| 作者 | 主题 |
|---|---|
|
yanney 游民 经验值:119 发帖数:1 精华帖:0 |
楼主
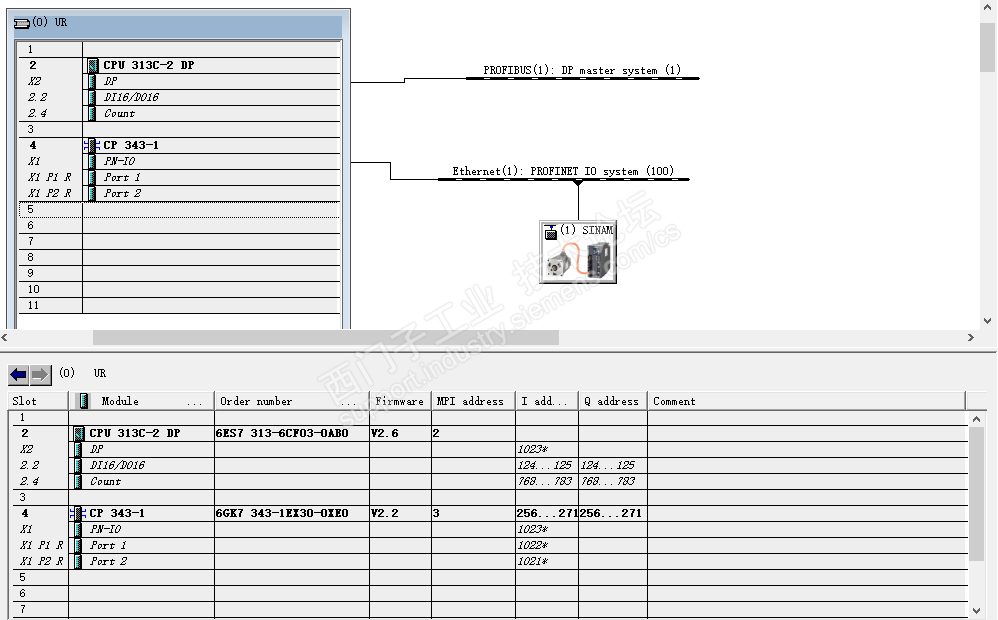
主题:S7-300通过CP343实现V90控制 V90通过CP343实现定位控制 S7-1500可通过FB284实现V90定位控制,带PN接口S7-300可通过FB283实现V90定位控制,不带PN接口CPU,可通过增加CP343 PN通讯模块,通过自编程序,实现V90定位控制。 硬件组态如下图所示:
如上图所示,S7-300通过111报文与V90通讯,所分配地址为I0.0-I23.7和Q0.0-Q23.7,输入输出各12个字。由于CP343模块功能所限,无法直接使用I、Q地址与V90控制器通讯,需通过特定功能程序块,将I、Q地址映射至内部变量,如下图所示:
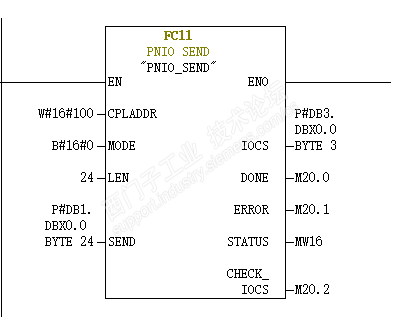
FC11、FC12为西门子程序库内标准程序,图中DB1、DB2即为映射后V90控制字和状态字,各接口定义如下: 1. CPLADDR:CP343模块地址,如下图所示:其中256 dec = 100 hex。
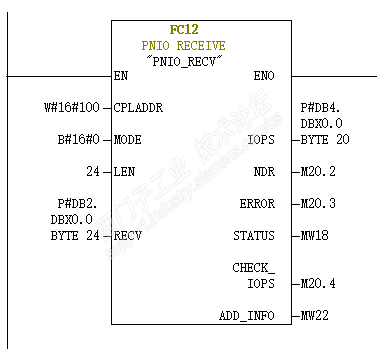
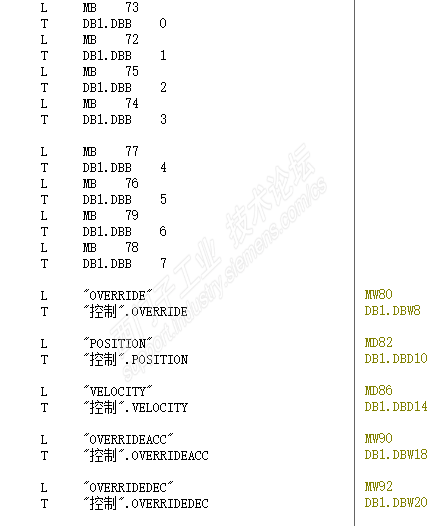
2. MODE:输入参数MODE = 0,因为CP343模块仅被使用了PROFINET IO设备。如果被同时用做PROFINET IO控制器和PROFINET IO设备,那么输入参数MODE = 1。 3. LEN:所需传输数据长度。 4. SEND、RECV:接收、发送数据所对应的地址,SEND数据区等同于V90所分配Q地址,RECV数据区等同于V90所分配I地址。 5. IOCS:每个位对应所传输数据长度一个字节,由于需要传输24个字节数据,所以该处为24个位。 6. DONE、NDR、ERROR和STATUS是通讯功能块的工作指示位置。如果发送任务成功完成,那么FC11“ PNIO_SEND”的“ DONE ”将被置位。如果接收任务成功完成(例如:数据被接收到),则FC12“ PNIO_RECV”的“ NDR”将被置位。 如果FC11“ PNIO_SEND”和FC12“ PNIO_RECV”由于错误而结束,则可通过状态字进行错误分析。 由于PLC地址与V90报文对应关系,需进行高低字节转换,如下图所示:
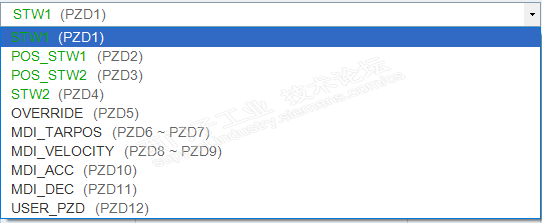
111报文控制字、状态字对应关系如下: 1. 控制字:用于控制驱动,报文顺序如下,其中PZD5为设定速率、PZD6-PZD7为设定位置、PZD8-PZD9为设定速度、PZD10为设定加速度、PZD11为设定减速度、PZD12为自定义,通过参数29151设置。
若要PLC控制驱动,STW1.10必须设置为1。 2. 状态字:反馈驱动状态,顺序如下,其中PZD6-PZD7为实际位置、PZD8-PZD9为实际速度、PZD10为故障代码、PZD11为警告代码、PZD12为自定义,可读取驱动扭矩或电流,通过参数29150设置。
3. 通过通讯及报文编程,即可完成S7-300通过CP343对V90控制器的控制。 |










 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城















 短信登录
短信登录
