| 作者 | 主题 |
|---|---|
|
yming 版主 
经验值:126844 发帖数:21987 精华帖:824 |
楼主
主题:《为啥PID闭环控制,通常不使用微分环节》 
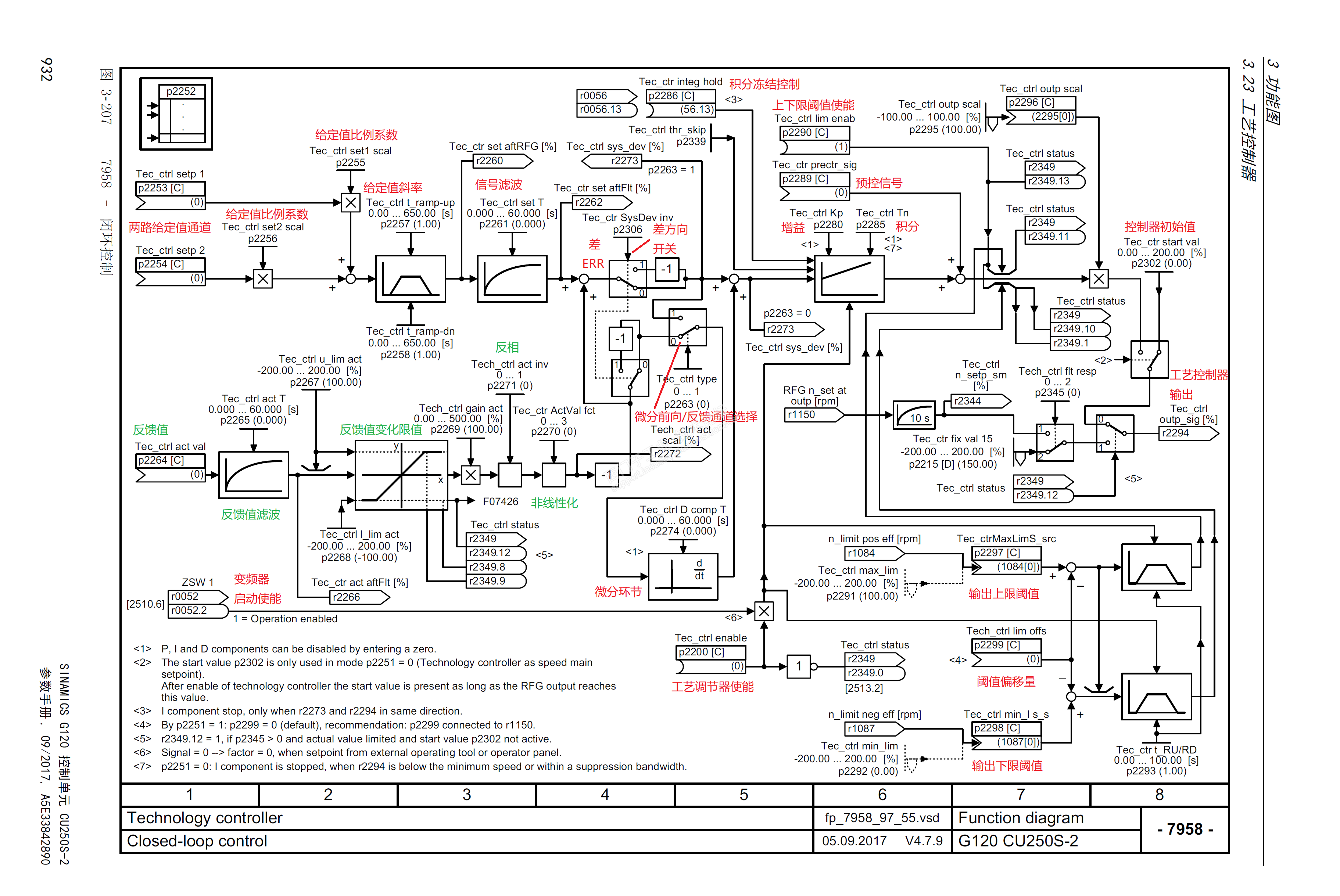
在自动化控制中,我们经常使用PID功能,但是大多数仅使用PI(增益+积分)功能,很少使用微分的功能。 为什么呢? 我试着从时域的角度来解释一下: 先说一下西门子驱动。 在大多数的通用型以上的(非简易的)驱动中,都给了你一套工艺调节器(你用不用,它也在那里!) 它是独立存在的。