找答案的高端用户(找答案钻石及双钻级别的用户)将尽可能从此问题下的所有回
答中,为您推荐最佳答案。届时您可以根据推荐数采纳答案。
如果自提问时间起7天内您仍无法选出最佳答案,您可以选择“无满意答案”关闭此问题。
 问题
问题
 取消精华
取消精华
 首页精华问答
取消推荐
首页精华问答
取消推荐
 高端用户推荐
高端用户推荐
 申请置评
已申请置评
申请置评
已申请置评
 修改
修改
 修改标签
添加标签
修改标签
添加标签
 官方认证
取消官方认证
修改标签
添加标签
官方认证
取消官方认证
修改标签
添加标签
 删除
删除
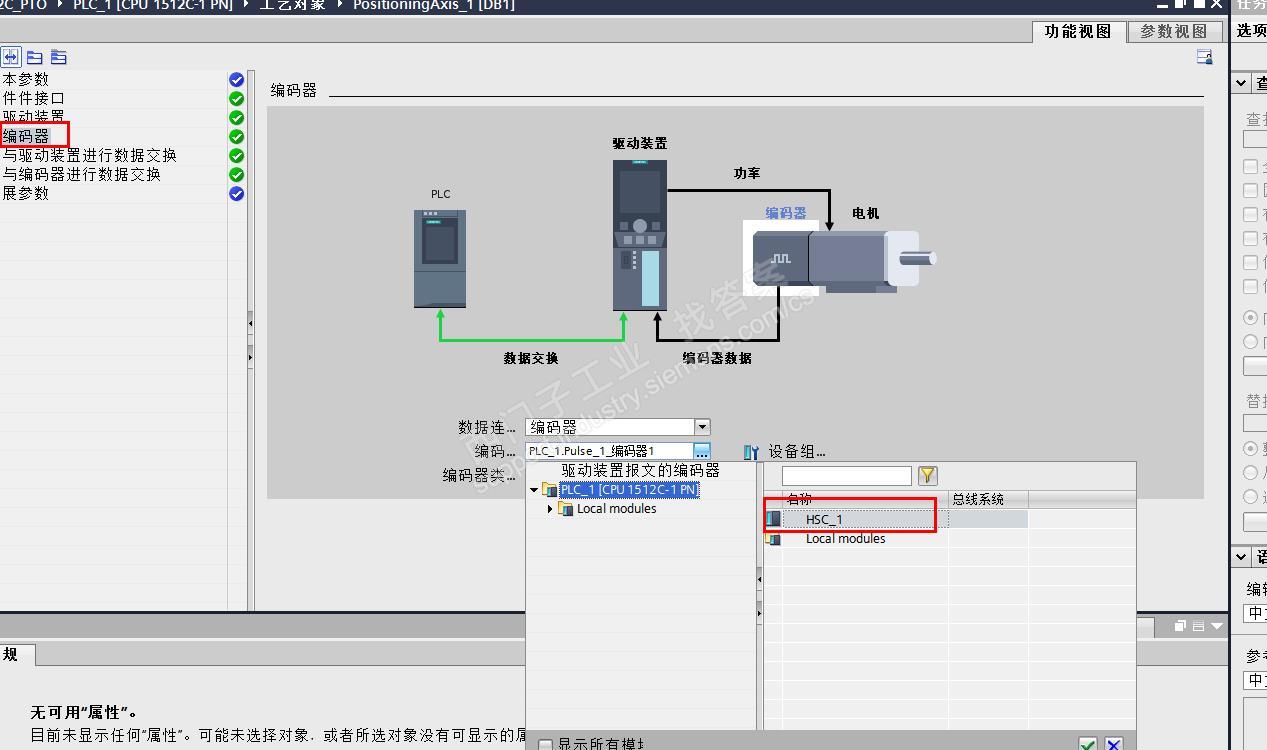
目的:不回零点(或者短期内不用回零点),多次运动后,定位的位置依然很准确。
现在使用1500plc通过全闭环的方式来控制伺服,但是我不知道具体应该怎么实现。
设备构成:一个plc型号是1512C-1,一套伺服(单轴驱动器型号是台达A2系列的、伺服电机),一个外部增量编码器;
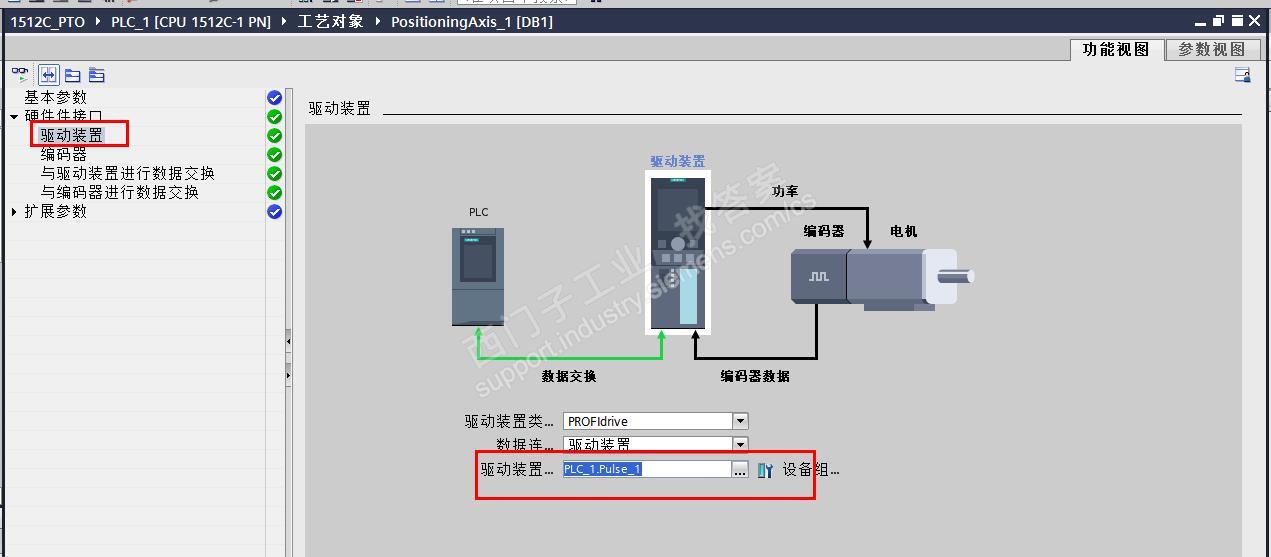
我目前的做法是:plc发脉冲给伺服驱动器,通过外部编码器接到高速脉冲输入端口,把实际负载的位置返回给plc,构成全闭环控制;
问题:
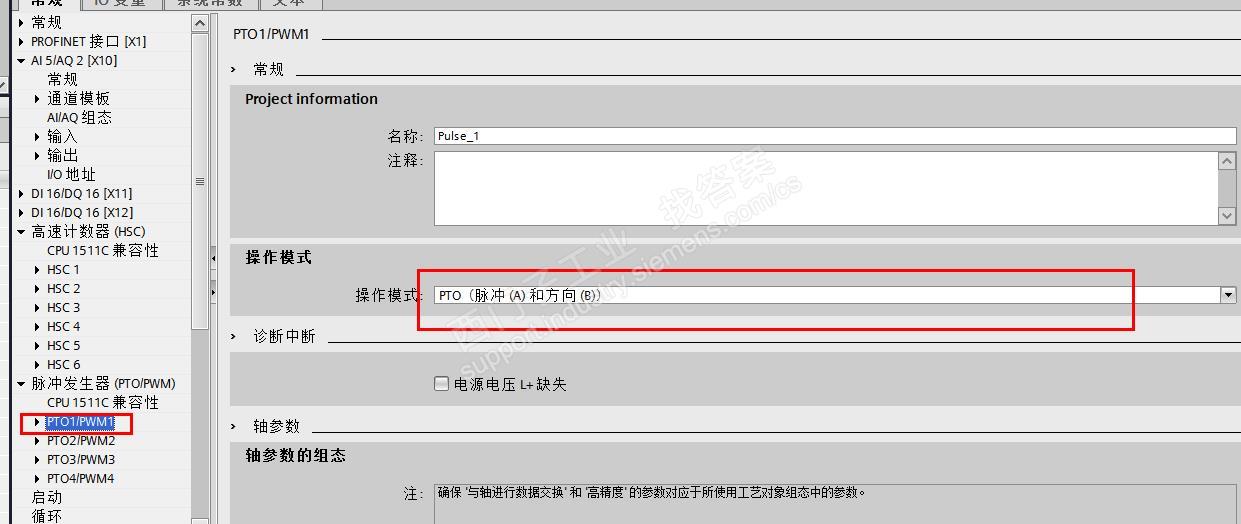
plc中怎么组态啊?我查资料说是1500的plc是具备全闭环功能的,不晓得应该怎么使用,在工艺对象的运动控制中有几种方式,我不知道应该用哪种。
这种方式困扰了我很久,不知道用plc到底怎么解决,请大神帮我解惑,谢谢
小程序查看
手机扫码追踪该问题



 收藏({{answerDetail.Q_FavoriteCounts}})
收藏({{answerDetail.Q_FavoriteCounts}})

 专家置评
专家置评

 等您来回答
换一换
等您来回答
换一换
 {{item.CoinValue}}西币
{{item.CoinValue}}西币
 {{item.VisitNum}}人想问
{{item.VisitNum}}人想问
 本版相关问题
换一换
本版相关问题
换一换

找答案微信小程序

提问

搜索











 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国
 5
5

 问题补充
问题补充 专家建议
专家建议











 本版热门问题
本版热门问题
 {{item.ReadCount}}人关注
{{item.ReadCount}}人关注
 向您推荐
向您推荐

 {{item.VisitNum}}人关注
{{item.VisitNum}}人关注














https://support.industry.siemens.com/cs/document/109749262/simatic-s7-1500-tia-portal-v15-%E4%B8%AD%E7%9A%84-s7%E2%80%911500-motion-control-v4-0?dti=0&lc=zh-CN