| 作者 | 主题 |
|---|---|
|
永乐一夏 侠士 经验值:1203 发帖数:61 精华帖:3 |
楼主
主题:原创分享-PLC参与控制机器人夹爪的安全打开逻辑 跟大家分享下我上个月的关于PLC参与控制的机器人夹爪安全改善,有同样应用的西友门可以参考下
安全风险背景是这样的: 现场有好多Durr机器人工位,机器人的夹爪用的是雄克气缸式,夹爪靠压缩空气打开,断气后通过内部弹簧夹紧,相信大家都用到过,夹爪的打开/关闭命令都是来自于机器人,机器人程序负责判断是否应该夹紧/松开,将命令传递给PLC,PLC收到后直接控制电磁阀打开/关闭,PLC是不对机器人信号进行判断的,直接进行输出。
另外就是在手动操作打开/关闭机器人夹爪时,需要先按下快捷键III通入压缩空气,再执行相应程序打开/关闭夹爪,就是在这里存在一定安全风险: 第一:维修人员进入工位内部移动调整机器人位置时,此时机器人选择在手动模式,在机器人上使能运行程序打开夹爪后,此时一旦错误地忘记执行夹爪关闭程序,而是通过断开机器人使能,关断主气阀从而使夹爪自行夹紧工件,当再次上使能,主气阀打开后,由于夹爪未执行关闭程序,因而夹爪会直接打开,工件会直接掉落。 第二:当夹爪原本松开无件情况下,手动抓取工件,此时也执行了夹爪关闭程序,但是调试完毕后,未将工件放回轨道,夹爪上仍然带件,因为夹爪上之前没有工件记忆,因此HMI面板上是有打开夹爪使能的,当设备报警夹爪与记忆不一致时,操作工以为夹爪上没有工件便手动从HMI上打开夹爪消除报警,工件掉落,导致砸伤维修操作人员,存在重大安全风险。
分析过程是这样的: 由于夹爪在断气情况下内部弹簧会夹紧,导致实际夹爪也关闭,但是此时机器人并没有执行夹爪关闭程序,do_Gripper_Open信号仍然置位,机器人夹爪打开换向阀仍然得电,此时一旦操作人员按下快捷键III打开主气阀,夹爪就会通气打开,导致工件掉落。比如,操作人员在机器人手动Motor On后,执行程序打开夹爪,但是在Motor Off后,由于夹爪断气内部弹簧复位夹紧工件,由于没有执行夹爪关闭程序,当再次Motor On,通入压缩空气后,夹爪就会直接打开,造成工件掉落。
