| 作者 | 主题 |
|---|---|
|
liul_sharp 奇侠 
经验值:7030 发帖数:393 精华帖:54 |
楼主
主题:转速调节器和加速预控 
先搬个砖:
这是抄来的原句。上面总结了转速调节器的调试方向,以及配合的加速补偿的调节方法。可用于手动调节转速调节器的指导。对于高性能的应用,在手动优化的时候,特别有用! 对于负载惯量远远大于电机惯量的应用(惯量匹配),连接轴的刚性问题始终难以绕开。那么在高动态调节的时候就存在转速跟不上,扭振,低速区波动等问题。这类问题可以用加速预控来减小减轻一些。 具体来说,给电机的力矩由2部分构成,一部分是转速调节器的输出值 r1480,一部分是加速预控力矩输出 r1518。通过调节 p1496 或者 p342 逐步增加预控的力矩输出,慢慢使得转速调节器的负担(workload)减小,出力减小。也就是说加速过程起主导作用的是预控,而转速调节器的作用仅仅是消除转速偏差的次要作用。当然,原文的第二条是希望在前20%的额定转速下将净差消除,也最好!理想情况是第一条说的,让转速调节器仅仅补偿系统自身的干扰,其实是指负载突变的情况。转速给定值变化是由预控来快速解决掉。回到刚性问题,预控不能过猛,过猛会导致轴的径向形变加剧,激发扭振。造成启动的瞬间,转矩,转速波动,打齿。因此预控要加滤波(PT1),用 p1517 来控制预控力矩的上升平滑过程。也可以使用 p1416 来平滑,但是这样会造成整个系统转速响应的延迟(波形几乎整体延迟输出,跟随性变差)。这样加速初期出力是平缓的,这样不容易造成大的初期扭振,从而转速调节器输出也会减轻波动,因此,也就可以进一步提升转速调节器增益,往高性能方向上努力了。 另外,加速预控的增加可以减小转速超调量。 |
|
yming 版主 经验值:126848 发帖数:21989 精华帖:824 |
2楼
主题:回复:转速调节器和加速预控这要分情况。 如果速度闭环是在IO控制器上(设备编码器接在PLC上,由PLC的PID调节)时,给定值就会不断地调整。预控将一直在起作用。 若速度给定使用模拟量时,模拟量信号也会不断地波动(即使旋钮没人动。)。预控也会工作。 注意,越大的转动惯量,越不易受到负载变化的干扰。 所以,何种情况下启用预控,要仔细考虑。 通常,速度预控都是在速度闭环做在驱动中时,才启用。 至于预控的作用程度,不管动态优化结果如何,都可以用1496比例系数来调整。
学而时习之,不亦说乎?温故而知新,不亦乐乎?
|
|
liul_sharp 奇侠 经验值:7030 发帖数:393 精华帖:54 |
5楼
主题:回复:转速调节器和加速预控如果转速给定一次性给定到目标转速,就会产生一个固定的加速预控力矩,r1518 就是平直的。启动加速的过程中,如果出现振荡的话,肯定是速度调节器输出振荡导致的。如果系统还要求高动态,高性能的话,可能就会去压榨电机过载能力,如果输出力矩限幅到了,转速环的积分环节就会被冻结,积分分量的出力就不变了。这是所谓的“积分分离调节器”。就得想办法让速度调节器输出稳定,又不减少动态性,碰上惯量失配(Inertia Mismatch)的,刚性又很差的,就得加大那个平直的加速预控力矩的滤波,让它平缓的去扭麻花儿,别让它来回弹起来,然后尽量把转速环往更高动态性去调节。如果加了滤波效果还是欠缺,再加点初始圆弧效果也会好很多。慢慢地压榨这个系统的动态极限。注意安全,大惯量比的容易断轴。 |
