
“原点”也可以叫做“参考点”,“回原点”或是“寻找参考点”的作用是:把轴实际的机械位置和S7-1200程序中轴的位置坐标统一,以进行绝对位置定位。
一般情况下,西门子PLC的运动控制在使能绝对位置定位之前必须执行“回原点”或是“寻找参考点”。
“扩展参数-回原点”分成“主动”和“被动”两部分参数。
在这里的“扩展参数-回原点-主动”中“主动”就是传统意义上的回原点或是寻找参考点。当轴触发了主动回参考点操作,则轴就会按照组态的速度去寻找原点开关信号,并完成回原点命令。
①输入原点开关:设置原点开关的DI输入点。
②选择电平:选择原点开关的有效电平,也就是当轴碰到原点开关时,该原点开关对应的DI点是高电平还是低电平。
③允许硬件限位开关处自动反转:如果轴在回原点的一个方向上没有碰到原点,则需要使能该选项,这样轴可以自动调头,向反方向寻找原点。
④逼近/回原点方向:寻找原点的起始方向。也就是说触发了寻找原点功能后,轴是向“正方向”或是“负方向”开始寻找原点。
如果知道轴和参考点的相对位置,可以合理设置“逼近/回原点方向”来缩短回原点的路径。例如,以上图中的负方向为例,触发回原点命令后,轴需要先运行到左边的限位开关,掉头后继续向正方向寻找原点开关。
“上侧”指的是:轴完成回原点指令后,以轴的左边沿停在参考点开关右侧边沿。
“下侧”指的是:轴完成回原点指令后,以轴的右边沿停在参考点开关左侧边沿。
无论用户设置寻找原点的起始方向为正方向还是负方向,轴最终停止的位置取决于 “上侧”或“下侧”。
⑥逼近速度:寻找原点开关的起始速度,当程序中触发了MC_Home指令后,轴立即以“逼近速度”运行来寻找原点开关。
⑦参考速度:最终接近原点开关的速度,当轴第一次碰到原点开关有效边沿儿后运行的速度,也就是触发了MC_Home指令后,轴立即以“逼近速度”运行来寻找原点开关,当轴碰到原点开关的有效边沿后轴从“逼近速度”切换到“参考速度”来最终完成原点定位。“参考速度”要小于“逼近速度”,“参考速度”和“逼近速度”都不宜设置的过快。在可接受的范围内,设置较慢的速度值。
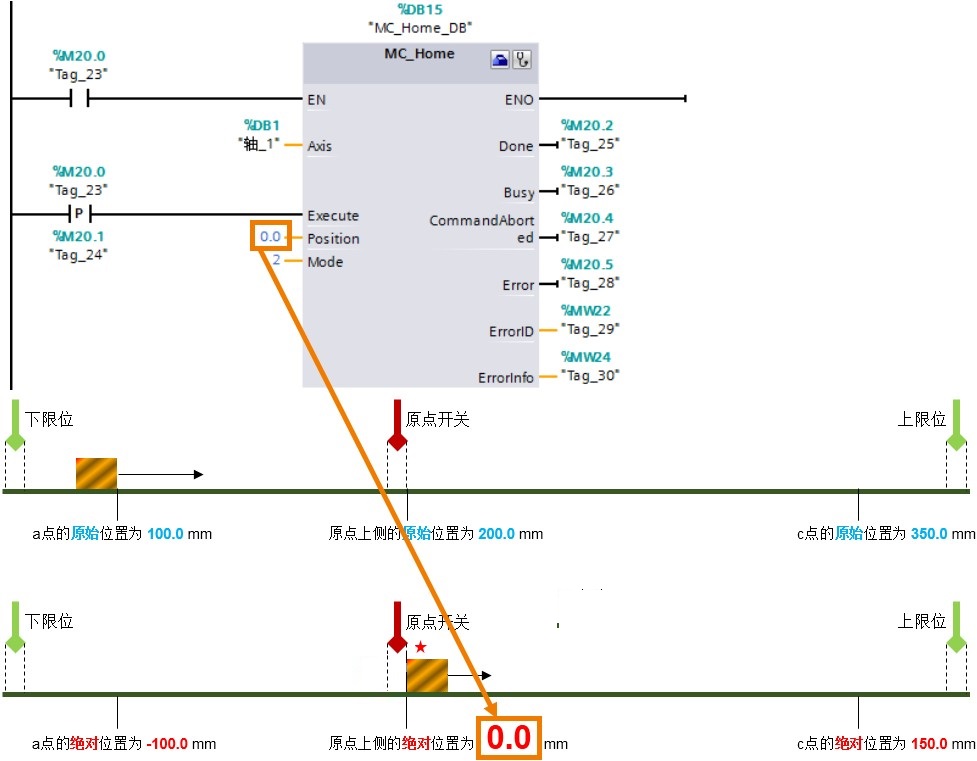
⑧起始位置偏移量:该值不为零时,轴会在距离原点开关一段距离(该距离值就是偏移量)停下来,把该位置标记为原点位置值。该值为零时,轴会停在原点开关边沿儿处。
⑨参考点位置:该值就是⑧中的原点位置值。
---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
如下图所示,用例子来说明轴主动回原点的执行过程。根据轴与原点开关的相对位置,分成4种情况:轴在原点开关负方向侧,轴在原点开关的正方向侧,轴刚执行过回原点指令,轴在原点开关的正下方。
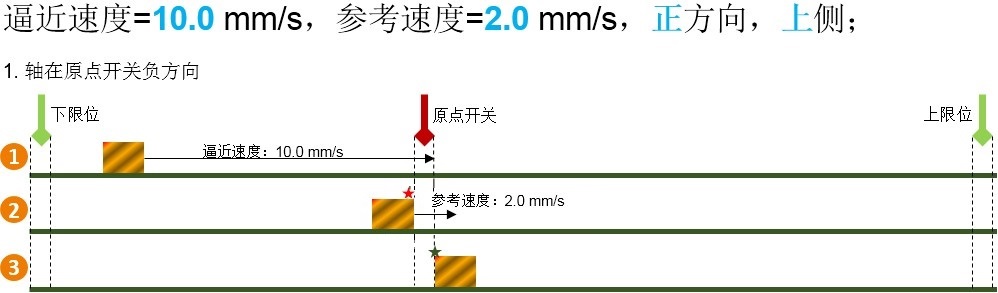
①当程序以Mode=3触发MC_Home指令时,轴立即以“逼近速度 10.0mm/s”向右(正方向)运行寻找原点开关;
②当轴碰到参考点的有效边沿,切换运行速度为“参考速度2.0mm/s”继续运行;
③当轴的左边沿与原点开关有效边沿重合时,轴完成回原点动作。
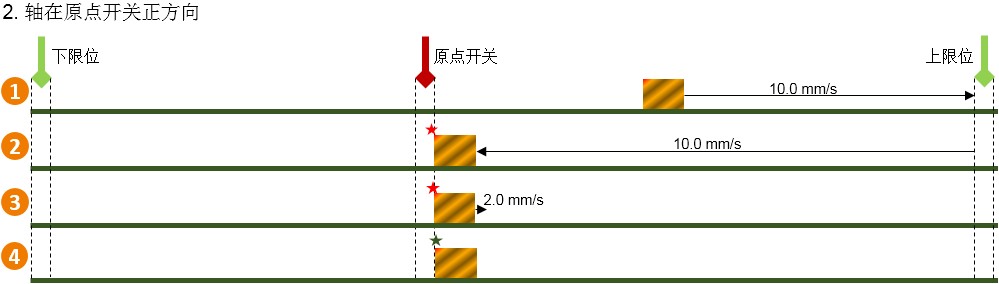
①当轴在原点开关的正方向(右侧)时,触发主动回原点指令,轴会以“逼近速度”运行直到碰到右限位开关,如果在这种情况下,用户没有使能“允许硬件限位开关处自动反转”选项,则轴因错误取消回原点动作并按急停速度使轴制动;如果用户使能了该选项,则轴将以组态的减速度减速(不是以紧急减速度)运行,然后反向运行,反向继续寻找原点开关;
②当轴掉头后继续以“逼近速度”向负方向寻找原点开关的有效边沿;
③原点开关的有效边沿是右侧边沿,当轴碰到原点开关的有效边沿后,将速度切换成“参考速度”最终完成定位。
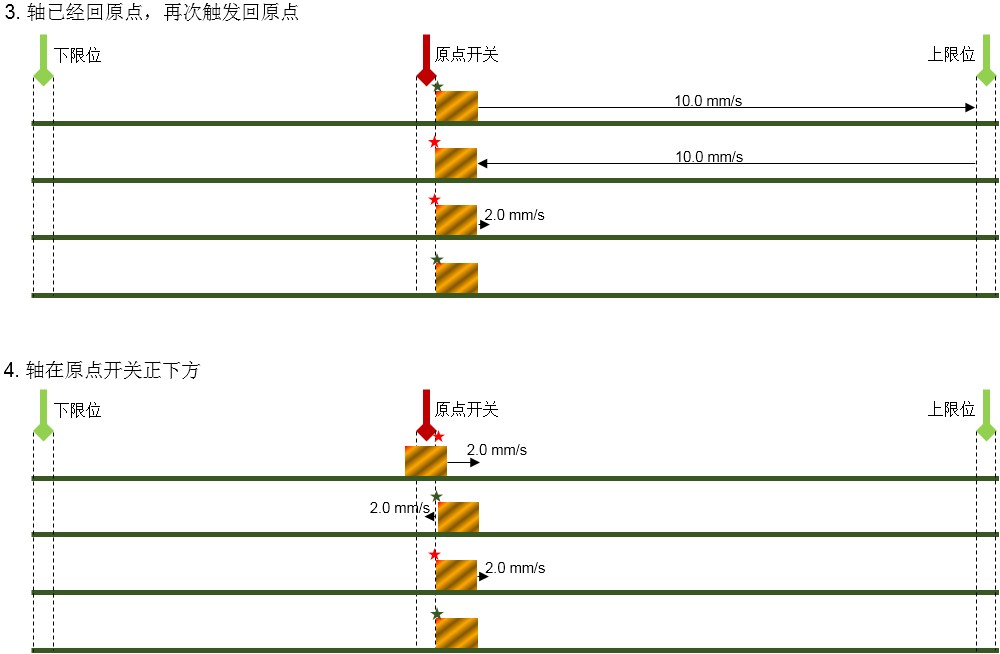
上图中的3和4说明了两种特殊情况下轴的回原点的过程。
下图以4种情况来说明轴以“负方向”和“下侧”的方式主动回原点的过程。


被动回原点指的是:轴在运行过程中碰到原点开关,轴的当前位置将设置为回原点位置值。

①输入原点开关:参考主动会原点中该项的说明。
②选择电平:参考主动回原点中该项的说明。
③参考点开关一侧:参考主动回原点中第5项的说明。
④参考点位置: 该值是MC_Home指令中“Position”管脚的数值。
用例子说明如何实现一个被动回原点的功能:
步骤一:在上图中选则“参考点开关一侧”为“上侧”;
步骤二:先让轴执行一个相对运动指令,该指令设定的路径能让轴经过原点开关;
步骤三:在该指令指令的过程中,触发MC_Home指令,设置模式为Mode=2.
步骤四:这时再触发MC_MoveRelative指令,要保证触发该指令的方向能够经过原点开关。『结果』当轴以MC_MoveRelative指令指定的速度运行的过程中碰到原点开关的有效边沿时,轴立即更新坐标位置为MC_Home指令上的“Position”值,如下图所示。在这个过程中轴并不停止运行,也不会更改运行速度。直到达到MC_MoveRelative指令的距离值,轴停止运行。
『结论』
1. 被动回原点功能的实现需要MC_Home指令与MC_MoveRelative指令,或MC_MoveAbsolute指令,或是MC_MoveVelocity指令,或是MC_MoveJog指令联合使用。
2. 被动回原点需要原点开关。
3. 被动回原点不需要轴不执行其他指令而专门执行主动回原点功能,而是轴在执行其他运动的过程中完成回原点的功能。