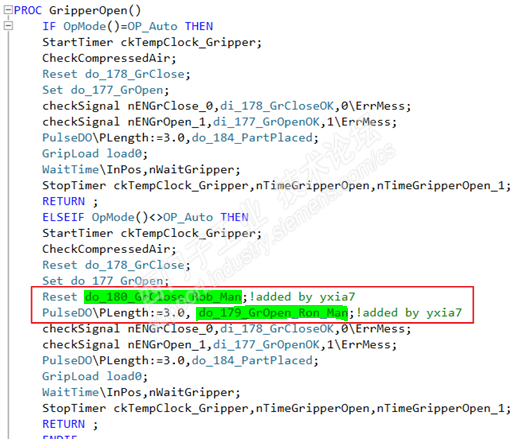
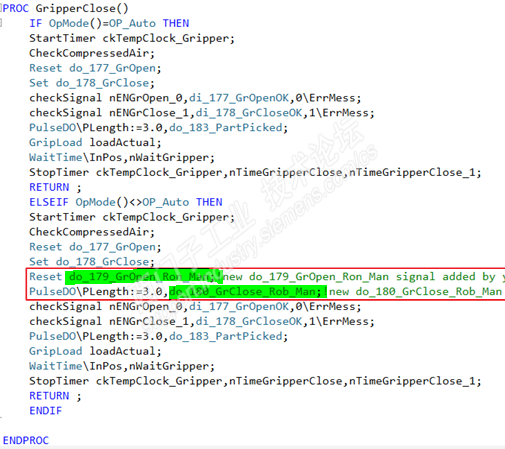
因此,机器人程序中在夹爪打开程序进行判断,如果是自动模式下进行打开,保持和原位一样的逻辑,如果是在手动模式下,机器人打开/关闭动作均是以脉冲形式输出,且在机器人Motor off后,夹爪会自动关闭,下次在开启主气源后也不会自动打开,保证安全。
因为上述的这种情况是可能存在人为错误操作的可能性,比如,手动运行了夹爪打开程序,但是忘记运行了夹爪关闭程序,只是通过断开机器人使能来使夹爪关闭,当第二次上使能后,夹爪就会打开造成工件掉落。 因此1.当机器人手动模式下,一旦断开使能后,PLC将夹爪打开的换向阀切断是十分必要的。 2.同时将HMI打开夹爪的条件去掉,即不能在面板上打开夹爪,只能通过机器人示教器打开,因为从示教器打开夹爪是最安全的,可以最大程度保证操作的安全性。 3.另外,当机床开门后,HMI面板会请求操作人员确认夹爪安全状态,只有确认安全的情况下,夹爪才能打开。
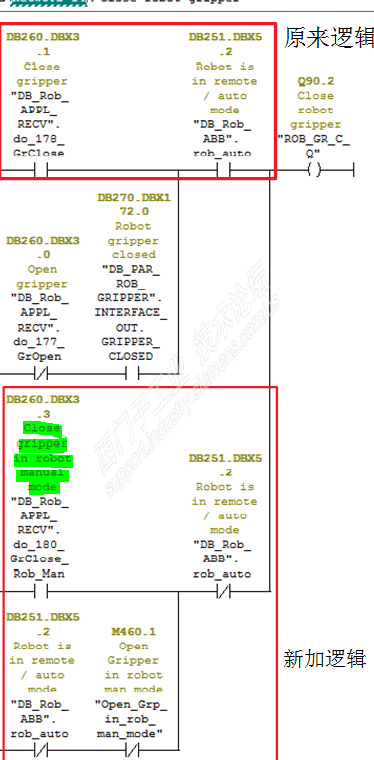
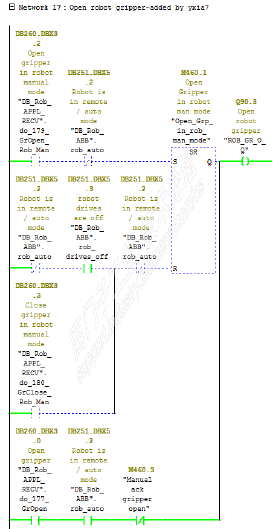
改善过程: 逻辑更改:(一)PLC处: 1.新增手动夹紧松开控制点,当手动情况下可以正常关闭夹爪
手动情况下,通过机器人传递的脉冲信号开控制夹爪打开,一旦松开使能夹爪便会夹紧,再次上使能后也不会打开
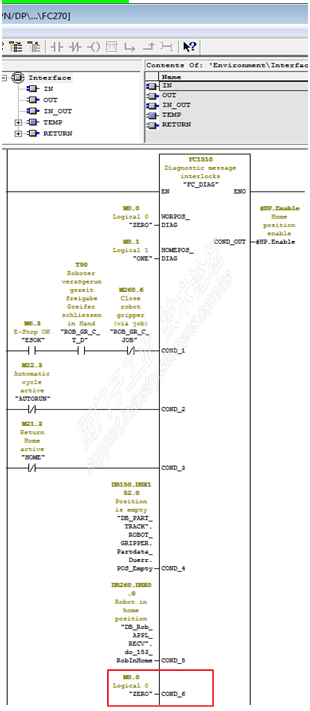
2.隐去HMI打开夹爪使能
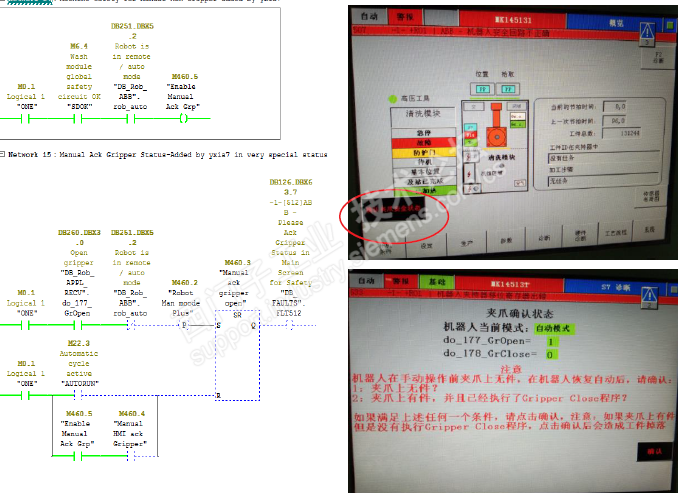
3.画面确认夹爪安全
(二)机器人处: 自动情况和原来保持一致,手动情况下夹爪打开和关闭均采用脉冲输出。
通过这样的改动,可以保证最大程度上夹爪打开过程的安全,各位有相似应用的西友门可以参考下
做真实的自己
|










 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城













 短信登录
短信登录