|
老兵 至圣 经验值:55113 发帖数:9603 精华帖:488 |
11楼
主题:回复:转速调节器和加速预控其实没那么复杂的。 抛开电流环的预控制不谈,只谈速度环的预控制。 速度环的预控制时间常数其实就是(负载+电机)本身机械惯性常数Tm*dn/dt。其物理意义就是让电气的输出跟机械的惯量恰好的匹配,谁也不超前谁,谁也不滞后谁。 因而,不考虑机械惯量及速度的微分去谈速度环的预控制本身就是耍流氓。 如果这个预控制时间常数设的大了,充其量也就是调节慢一点。 但如果设的小了,系统马上就会超调,就是一另一种干扰了,会让系统激剧振荡。在这种情况下,如果再不限制转矩的输出,出现断轴或者齿轮损坏,也就不是意外了。 所以,这个预控制最好的应用场合是加速斜坡恒定的地方。因为dn/dt恒定。 如果加速曲线本身是S曲线,那预控制的效果是惨不忍睹的。
天生不宜做胜利者,自来没有胜利的欲望,只是不甘失败,十分十分不甘心失败。木心
|
|
老兵 至圣 经验值:55113 发帖数:9603 精华帖:488 |
12楼
主题:回复:转速调节器和加速预控还有,K版提出一个在直流装置中喜欢用预控制,在交流系统中不用预控制的观点,其实,也不意外。 这要从预控制概念的生产说起。 在模拟控制时代,是没有预控制概念的。数字控制时代,才出现了预控制的概念。这也反应了二者之间的两个重要不同点: 1、在模拟控制系统中,给定值与实际值是同步处理的。没有先后,速调的实际值就是当前系统的实际值,没有时延。 2、在模拟控制系统中,从速调的输入到脉冲作用到电枢,是不分先后的,也近似没有时延。 而在数字控制系统中, 1、速度实际值 是受采样周期控制的,速调的实际值,最快最快也得是上个采样周期的数值,不可能是当前的实际值。 2、从速调到触发脉冲作用到电枢回路,是一级一级串联计算的,受系统计算速度的影响。 所以,从本质上讲,数字控制系统就没有模拟控制系统“快”。在这种情况下,才提出了“预控制”的概念。而且,还是一大突破性的概念,让数字控制系统一下子变的“又快又好”。 而在控制系统的发展中,直流调速是早于交流调速的(理论及实践都是),早期的数字系统运算能力有限,再加上直流调速本身的固有缺陷(电流环再快也不会比可控硅的换相周期3.3ms快),所以,为了获得好的动态特性,预控制就应用的比较多。当然,也有的系统是半数字+半模拟,就没有预控制的功能。 而在交流调速系统中,早期都是V/F控制,预控制没有存在的必要。后期失量控制及DTC控制理论慢慢成熟时,数字控制系统的运算能力已经今非昔比了,再加上交流系统本身是PWM调制(包含以此为基础的延伸),转矩环的响应时间远小于直流系统 ,在大多数的控制系统中,预控制就显的可用可无。 但是,在伺服控制中,其实,预控制必不可少,所以,伺服的控制系统的优异特性不只是因为电机好,控制算法的作用也非常关键。
天生不宜做胜利者,自来没有胜利的欲望,只是不甘失败,十分十分不甘心失败。木心
|
|
liul_sharp 奇侠 经验值:7030 发帖数:393 精华帖:54 |
16楼
主题:回复:转速调节器和加速预控我说的前提是:系统要求高性能! 如果没有高性能要求,预控也可以没有啊,就靠PI也能慢慢拉起来转啊~ |
|
