| 作者 | 主题 |
|---|---|
|
黑嘿E 游民 经验值:70 发帖数:22 精华帖:0 |
楼主
主题:关于负荷平衡的理解! |
|
Robert 211 侠圣 经验值:2501 发帖数:1012 精华帖:41 |
3楼
 主题:回复:关于负荷平衡的理解!
主题:回复:关于负荷平衡的理解!
6月中旬, 我在SINAMICS论坛里发起过一次讨论, 针对各电机驱动之间的联接情况(柔性? 或是刚性?)以及负载的类型, 限于篇幅太长, 大体总结下来的方法有以下:
方案一:主机为速度控制,从机为力矩控制。主机将速度控制器输出的力矩值, 直接传递给从机作为其力矩给定, 无速度限幅。 ( 备注: 为了避免飞车现象,当从机的硬轴连接断裂时,应及时转化为速度控制; 或者使用自由功能块, 如果从机与主机的速度差超过限值+延时, 从机OFF2停机。) 方案二:主机为速度控制,从机也为速度控制。主机将速度控制器输出的力矩值,传递给从机作为其力矩限幅。从机的速度给定略大于主机 (通常大于约2~5%),使其速度环达到饱和。 方案三:主机为速度控制,从机也为速度控制。主机将速度控制器输出的积分量,传递给从机速度控制器作为其积分控制的设定值, 并且从机自己的积分功能取消。 方案四:从机速度环的力矩值减去主机速度环的力矩值,该力矩差值乘上相应的软化系数之后, 负叠加在从机的速度给定上进行控制。 方案五:从机以主机的速度信号作为基准,同时采集主机的电流信号和自己的电流信号进行PID调节,PID的输出乘以一个系数后叠加在自己的速度给定上加以控制。 方案六:电机驱动无主从之分, 均为速度控制, 读取各驱动的实际电流值, 然后算出电流平均值。如果实际电流值大, 那么它的速度附加给定就为-Δn; 如果实际电流值小, 那么它的速度附加给定就为+Δn。 方案七:电机驱动无主从之分, 均为速度控制, 每台驱动都有自己的速度环软化( Droop Compensation ) 。 |
|
小皮 侠圣 经验值:3984 发帖数:1398 精华帖:85 |
6楼
主题:回复:关于负荷平衡的理解!
我看归结起来负荷平衡就两种方法,1直接控制从机转矩,2从机速度加负荷平衡调节器。
还有一种不调的,靠电机机械特性自己平衡,如rober211的方案7。 每种方法都有不同的实现手段,就像rober211总结的。他们适用于不同的设备,一般硬连接轴适用直接控制转矩,软连接或没用直接连接的机械用负荷平衡调节器附加速度方式。 楼主应用的plc读取电流值、加速度微调量的方式,也适用于软连接方式,因为1网络速度一般较慢 2又经过内部计算,3最后再由给定通道加偏差。这3者都会影响响应的速度。如果需要快速不如将电流传至装置内部由装置计算偏差量直接附加在速调输入,这样只有网络速度影响。或者采用rober211的方案1。 方案2 对负转矩传输需要认真考虑,(附加速度方向,限幅如何加等)。一不小心就会错,慎重使用! |
|
Robert 211 侠圣 经验值:2501 发帖数:1012 精华帖:41 |
19楼
主题:回复:关于负荷平衡的理解!
