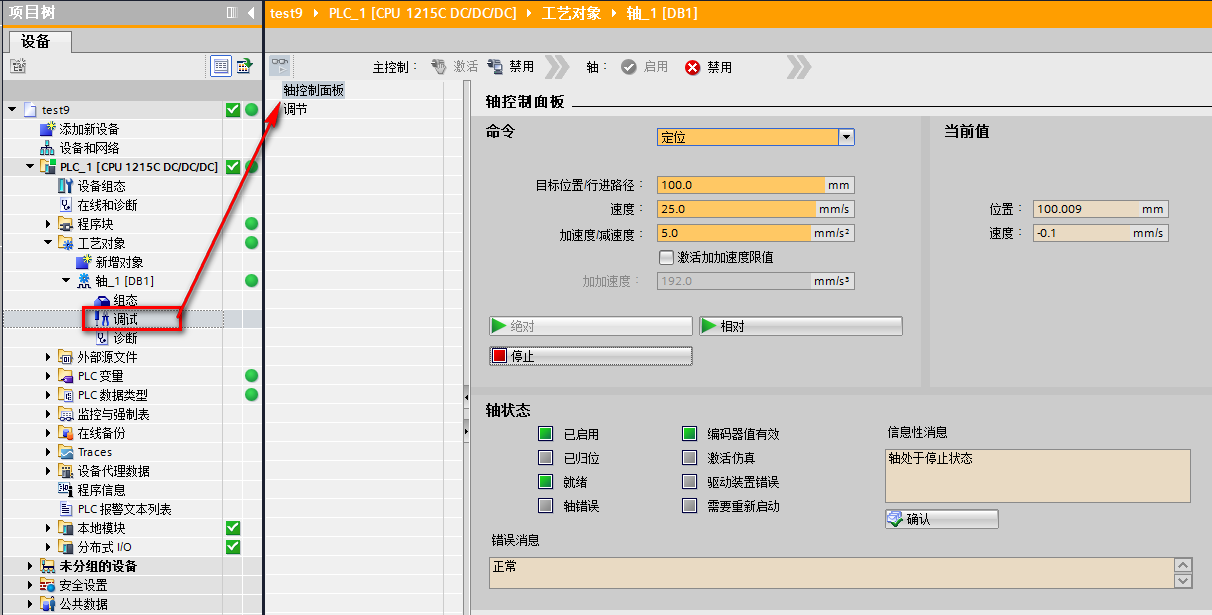
���벢����Ŀ���ص� S7-1200 CPU ���ɽ��е��ԡ�
����S7-1200��V90����̬�����Ѿ�������ɣ����Դ��ն���ĵ��Խ�����е��ԣ�Ȼ��Ϳ��Ա�д�˶����Ƴ����ˡ��˶����Ƴ���Ľ��ܿɲο������ĵ������ﲻ��������
���⣬�������廹�ṩ���ڹ��ܣ������ڵ���CPU λ�ÿ������������Ԥ����ֵ�������Լ���������й켣��
��CPU λ�ÿ�������Ԥ����ֵ���ֲ��������£���“����”������������̬���ƻ�·������ϵ������Ļ�еӲ��Խ�ߣ������õ�����ϵ����Խ�ϴ������ϵ�����Լ����涯��ʵ�ָ���Ķ�̬��Ӧ�����ǹ��������ϵ������ʹλ�ÿ���ϵͳ��
��CPU λ�ÿ����������汣�ֲ��������£���“Ԥ����”�����������Ŀ��ƻ�·���ٶ�Ԥ���ưٷֱȡ�
ͼ3-23 ��������
���Ľ���� CPU 1215C����V90 PNʵ�ֱջ��˶����ƽ����˼�������Ŀ����Ϊ���ܹ��ó��νӴ���ϵͳ���û��ܹ����ٵĽ�������ϵͳ����������� S7-1200�˶����Ƶ����Ӳ���ֲ�����ֲᡣ������ڸù��ܵ�ʹ����Ϣ��ο���SIMATIC STEP 7 S7-1200 Motion Control V16���ֲᡣ