老兵 至圣 经验值:55113 发帖数:9603 精华帖:488 |
18楼
主题:回复:转速调节器和加速预控哦,我看了一下,你这个不是S曲线。 你这个是在启始及终端加圆弧。 S曲线,本质上,全域的加加速度都是平缓过度的。 其数学函数是
由这个公式可以看出,整个过程没有一个恒定的Dn/dt,所以,预控制的时间常数就不恒定,你如果此时用预控制,要么预控制作用很弱(时间常数设的大一点),要么就变成了干扰。 尤其是在加速时间还要不断调整的系统中,S曲线与预控制,通常只能二选一了。 特例:伺服控制系统除外。
天生不宜做胜利者,自来没有胜利的欲望,只是不甘失败,十分十分不甘心失败。木心
|
|
Zane 至圣 经验值:76200 发帖数:19331 精华帖:377 |
38楼
主题:回复:转速调节器和加速预控我讲一下我的观点: 1)经典控制理论课程只有反馈和前馈这两个概念,预控是其他学科比如计算机控制等提出的概念。反馈控制和前馈控制现在也被用来区别闭环控制的方式,严格意义前馈是开环的,前馈闭环系统,是指前馈+闭环控制。 2)西门子的手册的确大量使用precontrol这个词,但根据我看使用的技术前提,都是十分经典的前馈闭环应用,所以我认为西门子使用这个词更侧重于闭环控制方式,现在的中文版翻译也是普遍使用“前馈”一词,应该是在中文上更贴近技术本意。 3)但我认为,前馈与预控亦不能相提并论,前者是理论算法方式,后者是策略,后者的含义更加的宽泛一些可以包含前馈但不仅仅是前馈。 我们经常提到的模型控制,是不是就是一种可以包含前馈的预控制呢? 事实上英语中,feed forward control 与 precontrol 如果泛指的话也是后者更合适,而且更简短明了
Zane
注册自动化系统工程师
Always save before download
|
|
老兵 至圣 经验值:55113 发帖数:9603 精华帖:488 |
56楼
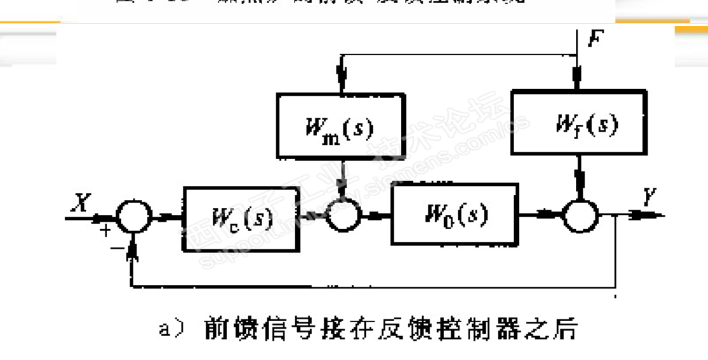
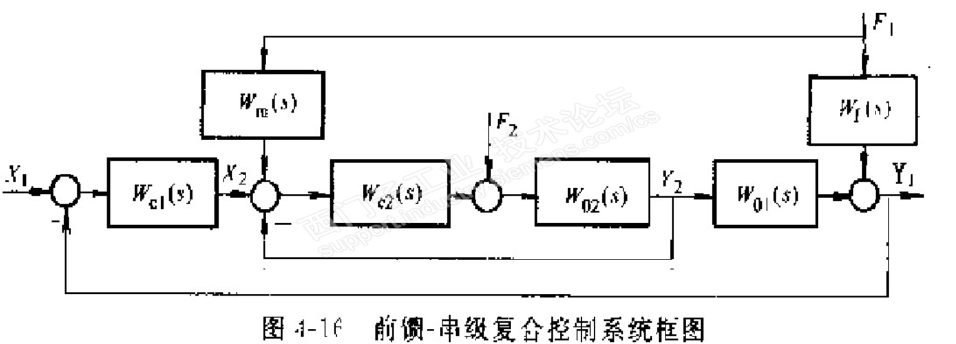
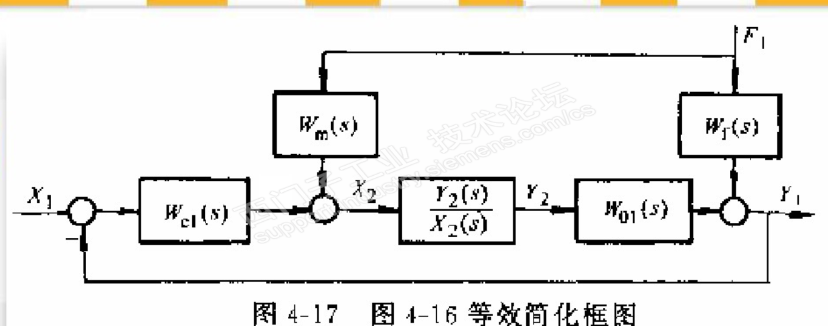
主题:回复:转速调节器和加速预控
用传递函数说明,啥叫precontrol,啥叫feed forward control.
天生不宜做胜利者,自来没有胜利的欲望,只是不甘失败,十分十分不甘心失败。木心
|
|
老兵 至圣 经验值:55113 发帖数:9603 精华帖:488 |
57楼
主题:回复:转速调节器和加速预控叫啥,得看作用在哪个通道。 绝对不能乱点鸳鸯谱,更不能混为一谈。
天生不宜做胜利者,自来没有胜利的欲望,只是不甘失败,十分十分不甘心失败。木心
|
|
yming 版主 经验值:126848 发帖数:21989 精华帖:824 |
73楼
主题:回复:转速调节器和加速预控我做的,大板结构。100kW;在月工资百多元的年代,卖2.2万;用这个装置,养活了部分下岗职工。深刻体会:“知识改变命运”。
学而时习之,不亦说乎?温故而知新,不亦乐乎?
|










 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城















 短信登录
短信登录