方案3,我觉得很蹊跷。主和从的积分是一样的,那P值呢?主的和从的一样吗?如果不一样,时间常数还是不同的呀,搞不懂这种负荷分配的工作原理。
---- 方案3是个很有趣的应用, 负荷分配的驱动组中每台电机功率是不一样的! 比如说, 轧钢线的酸洗段张紧辊系有4个传动辊子, 从前到后分别为 200KW, 160KW, 200KW, 250KW。带钢建立张力之后, 就开始使用方案3的负荷分配。 每台电机驱动的积分量%百分比是完全一样, 但是积分量绝对值是不同的, 电机驱动之间的转矩差值就是带钢需要的张力; 每台电机驱动有自己的P调节, 对自己的速度偏差可以微调, 因为速度环输出的力矩中积分量是主要的(实际观察约占95%以上)。 |
|
Robert 211 侠圣 经验值:2501 发帖数:1012 精华帖:41 |
22楼
主题:回复:关于负荷平衡的理解!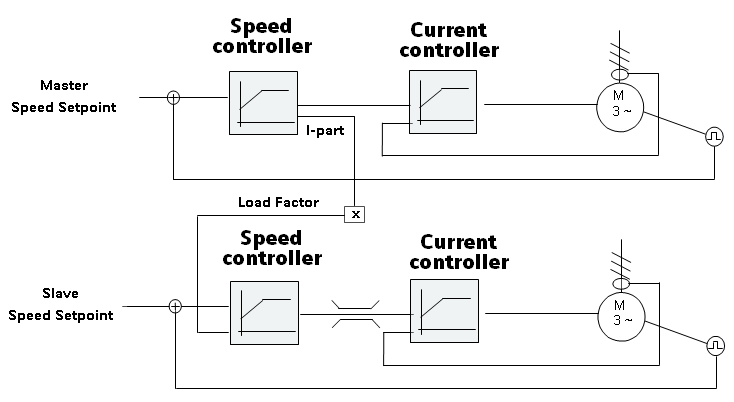 方案3,大家别想的太复杂啦。 简单地说, 主机将速度控制器输出的积分量,传递给从机速度控制器作为其积分控制的设定值, 从机自己的积分功能取消。 |
|
Robert 211 侠圣 经验值:2501 发帖数:1012 精华帖:41 |
25楼
主题:回复:关于负荷平衡的理解!
再问下,上图中Master和Slave的设定源是同一个吗?
---- Master和Slave的速度设定来源于PLC或TDC, 按照一定的速度链关系, 比如, Master : Slave= 1: 1.05 速度链关系由工艺来确定! |
|
Zane 至圣 经验值:76197 发帖数:19330 精华帖:377 |
27楼
主题:回复:关于负荷平衡的理解!quote:以下是引用kdrjl在2012-09-07 22:43:45的发言: 很好。其实负荷分配的“方案三”,由三个精华帖基本描述完整了。总结起来,应该是:按比例分配给定转速;同时加减速且斜率一致。有点像“拔河比赛”,要“使劲”就大家一起“使劲”,不管能力大小。真的很有趣。 严格的速度链同步的前提是每个轴的特性要比较硬,而且在动态过程中(升降速过程中),负荷不是按需分配的,尤其是在每个轴有自己的斜坡,另外有个总的速度斜坡,斜坡越陡,瞬间负荷分配越不均匀。 所以,负荷分配采用速度链方式是不适合的,应该是选取适当的轴做速度控制,作为系统的基速,其他采用转矩跟随的方式,
Zane
注册自动化系统工程师
Always save before download
|
|
Zane 至圣 经验值:76197 发帖数:19330 精华帖:377 |
28楼
主题:回复:关于负荷平衡的理解!quote:以下是引用Robert 211在2012-09-03 13:36:38的发言: 我对方案7,存有疑虑。这种控制要求的是两电机同步?那自己Droop自己,何来同步?好像没什么意义吧?因为两电机既不同轴,也不分主从,那控制什么?不就是自己控制自己吗?Droop不Droop有意义吗? ----- 在港口或煤矿的皮带输送机, 通常有头部驱动和尾部驱动从两端来拖动很长的皮带, 两台电机驱动通过长皮带"柔性联接"。那么, 电机驱动之间无主从之分, 均为速度控制, 每台驱动都有自己的速度环软化( Droop Compensation ) 。很多项目上的皮带输送机, 调试之后的转矩分配效果很好! 这是动态的平衡,严格的意义上说,两头的线速度并不相同,这个应用本来对线速度的要求就不高。
Zane
注册自动化系统工程师
Always save before download
|










 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城













 短信登录
短信登录
