Q1:SINA_POS怎样实现主动回零(带增量编码器V90,使用参考挡块+编码器零脉冲方式回零时),参考挡块回零开关接到哪里,怎样配置?
Q10:SINA_POS功能块中Control_table,ConfigEpos的定义是什么?
Q11:SINA_POS功能块中St_I_add和St_Q_add,Control_table、Status_table怎么填写?
![]() SINA_POS怎样实现主动回零(带增量编码器V90,使用参考挡块+编码器零脉冲方式回零时),参考挡块回零开关接到哪里,怎样配置?
SINA_POS怎样实现主动回零(带增量编码器V90,使用参考挡块+编码器零脉冲方式回零时),参考挡块回零开关接到哪里,怎样配置?
回零开关连接到一个PLC的数字量输入点,PLC内编程将其状态关联到SINA_POS功能块ConfigEPos输入引脚的bit6。
(1)将V90参数P29240设置为1(选择参考挡块+零脉冲方式回零);
(2)将回零开关连接到一个PLC的数字量输入点;
(3)在PLC内编程,将回零开关DI点的状态关联到SINA_POS功能块的ConfigEPos的bit6;
(4)FB284功能块选择工作模式ModPos=4;
(5)通过输入参数OverV、OverAcc、OverDec指定速度、加减速度的倍率(100%);
(6)运行方向由Positive 及 Negative决定;
(7)运行条件 "CancelTransing" 及 "IntermediateStop"必须设置为 "1",Jog1 及 Jog2 必须设置为 "0"。
(8)在 Control_table 中,将"ConfigEpos"bit0及bit1设置为 1
(9)驱动的运行命令EnableAxis=1
通过Execute 的上升沿触发回零运动。回零完成后Status_table中的AxisRef置1 。
主动回零运行模式变量赋值举例如下表:

![]() 硬件限位开关怎么接,怎样激活硬件限位功能
硬件限位开关怎么接,怎样激活硬件限位功能
• 如果使用了硬件限位开关,需要将在 Control_table 中,将ConfigEpos.%X3(POS_STW2.15 )置1,激活V90 PN的硬件限位功能。
• 正、负向的硬件限位开关可连接到V90 PN驱动器的定义为CWL、CCWL的DI点( DI1 至 DI4 )
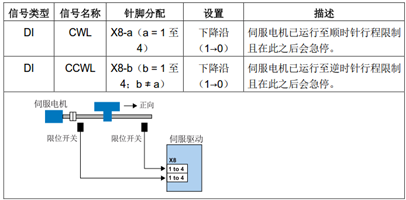
如果激活了硬件限位开关功能,只有在硬件限位开关信号为高电平时才能运行轴。
![]() 怎样激活软件限位功能
怎样激活软件限位功能
• 如果使用了软件限位开关,需要将在 Control_table 中,将ConfigEpos.%X2(POS_STW2.14 )置1,激活软件限位功能(p2582)。
• 在驱动中设置p2580(负向软限位位置)、p2581(正向软限位位置)
![]() 运行命令给出后轴不运行
运行命令给出后轴不运行
首先,检查输入信号CancelTransing,IntermediateStop是否设置为 "1", 除了点动之外的所有运行模式均有效,在运行EPOS时必须将其设置为 "1,设置说明如下:
• 设置CancelTransing=0,轴按最大减速度停止,丢弃工作数据,轴停止后可进行运行模式的切换。
• 设置IntermediateStop=0,使用当前应用的减速度值进行斜坡停车,不丢弃工作数据,如果重新再设置IntermediateStop=1后轴会继续运行,可理为轴的暂停。
• 检查输入参数OverV、OverAcc、OverDec指定速度、加减速度的倍率,为100%。
• 检查在 Control_table 中,是否已经将"ConfigEpos"bit0及bit1设置为 1。
![]() excute触发定位动作时90 PN无响应
excute触发定位动作时90 PN无响应
将ModePos模式切换与Execute动作触发不要在同一个PLC扫描周期内进行,ModPos切换到新模式后建议延迟10ms以上再触发Execute命令,在 Control_table 中,将"ConfigEpos"设置为 3。
并且动作触发Execute的高电平保持时间不能太短,建议保持10ms以上。
![]() V90 PN 为什么找不到111报文
V90 PN 为什么找不到111报文
需要使用V-Assistant软件把 V90 驱动器的控制模式设置为"基本位置控制(EPOS)",之后才可以设置111报文。
![]() 在博途中组态V90 PN时为什么找不到111报文
在博途中组态V90 PN时为什么找不到111报文
需要使用 V90的GSD文件组态,使用HSP组态找不到111报文。
![]() 怎样设置机械结构、减速比、模态轴,模态范围怎么设置
怎样设置机械结构、减速比、模态轴,模态范围怎么设置
需要使用V-Assistant软件,在“设置参数”中的“设置机械结构”画面中进行设置。
![]() EPOS 可以实现位置同步控制吗
EPOS 可以实现位置同步控制吗
不可以,只是实现单轴的定位控制,同步控制需要1500(T)+V90 PN组态工艺对象。
![]() SINA_POS功能块中Control_table,ConfigEpos的定义是什么
SINA_POS功能块中Control_table,ConfigEpos的定义是什么
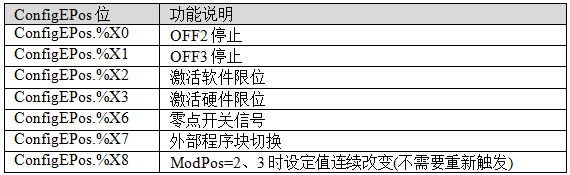
Control_table参数说明

ConfigEpos参数的定义:
![]() SINA_POS功能块中St_I_add和St_Q_add,Control_table、Status_table怎么填写
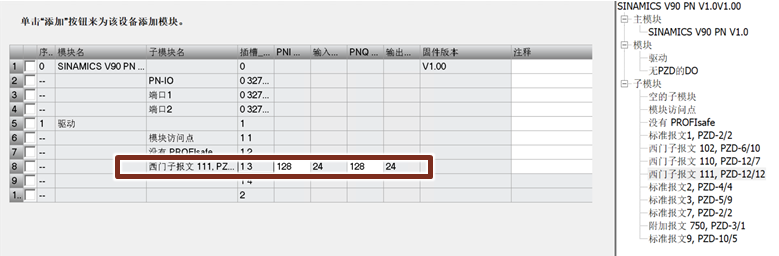
SINA_POS功能块中St_I_add和St_Q_add,Control_table、Status_table怎么填写
Control_table:此输入管脚应该填写Control_table 起始地址的指针,例如 &VD8000
Status_table:此输入管脚应该填写Status_table 起始地址的指针,例如 &VD7500
St_I_add:PROFINET 通信报文I 存储区起始地址的指针,例如 &IB128
St_Q_add:PROFINET 通信报文 Q 存储区起始地址的指针,例如 &QB128
可从下图中查看到:
![]() 绝对值编码器如何回零?
绝对值编码器如何回零?
