| 作者 | 主题 |
|---|---|
|
Haohaobb 至圣 
经验值: 15845 发帖数: 1645 精华帖: 39 |
楼主
主题:关于G120 P96参数的选择使用 
接触G120变频器大概有五六年了,虽算不上专家也算是有一些调试经验; 最近调试的一台设备,遇到了个问题,使出浑身解数,未能解决问题: 电机拖动一个固定重量的设备在轨道上往复运行,带增量编码器。 起初负责调试的同事反馈,在某个固定速度下匀速运行时会有间隔一段运行距离就出现速度波动的情况,转速设定的一点时,从曲线上看,速度有明显的波动,伴随着电流的波动(比如五六百转,电机额定转速为3000转的),再提高转速1000左右的时候,经过是直接报过电流,有时候是电机过电流,有时候报驱动器过电流。 尝试发现P1300=21/20都有类似现象,P1300=0,转速反而是稳定的,电流也稳定,基本无过流报警。 尝试安装过往经验恢复出厂设置,重新初始化,做静态识别,甚至动态识别都不行。一度怀疑机械有问题,但是vf模式下比较稳定,也怀疑编码器问题,但是slvc也报警。 后来请了一个技术人员给协助调试,其在重新初始化过程中,第一步p96选择了2(Dynamic Drive Control (DDC)),而我习惯一直选0expert的。先使用slvc做了初始化及静态识别,然后运行效果不错,加上编码器,改成vc,调整了些增益,速度的不稳定及过流报警消失了。发现p96选择2后,对比选0会隐藏一些参数不需要设置了。 另外就是发现p502,我之前选的是0,调整后选的是1,感觉这个好像也有比较明显的影响。 该问题折腾了比较长的时间,中间做了诸多测试,以及各种采集曲线什么的。今天有明显进展,想先把情况描述一下,请各位技术专家给指点一下迷津。
天道酬勤
|
|
老兵 至圣 经验值: 55162 发帖数: 9607 精华帖: 489 |
1楼
主题:回复:关于G120 P96参数的选择使用你的负载是往复运动的,不是泵之流的,所以,用DDC更适合啊。 其实,我觉得P96不关键,关键是P502=1
天生不宜做胜利者,自来没有胜利的欲望,只是不甘失败,十分十分不甘心失败。木心
|
|
Haohaobb 至圣 经验值: 15845 发帖数: 1645 精华帖: 39 |
2楼
主题:回复:关于G120 P96参数的选择使用 谢谢版主回复。 我们关于g120的调试,之前一直p96选0,p502是默认的0,类似设备之前没有遇到如此明显和规律性的问题现象,不知道什么原因。 那关于这2个参数的选择,有什么规律或者资料说明吗?96选了1之后,很多参数诸如P501等都隐藏了,是无需调试了的意思?或者说是用不到了。p502的选择012(标准设备、动态启动或换向、重载启动), 从字面理解,泵、风机什么的选0?诸如在轨道运行的车体、输送机皮带机甚至提升机啥的,选1吗?启动惯性比较大的挤出机压缩机选2? 那如此看,我们之前真没有注重这个参数的选择。 这个参数会影响到哪些参数的调整呢?或者是否可以说p502选的合适能够简化调试,否则可能需要手动做很多细致的其他参数的调整?还是说p502选的不合适设备肯定就无法达到更优的效果?
天道酬勤
|
|
kdrjl 至圣 经验值: 136397 发帖数: 34927 精华帖: 435 |
3楼
主题:回复:关于G120 P96参数的选择使用 P0096在G120里有三个设置。等于0,1,2。等于0 是什么概念?是专家模式。专家模式呀,这是万能的设置。怎么可能会影响你的系统出问题呢?等于2是动态控制模式,它不过是把动态控制作为一种模板提供使用者罢了。你的那个P0096 = 0同样是可以设置等于2时的参数呢。所以P0096的设置不是问题导因。 那么P0502 = 1是针对PM240-2的动态特性设置,非常符合你的应用,就是小车往复运行。它既是惯性负载,也是往复启动运行的工艺需求。 在G120参数手册里,功能图一章,针对P96 = 0和P96 = 2都有成组的功能图,调出来自己对照一下就知道了。 不错呦,此问题是传动专业带着问题学习一个很好的例子。
我是你的朋友
|
|
Haohaobb 至圣 经验值: 15845 发帖数: 1645 精华帖: 39 |
4楼
主题:回复:关于G120 P96参数的选择使用 嗯,现在也大概理解了 96参数及工艺模式应该算是类似一个宏功能一样。今天尝试用专家模式,也调出来了一套适用的参数,不再出现速度波动及过电流报警,P501 502 都是0,然后导出为csv格式用beyond compare去比较2个参数的差别,除了一些只读r的参数不同,比较发现参数p205之前是选的1轻过载,新调的参数是选的0重过载,然后就怀疑是该参数为关键原因。于是重新进行快速调试,选轻过载,快速调试过程时一段更改p205电机参数就得重新输入了。于是又输入了一遍。然后做了静态识别,一运行果然出现了之前的速度波动和过电流报警现象,以为找到原因了,于是又走快速调试切换为重过载,重新输入参数,静态识别,结果这次又不行了,有点郁闷,还是有速度波动和过流报警发生,折腾到很晚,没有搞好,下载了备份的参数,就又恢复了正常。明天再努力一下。 p96选择的不同开放的参数也不一样,选0专家应该是最全的,选2时,电机初始化向导里面甚至不需要输入功率因数,初始化结束,还得再单独选择电机调试添加功率因数。 另外,又想起来,版主说p96选啥不要紧,关键是p502,但是96选0时,初始化向导里面没有关于p502的设置选择,只有p205和p500,结束快速调试区更改p502 还不让改,不是因为带锁,修改了p10,再修改p502也就报错,只能在快速调试选择96=2时,向导里面有选择p502的时候,可以进行选择0 1 5,而且 96=2模式下,回头看参数列表,p205,p500,p501都变成不可见的,即使选择了扩展参数。 这样导致了一些比较工作不太方便。
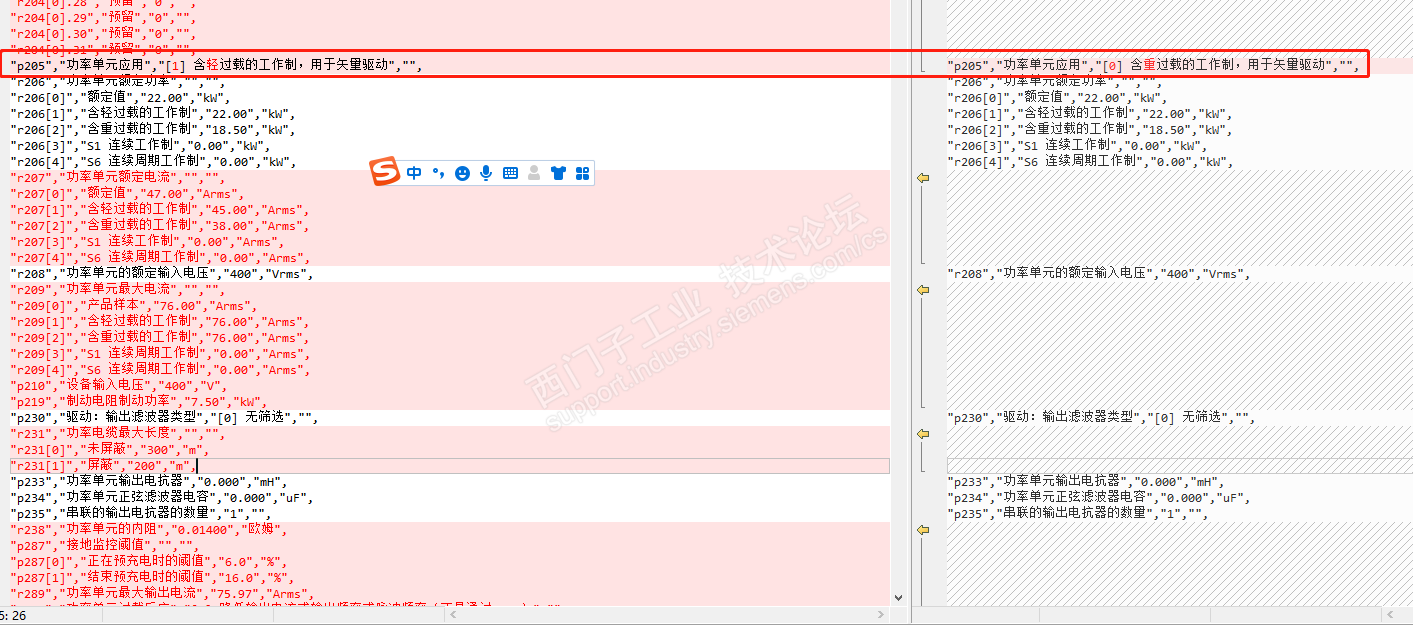
贴一下3组参数吧。 7.18那个是选的p96=2,p502=1的,效果不错, 7.19是今天在专家模式下调的,500--502都是0,目前看效果也不错; 7.18之前的有问题。看和7.19的貌似就发现了p205不同。 明天再试试,看看能否再精确定位一下问题点。
天道酬勤
|
|
kdrjl 至圣 经验值: 136397 发帖数: 34927 精华帖: 435 |
5楼
主题:回复:关于G120 P96参数的选择使用 不错,是动了脑子了。我推荐楼主,看一下参数手册里,P96 = 2的矢量控制功能图。如果能看懂了,或许对你自己的问题有帮助。对照一下P96 = 0的矢量控制功能图,或许会从它们的原理上找到解决问题的灵感。 当然功能图如果不会看,或看不懂,另当别论了。但一定要学会看。这是你深入学习和掌握传动控制系统的基础。功能图是传动控制系统的设计者和使用者之间进行交流的专业语言。要努力掌握它。对你使用西家传动产品帮助极大。
我是你的朋友
|
|
kdrjl 至圣 经验值: 136397 发帖数: 34927 精华帖: 435 |
9楼
主题:回复:关于G120 P96参数的选择使用 假如你掌握了STARTER里的trace功能的使用方法。监控和诊断问题,那可是再方便不过的了。什么问题都能看得见,摸得着。处理问题的故障点,清晰可见。 我们在过去学习《电路分析》课程时,讲一个四端网络,不管内部有多复杂,无外乎就是输入和输出。只要知道了输入是什么,输出是什么,就可以对其进行分析了。trace(波形录入),就是对一个功能块的输入和输出进行实录状态,来分析它的规律性。好使极了。
我是你的朋友
|
|
Haohaobb 至圣 经验值: 15845 发帖数: 1645 精华帖: 39 |
10楼
主题:回复:关于G120 P96参数的选择使用 我们更新一下这个设备的最新状态,在另外一个项目上,相同的驱动器,相同的电机,同事按照往常办法,做初始化,做电机静态识别,也出现了相同的问题,然后经过几番努力,得到了一个能够稳定运行没有速度波动的参数之后,经过这个同事的努力,通过逐一对比2套参数的区别,最终找到了印象速度波动的关键参数。
不同的工艺模式,有时候导致静态识别得到的参数数值不一样,也导致了运行效果的不一样。 数值偏高时,低速运行,速度有规律性跳变,导致电流随之波动,提高转速,速度的波动可能会导致产生电机过电流报警或者驱动过电流报警。 经过对比2套参数,最终发现P360的数值大小直接影响了这个的运行情况,比如在17之上必然出现,原来运行不正常的参数,修改减小这个参数,则异常随之小时。通过找到电机厂家索取得到的该参数,反而发现是20多,输入进去也是不行。
天道酬勤
|










 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城
















 短信登录
短信登录
