 变频器j绝对位置定位控制.rar
变频器j绝对位置定位控制.rar
运动控制的本质是速度、时间和位移三者之间的数学关系:
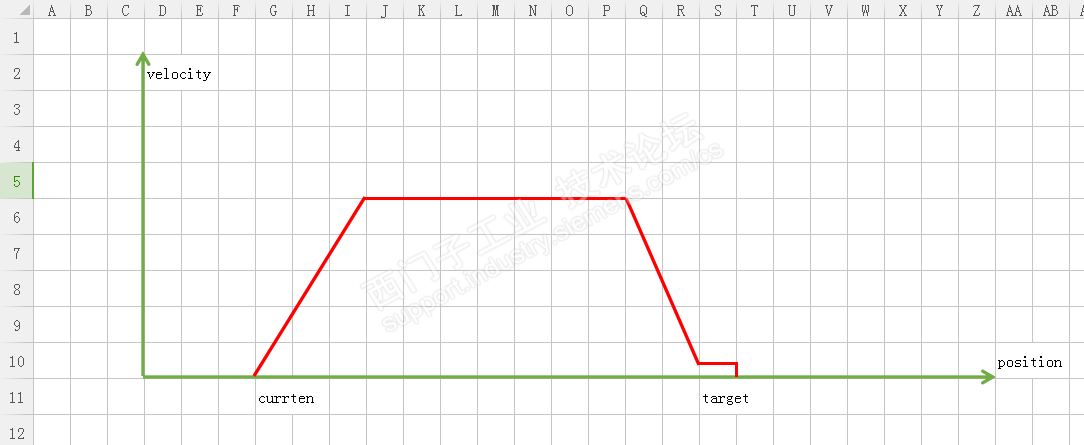
速度、时间和位移,我们只要知道这三者中的任意两者,利用数学公式就可求出第三者。速度和位移可以通过编码器测量,时间可以通过plc内部时钟获取,加速斜坡和减速斜坡时的位移也有相应的数学公式可利用,plc附带的库指令就是根据这些计算公式所做的集成块。
软件自带的运动控制库是“已经造好的轮子”,轮子一旦造好,使用它的时候必须按照它的规矩(接口连接方式、报文格式、硬件层如使用PTO控制还是使用总线控制或者模拟量控制?等……),所谓标准就是这个东西。而标准是被别人制定的,用户要使用这个标准就得被动接受,用得好不好就看用户对“标准”的理解是否契合了,当用户习惯200平台的这些标准,转而使用1500平台的标准,又得有一个摸索适应过程。
学习一种技术,不应该是只学习方法,而是理解原理。明白了原理,没有合适轮子可用的时候,自己可以造轮子。









 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国

 钻石
钻石


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐



















 短信登录
短信登录