(你有7台变频器,那就有7套工艺控制器在那里放着。) 这个工艺控制器就是一套完整的PID控制系统。有两路输入、滤波、斜率、对差不同的处理,对微分的通道处理、增益、积分、输出上下限的设置、偏移等等。 你既可以用它做传动系统的调节,也可以做对驱动的微调(加入到主控回路中)。 还可以作为实验观测器,来检查你的控制调节系统的动作! 下面展示的是G120的(S120,从前的MM440/430 都有)
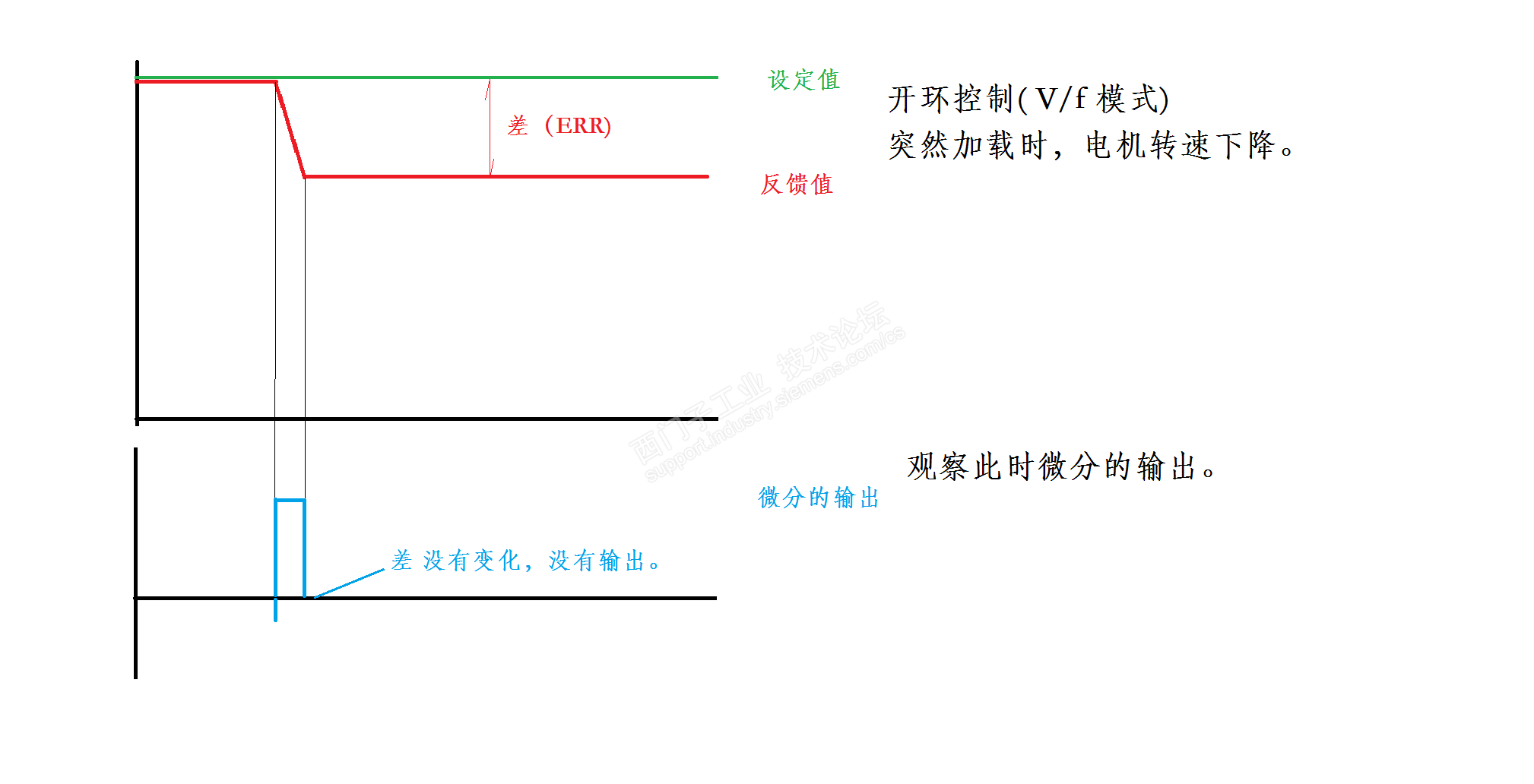
我们可以用它来观察 PID调节器的各元件作用。 