项目需求4轴点到点的精确定位控制(伺服电机),另有4台变频调速控制。
了解项目需求后,我首先考虑的是用通信,省接线,快速部署;以400W伺服驱动器+伺服电机的配置,带有STO、多圈绝对值编码器的松下A6 SF型
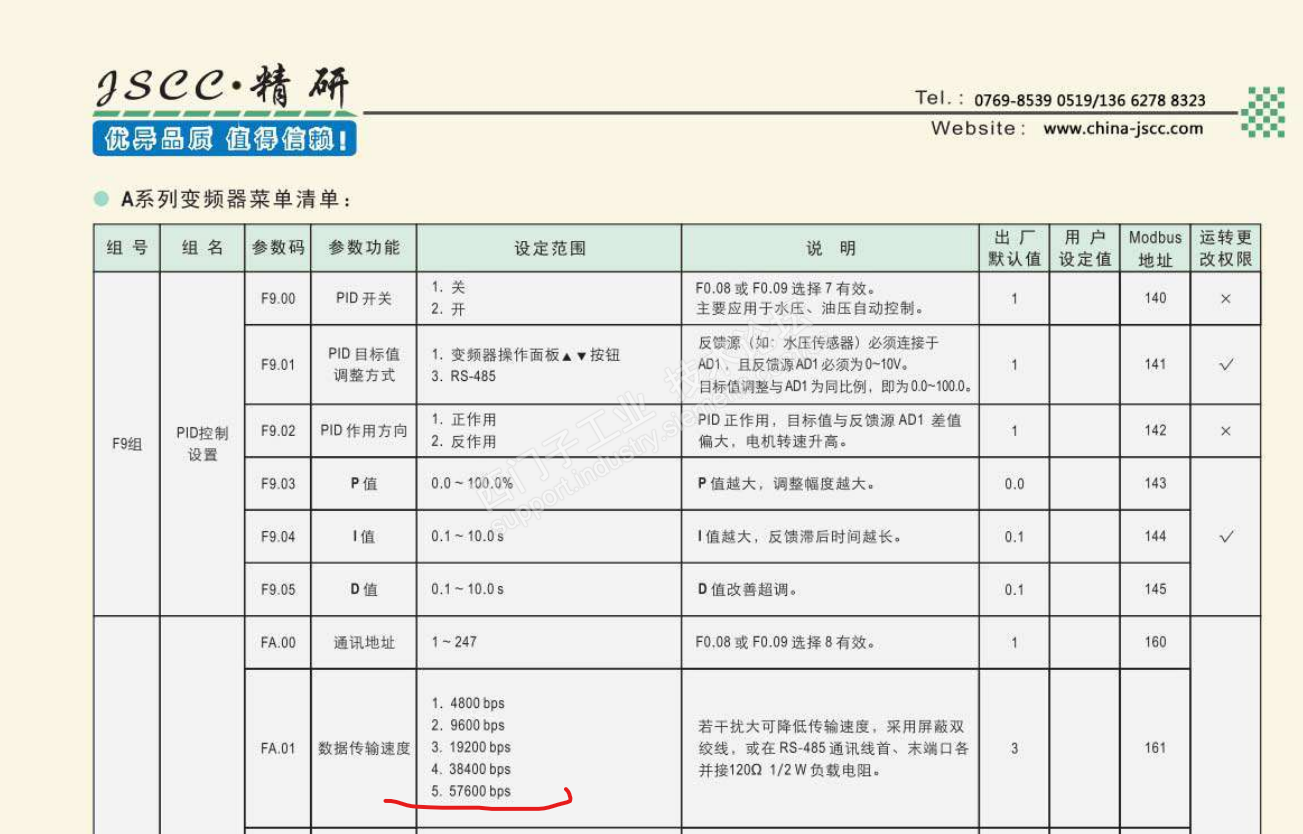
好多人说串口通信慢,那是相对于以太网通信而言的,实际上我这个项目5个从站16个轮询任务,一个轮询周期不会超过100ms,这还是为了迁就精研变频器的通信速率,如果只是用松下伺服,通信速率会再提高一倍,100ms,这对于点到点的运动控制足够了。
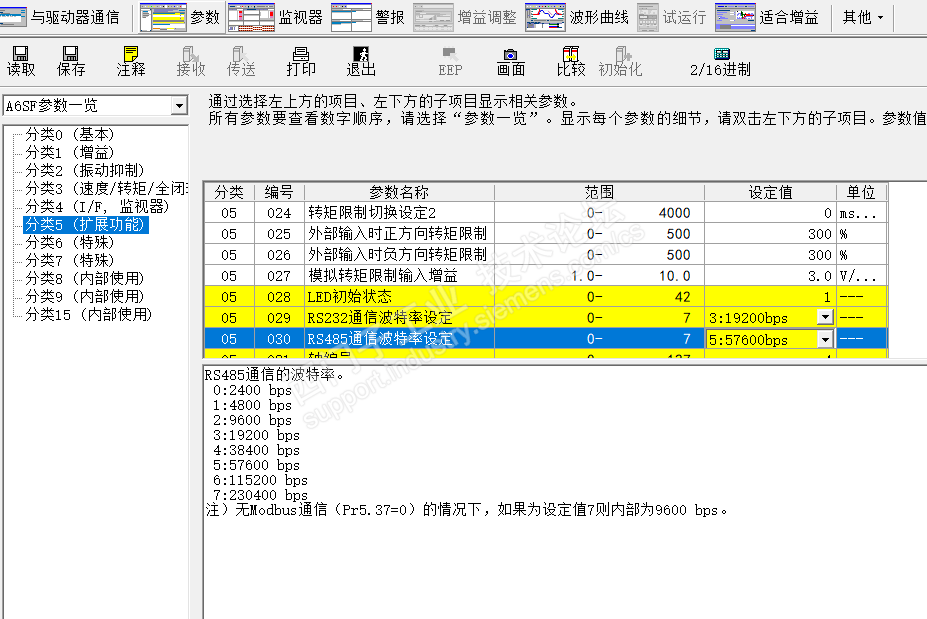
(因为精研的变频器通信速率最高只到57600,统一设置为57600bps)
很少有人说profibus DP慢,它的最低通信速率是187.5K,最快可以到12M,我这个项目能用到57.6K的通信速率,总比只能用9.6、19.2强多了。
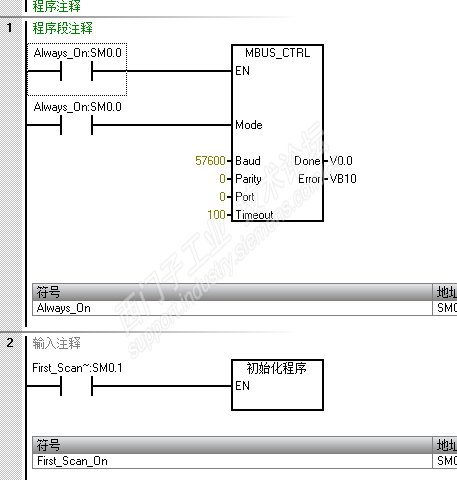
