| 作者 | 主题 |
|---|---|
|
锋言锋语 至圣 
经验值:23652 发帖数:3370 精华帖:52 |
楼主
主题:S120功能图的疑惑 
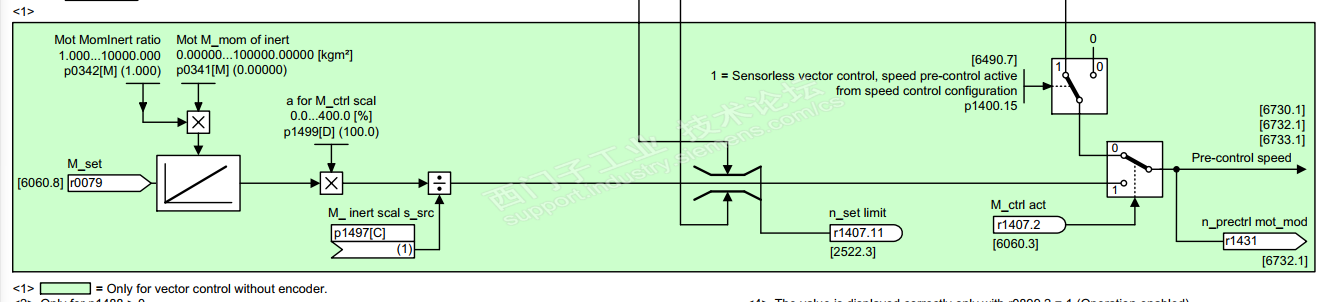
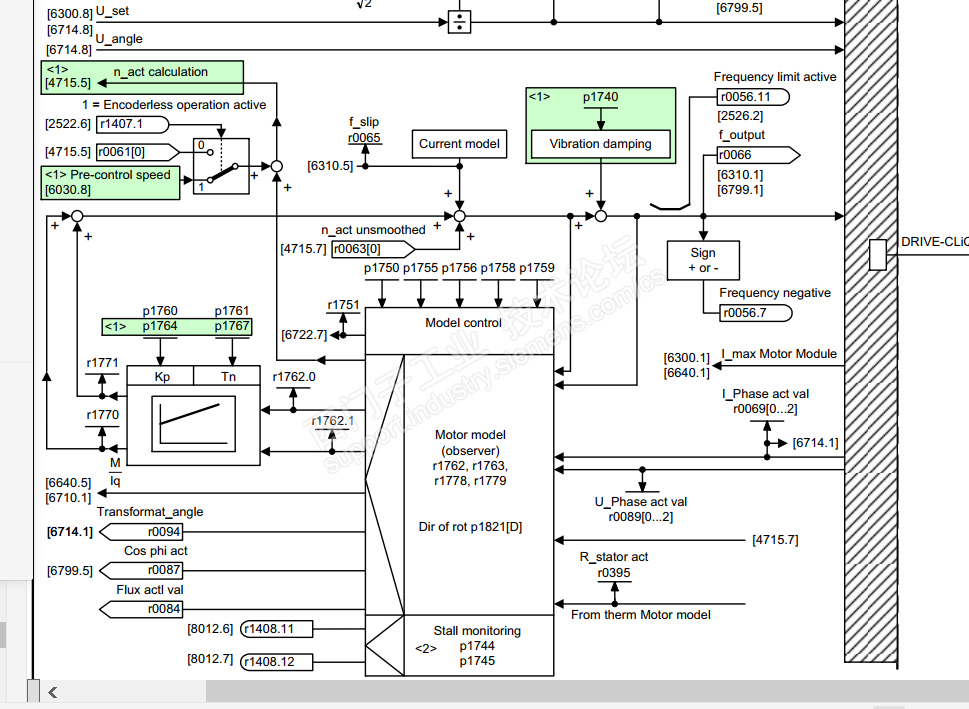
图1, 无编码器预控速度, 速度环时走滤波后给定, 转矩环走一个内部模型; 这个图,从表面上看,转矩模式时, 是转矩给定经过一个和系统惯量有关的积分环节, 生成预控速度;这里首先有一个疑问, 实际运行中,假设恒转矩负载, r79始终大于0, 这个积分器早晚饱和, 后面的限幅器也会饱和。 所以, 这么理解肯定是有问题的。 请大家指教? 这是问题1. 图2, 预控速度和一个 电机观测器的输出求和以后, 直接连接到无编码器时的r63[0]了。 这个我更疑惑了, 速度模式时, 预控速度是滤波后给定值, 怎么给定值也会参与计算速度? 而且对照G6030和G6031, 貌似G6030的这部分不太对劲, 图2左边的PI输出应该参与计算实际转速的。 请大佬指教。
不忘初心
|
|
yming 版主 经验值:126845 发帖数:21987 精华帖:824 |
7楼
主题:回复:S120功能图的疑惑预控和“动态补偿”是两码事儿哦、 这里的预控指的是前向通道。是说当给定发生变化时,因为已知系统惯量,所以将根据给定的变化,自动计算出需要的应补偿的转矩(输出电压)和转速(输出频率)。和闭环没有关系。 而后面的SLVC(无传感器矢量控制)闭环部分是当负载发生变化时,根据实际转矩电流矢量和已知电机模型参数,通过PI调节器直接实时控制输出(输出电压和频率); 这个PI调节器可以饱和,最大能力就是200%。真正输出值受到后面一系列的限制(最大电压、装置的、电机的最大电流;最大频率等等)。
学而时习之,不亦说乎?温故而知新,不亦乐乎?
|










 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城













 短信登录
短信登录