如果对此工艺调节器的输入,BiCo到变频器主控系统的对应端,输出不连接任何实际控制对象。那么就能观察到这些元件的动作。 首先,如果驱动使用开环控制,我们知道,电机空载时,转速=设定转速,当突然加载额定负载时,V/f模式下,转速急剧下降,负载不变,该转速稳定在某值不变。 因为,微分仅对差的变化有输出,此时的微分功能输出如下图:
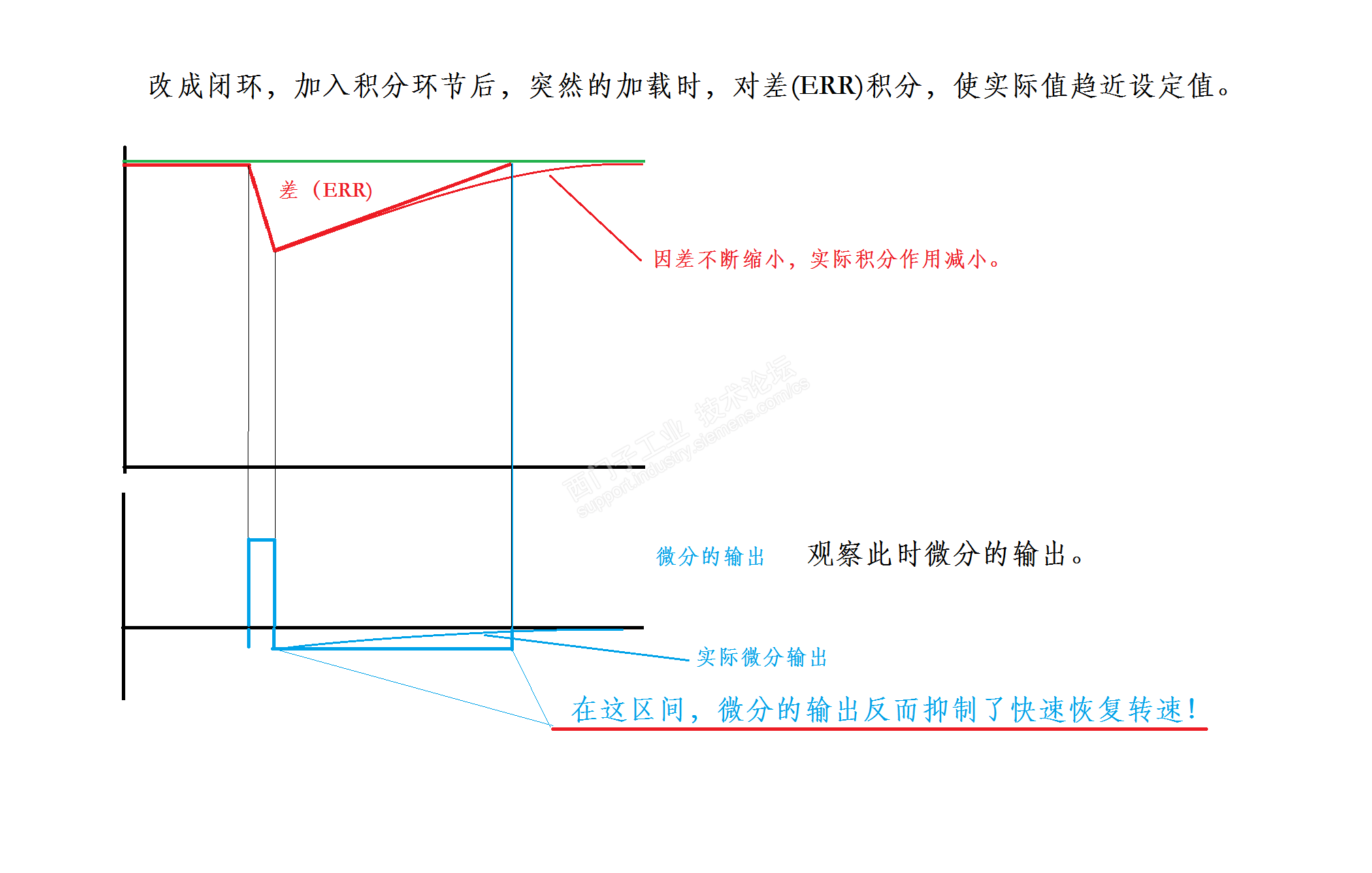
这,这,这微分作用的时间也太短了吧? 好吧,我们将主控改成闭环,加入增益、积分的PI控制。 这时控制系统成为一个无差系统,在积分器的作用下,实际值终将=设定值。 此时,看看微分的作用!
