矢量控制(Vector Control)也称为磁场定向控制,是一种利用变频器控制三相交流电机的技术。矢量控制实现的基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对异步电动机的励磁电流和转矩电流进行控制,从而达到控制异步电动机转矩的目的。矢量控制分为有编码器的矢量控制和无编码器的矢量控制(SLVC:Sensorless Vector Control),而无编码器的矢量控制是指没有外部传感器用于测量速度,其电机的实际转速是通过电机电流、电压的电气模型计算出的,因此其精度低于带编码器矢量控制。
SLVC控制方式在0Hz左右的低频区,由于电气模型无法精确的计算出转速,因此在低频范围内矢量控制会从闭环切换为开环。此时,对于异步电动机忽略定、转子漏抗,其转矩表达式以及固有机械特性如下所示:
其中是转差的函数,k为常量,为定子电流。
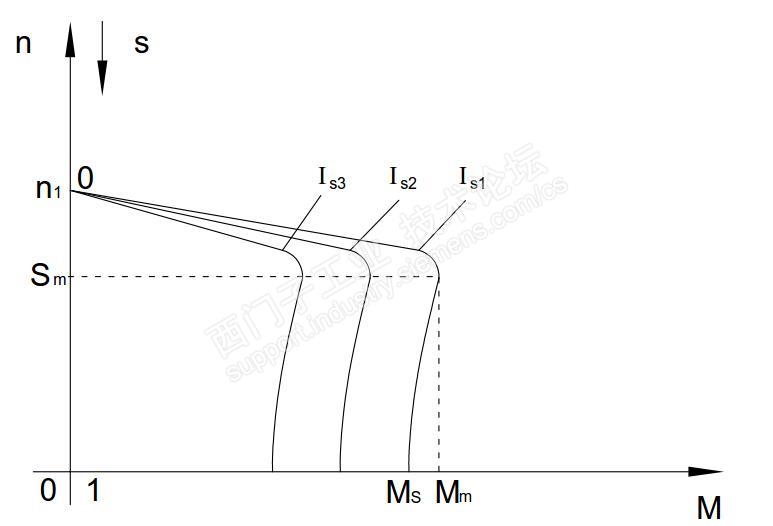
图 1 异步电动机的固有机械特性(Is3 < Is2 < Is1)
由异步电动机固有机械特性可知,当转差率一定的情况下,增加定子电流可以增加转矩,因此在开环控制中,对于静态负载或在加速过程中,可以通过调整转矩上限以内的p1610(静态转矩设定值)和p1611(加速附加转矩)来保证电机的启动和加速过程。当定子电流一定的情况下,当转差率为时,转矩达到最大转矩。SLVC控制模式在闭环控制运行时通过测量定子电流、电压来计算出实际转速,根据需要的转差率来设定定子频率,从而实现最有效的转矩控制。
SLVC控制开环控制和闭环控制的切换条件是由时间条件和频率条件(p1755、p1756和p1758)控制的。如下图所示,
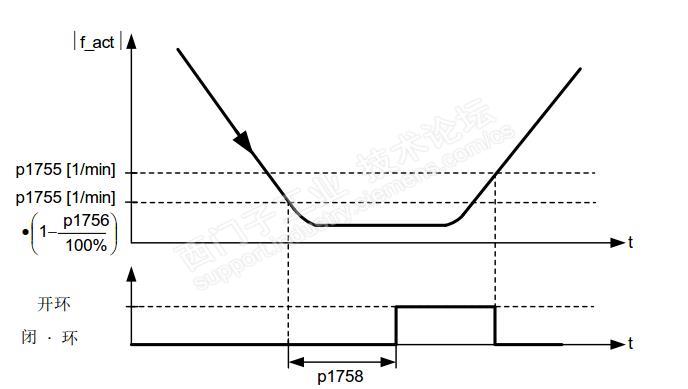
图 2 SLVC的切换前提
如果斜坡函数发生器输入端的设定频率和实际频率同时低于“”,则时间条件p1758无效。