对应PLC通信程序设置:
现在说说松下A6的内置定位功能Block Motion:
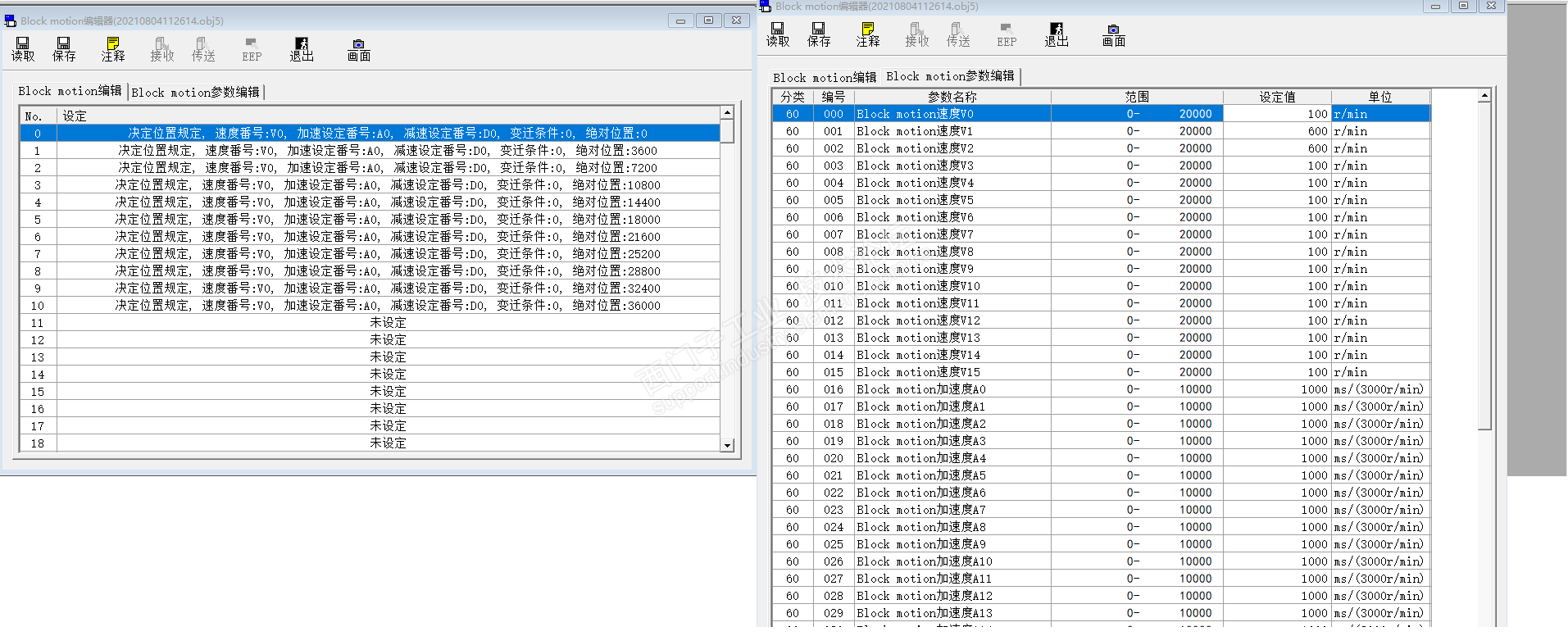
松下A6可以预先定义256条运动控制数据(绝对定位、相对定位、点动和速度控制、及等待),预定义10套速度、加减速,这些功能类似200smart运动向导里的“曲线”(profile)

一个200smart真是要存储了这么多定位数据,很怀疑内存够用不?松下的A6伺服把这部分功能集成到本体上了,除了可以通信调用block motion,还可以通过伺服驱动器的外部接口IF来调用预设运动曲线。
……下续









 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国
 钻石
钻石


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐




















 短信登录
短信登录