我擦,你、你、你这微分在主控调节恢复到设定值区间,没起好作用呀。不但没有能加快响应,反而是在“拖后腿”! 所以说,书上的 ” 斜率微分负责对变化趋势斜率做预测响应并反映在输出端。“ 不一定是好事儿。 这就是前向通道通常不使用微分的原因。(所以在矢量控制中,干脆取消了这个微分环节。)
学而时习之,不亦说乎?温故而知新,不亦乐乎?
|
|
锋言锋语 至圣 经验值:23652 发帖数:3370 精华帖:52 |
4楼
主题:回复:《为啥PID闭环控制,通常不使用微分环节》我稍微有点不同意见。 微分一般实现为一个实用环节, 微分输出实际上都是串联一个惯性环节一起用的。, 这样, 就能避免冲击型负载瞬间大,持续时间短的问题。 微分的作用是 加快响应, 减少超调。 必须和PI进行配合。 抑制快速恢复, 有点偏颇啊。 有的场合对控制超调要求高, 就可以适当考虑微分环节。 传动, 快速响应要求高,, 就可以考虑少加或者不加。
不忘初心
|
|
kdrjl 版主 经验值:136348 发帖数:34911 精华帖:435 |
11楼
主题:回复:《为啥PID闭环控制,通常不使用微分环节》问题就在你的最后一句话。如果不实践,你能正确认识吗?在我们那一代,所受的教育是: 人的正确思想是从哪里来的?是从天上掉下来的吗?是人头脑里固有的吗?no!人的正确思想,只能从实践中来! 你不实践,怎么能认识理论的正确性?你不实践,只能把自己的认识停留在书本上。这也正是问问题喜欢自己意念。也正是因为你的提问,才发现有必要告诉踏入专业技术门槛里的人,应该如何自我学习,自我实践去认识和提高自己的专业水平。 在提问中,在交流中,我们更注重对问题的解析方法。不是意念的去冥思苦想,而是去试验,通过实际验证它的规律性,以提高对书本知识的感性认识到更高一级的理性认识。 在没有实践下的书本知识,就作为真理去指导自己的行动,那是本本主义,也叫教条主义;而在没有理论指导下的实践,就作为真理去指导一般,那是经验主义。这两种情况都是极端的,在工作中这么做,不会有进步。 仅此而已。
我是你的朋友
|
|
holdkcsxyz 至圣 经验值:13006 发帖数:1813 精华帖:22 |
13楼
主题:回复:《为啥PID闭环控制,通常不使用微分环节》感谢版主的分享,几张图片很形象的解释了理想微分的作用。 “正负阶跃式(一些复杂的扰动可以类比成变形的正负阶跃扰动比如类正弦扰动)的扰动信号要经过大于等于二阶有积分环节后得到有效抑制。 若上上次有一定量的正扰动,上次有一定量的负扰动则二阶以上的积分作用就能让正负累加抵消一小部分扰动从而在得出相对合理的模型输出;总体上大于等于二阶以上的积分环节能消除一部分震荡扰动,使系统趋于稳态。 放大比例负责对本次差值量做出放大响应并反映在输出端。 位置积分负责对历史累计量做出累加响应并反映在输出端。 斜率微分负责对变化趋势斜率做预测响应并反映在输出端。” 以上文字是我回复上个帖子根据简单的应用经验随意敲得,没有背书,如有雷同,不胜巧合,呵呵。 我的观点是微分作用非常重要,重要到几乎所有调节都或多或少用到微分作用,当然大多数不是纯微分环节,多数是带延迟或带权重的不完全微分。在版主举得稍刚性的调节场合纯微分可能是不太合适的,很多PID环节不用D原因是已经把D作用前置到对输入信号的滤波环节了。