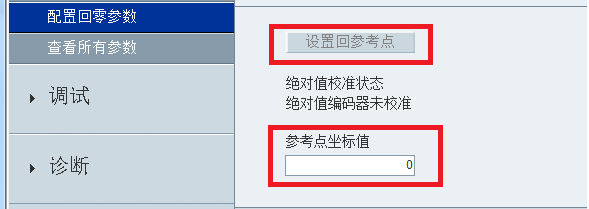
EPOS中绝对值编码器校准(3种方式):
(1) 通过V-ASSISTANT软件设置
(2). 通过BOP面板设置
可通过 BOP 功能菜单 "ABS"设置绝对值编码器的当前位置至零位。校准位置值在参数 p2599 中设置。设置零位后必须保存参数。
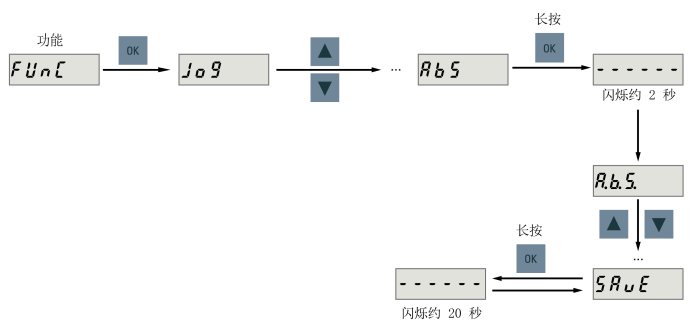
(3). 通过功能块FB38000(Absolute Encoder Adjustment) 编程实现
说明文档和库文件下载链接:https://support.industry.siemens.com/cs/ww/en/view/109760317
![]() SINA_POS 转速设置及实际值显示
SINA_POS 转速设置及实际值显示
假设负载转动一圈对应长度单位为默认设置10000(P29247),当前速度给定1000(*1000LU/min)(按照齿轮比1:1)
那么设定速度为:1000*1000/10000=100RPM
ActVelocity输出管脚显示为: 36126556
Actvelocity管脚显示为:36126556
实际速度值需要通过以下方算计算得到:
先将4000000H转化为十进制浮点数为1073741824.0,再将实际显示转速转换为浮点数后除以该值,然后乘以驱动中P2000的参考转速值即可(本例中P2000=3000.0RPM),也就是:
36126556.0/1073741824.0*3000.0=100.0RPM(约等于)
![]() 绝对值编码器掉电后位置丢失怎么办
绝对值编码器掉电后位置丢失怎么办
• EPOS模式下,掉电后如果单圈绝对值编码器电机移动超过了正负半圈,多圈绝对值编码器移动超过正负2048圈就会造成掉电后位置实际值丢失。
• 对于单圈绝对值编码器,可以按照以下方法设置虚拟多圈功能:
p29243 = 1激活位置跟踪功能,参数p29244设置虚拟多圈圈数,最大圈数可设置为2048,位置记忆范围为±1024圈,但需要注意的是掉电后单圈绝对值编码器电机移动不能超过正负半圈。
![]() EPOS模式下机械参数如何设置
EPOS模式下机械参数如何设置

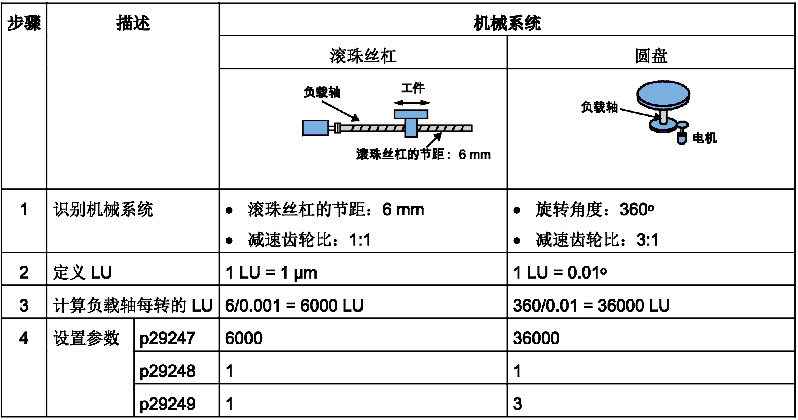
EPOS模式在驱动中的位置单位为(LU),所有的位置设定,相关速度值和加速度值以及加加速度值在EPOS模式中都以LU为单位。
P29247为负载每转的LU值,其可以自己定义。目的是让负载每转的位移单位与EPOS中的LU建立关系,例如:负载每转10mm,P29247设置为10000LU,也就是10mm=10000LU,那么设定1LU,负载会位移0.001mm(=1um)
相关参数:
