本着有始有终,负责任的态度,完成了以下测试。
实验软件 :STEP 7-MicroWIN SMART V2.5
实现硬件:ST60 V2.5
实验目的: 探究s7-200smart 运动控制的机制
我这边只提供一个参考方向。
PLC通过高速计数检测PLC所发的脉冲
I0.0 对应高速计数HC0
I0.1 对应STP
Q0.0 轴1脉冲输出
Q0.1模拟外部STP信号输出
详细见接线图

该实验主要涉及几个知识点,高数计数,轴运动控制,定时中断,立即输出
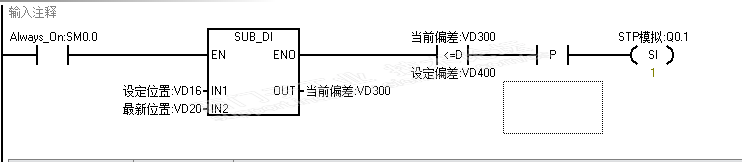
同时分享一个小技巧,由于SMART PLC没有TRACE功能,我们可以自己做一个.利用定时中断和数据指针,将要检测的数据存到一段V区,限制总的采集数量,通过设定的条件开始采集数据,然后把数据从状态表中拷贝出来进行分析,简单点可以导入EXCEL。
我这边分别验证了三个异常停车Abort,MOD_EN和STP的不同响应。基本方法,触发一个GOTO ,在定时中断中根据当前位置,提前给出三种不同停车。其中STP是通过立即输出Q0.1模拟实现。
实验结果:果然如论坛上其他帖子描述一样,Abort 和断MOD_EN都会出现脉冲多发的情况(停止时脉冲多于正常停车的脉冲),Abort要比MOD_EN多发的要多一些,而STP没有测试出多发的情况(可能测试次数和提前的距离,速度,加减速组合的样本还不足)并且三种情况,脉冲好像都没有真正立即停止,所以之前猜测并不成立。
由于对底层机制确实不知,所有只能在以后的应用中规避这种多发的问题。
大家也可以顺着我这个方向,继续挖掘,PLC底层的机制。
////////////////////////////////////////////////////////////////////////////////////////////////////////
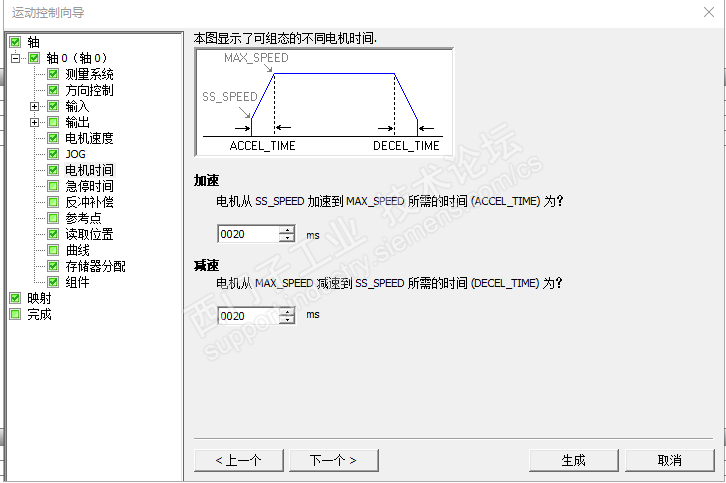
题外话:这个加减速时间最少好像只能设定20,不然PLC运行时会报组态错误。
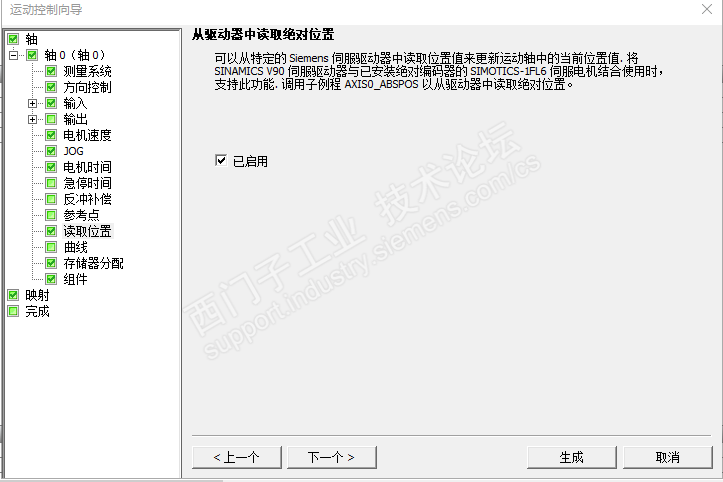
另一个分享一个小技巧,勾选读取位置,向导会多出一个AXIS0_RDPOS的子程序
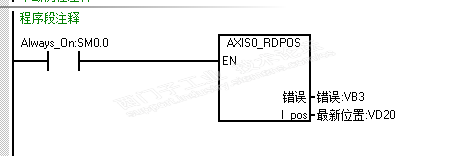
根据在1ms定时中断检测,发现即使以100KHz频率发脉冲,读到的值和HC0最多相差30个脉冲左右,所以在有些场合完全可以用AXIS0_RDPOS在定时中断中快速刷新轴当前位置。









 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国

 普通
普通


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐



















 短信登录
短信登录
