在使用PID控制器前需要对其进行组态设置,共分为基本参数组态与高级参数组态两部分。
在进行基本参数组态前,需要先添加循环中断,并在循环中断中添加PID_Compact指令块。
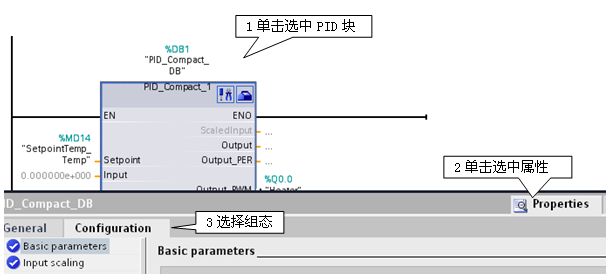
在循环中断块中,点击PID指令块,选择属性,选择组态,可进入基本参数组态,定义控制器的输入输出,给定值等参数,如图1所示。
图1 进入参数组态
PID基本参数组态如图2所示。

图2 PID基本参数组态
1 Controller Type(控制器类型):这里可选择控制对象的类型,如温度控制器,压力控制器,默认为以百分比为单位的通用控制器,这里的选择会影响后面参数的单位,但不会影响控制器的P,I,D数值。
2 激活此选项会使控制器变为反作用PID,如应用在降温系统中。
3 Setpoint(给定值):自动模式下的给定值。
点击下拉列表,可定义控制器给定值源
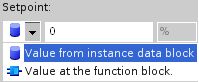
图3 给定值源选择
Value from instance data block:给定值来自背景数据块。
Value at the function block:给定值来自功能块。
4 Input Value(反馈值) :
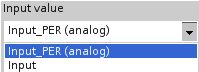
图4 反馈值类型选择
Input_PER(analog):使用外设模拟量输入。
Input:使用从用户程序而来的反馈值。
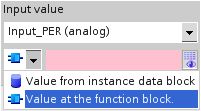
图5 反馈值源选择
Value from instance data block:反馈值来自从背景数据块。
Value at the function block:反馈值来自功能块。
5 Output Value(输出值):
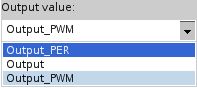
图6 输出值类型选择
Output_PER:模拟量输出形式。
Output:输出至用户程序。
Output_PWM:使用PWM输出。
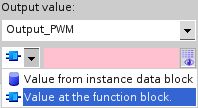
图7 输出值源选择
Value from instance data block:输出值来自从背景数据块。
Value at the function block:输出值来自功能块。
进入Project tree(项目树)→Technological Objects(工艺对象) →PID_Compact_1[DB1] →Configuration,如图8
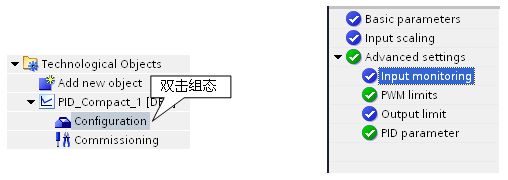
图8 进入基本参数组态
反馈值量程化组态如图9

图9 反馈值量程化组态
此界面用于量程化输入值
1与6为一组,用于配置输入量程上限,1为物理量的实际最大值,6为模拟量输入的最大值
4与5为一组,用于配置输入量程下限,4为物理量的实际最小值,5为模拟量输入的最小值
2与3分别为用户设置的高低限制,当反馈值达到高限或低限时,系统将停止PID的输出。
Input monitoring输入监控组态如图10。
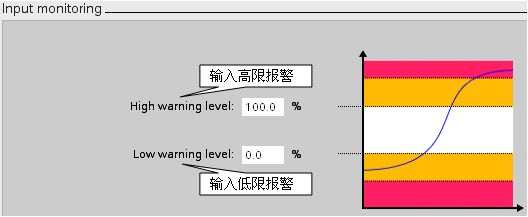
图10 输入监控
当反馈值达到高限或低限时,PID指令块会给出相应的报警位。
PWM limits组态如图11。
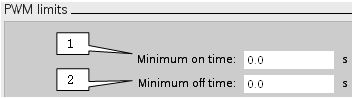
图11 PWM Limits
1为PWM输出时,一个脉冲周期内最小接通时间。
2为PWM输出时,一个脉冲周期内最小关断时间。
PID parameter(PID参数)组态如图12。
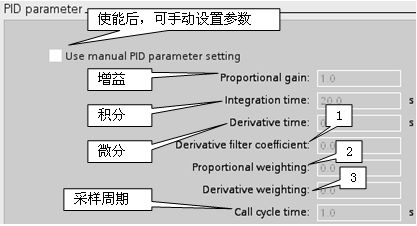
图12 PID参数
1:微分滤波系数:即微分环节的延迟时间,可在D值不变的情况下,用于降低控制器对高频干扰的敏感度
2:比例权重:即设定值进入比例环节的比重,可在P值不变的情况下,用于减少系统设定值阶跃引起的超调
3:微分权重:即设定值进入微分环节的比重, 可在D值不变的情况下,用于抑制系统在设定值阶跃时引起的输出突变