这时微分作用尤其是纯微分作用就不适宜加入对偏差量的调节了,因为滤波已经把柔性带噪声的信号变换成类刚性物体的近似线性调节特性了,这时对刚性物体的调节再加入纯微分环节就不太适宜了会影响刚体的及时响应性,君不见很多刚体运动控制场合不要说微分环节有时连积分环节都要很小,纯P放大调节都差不多了,因为系统已经相对线性了。还有现有成熟的调节计算方法基本是由时域的大于等于2阶的时域连续微分方程经过S域及Z域变换,再根据数字控制系统系统时钟采样处理能力的大小反Z变换到离散的时域,离散时域的差分方程才能用来编程,因此纯微分作用的微分方程已经近似离散成带斜坡的更符合工程现场工况的不完全微分方程了,再也不是理想的纯微分方程了,这也更符合工程应用的需求。 |
|
贤贤易色 奇侠 经验值:8086 发帖数:1308 精华帖:6 |
47楼
主题:回复:《为啥PID闭环控制,通常不使用微分环节》昨晚刚刚试了一下啊加热过程中的控制:只用PI的情况下出现差2-3度的差,,,,,.输出平缓....在加入D的情况下输出波动,,忽高忽低..............温度差±1度.............. 速度控制来说假如D来说可能有问题,忽上忽下..
养活一团春意思,撑起两根穷骨头
|
|
老兵 至圣 经验值:55091 发帖数:9597 精华帖:488 |
51楼
主题:回复:《为啥PID闭环控制,通常不使用微分环节》D的使用不广,不只是在后半程抑制了动态恢复时间,还有无法处理实际值“毛刺”的弱点。 加入了D,有时反而成了另一种放大的噪音。
天生不宜做胜利者,自来没有胜利的欲望,只是不甘失败,十分十分不甘心失败。木心
|
|
yming 版主 经验值:126844 发帖数:21987 精华帖:824 |
64楼
主题:回复:《为啥PID闭环控制,通常不使用微分环节》要动手,才能深入理解。不停留在表面的理解。 举个例子: 生产线有十台调速驱动,容量大小不一;工艺要求 “各台之间保持恒定速比”的关系。在变速(升降速过程中,也必须保持速比。否则,产品就损坏了。) 不同的产品,速比不同。 常规的认识,就是PLC控制器 按工艺要求的速比,循环 计算、输出各台的给定值,发送给每台调速驱动器。“保证”变速过程中速比恒定。 但实际上,如果使用低成本 USS 通讯,还是有问题。因为,实际上是轮询,是一台 - 一台地发送,启/停、给定值,还是有时间差,调速器越多,轮询一周的时间越长! 如果,真的理解了功能图的含义。就可以发送相同的控制字、设定值,使用 广播报文!所有挂在总线上的 驱动器 同时接受报文,同时启/停、升/降变速! 为什么可以? 因为,你可预先发送、存储 每台设定值的 系数!设定值的系数不就是比例么?相对各台之间,不就是速比么? 这样一来,就免去了PLC的周期计算!程序就变的很简单了。 对吧? (我也是从 ZANE 大侠那里学的
学而时习之,不亦说乎?温故而知新,不亦乐乎?
|
|
李岩 至圣 经验值:13616 发帖数:2834 精华帖:32 |
78楼
主题:回复:《为啥PID闭环控制,通常不使用微分环节》任老师威武!我原来对PID的认识模模糊糊,看完了全部楼层,好像有些理性认识了。反馈滞后大的才加入微分。这个就是其中一个收获。 我原来对于微分的理解是跟斜率有关,如果PV在接近SP的过程中斜率大,微分会提前调节输出,使斜率减小。好像也没错,但对于滞后却是没有想到的。
国人当自强 共同努力 抵制日货
|










 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城














 短信登录
短信登录