被动负载指只能被电机驱动而不能驱动电机的负载,例如:惰性质量泵、风扇、离心机、挤出机、运行驱动、水平输送装置等。下图为水平传送带带载启动到稳定运行的一个状态曲线,表示电机转矩,表示负载转矩,在0 — 时间段内负载转矩随着电机转矩的增加而增加,一直到时刻负载被拉动,拉动后负载转矩骤降然后随着转速的增加负载转矩慢慢增加一直达到稳态达到恒定的负载转矩,当系统达到稳定转速后电机转矩等于负载转矩。
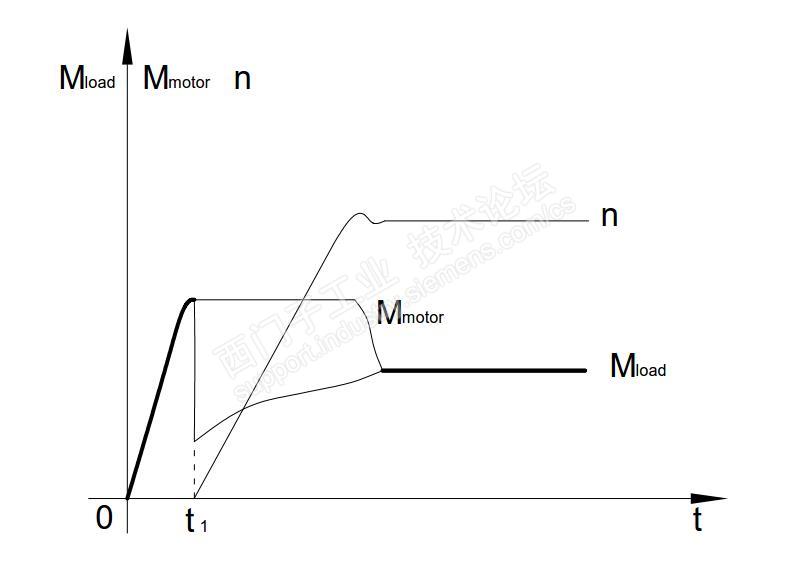
对于这类负载,电机可长时间处于静止状态,无需保持电流。
当使用SLVC(无编码器矢量控制)控制被动性负载时,在 0 Hz 左右的低频区内,模型无法足够精确地计算出电机转速。因此在低频范围内矢量控制会从闭环切换为开环,电机的输出转矩由p1610(静态转矩给定)来决定,如果p1610设置过大可能会导致静止状态下的电机过热、电机速度不稳定,那么能否使被动性负载在0Hz左右的低频区保持速度闭环控制呢?
异步电机在起动点上拖动的是被动负载时,可以在 0 频率点(静止)前一直在闭环控制中稳定运行,不会中途切换到开环控制。参数设置如下所示:
①设置 p0500 = 2(工艺应用 = 无编码器闭环控制中的被动负载,直至 f = 0);
②设置 p0578 = 1(计算工艺相关参数),
此时会自动设置以下参数:
– p1574 = 2 V(使用异步电机时)
– p1574 = 4 V(使用他励同步电机时)
– p1750.2 = 1,被动负载条件下在 0 Hz 前一直在闭环控制中运行
– p1750.3 = 1,电机模型测定饱和特定曲线
– p1802 = 4(RZM/FLB,不进行过调制)
– p1803 = 106 %(出厂设置)
或者直接设置参数p1750.2=1(p1750.3跟随p1750.2自动设置为1)
说明:如果在电机调试内设置了 p0500,就可以通过 p0340 和 p3900 自动计算,p0578 不再需要单独设置。
这种连续的转速闭环控制只限电机拖动被动负载的应用,此时电机可长时间处于静止状态,无需保持电流,在静止状态下仅会向电机注入励磁电流。下图是SLVC中是否激活被动负载功能的曲线对比,在激活被动负载功能后电机在0Hz附近的电流只有励磁电流,明显低于开环控制时的电流。下图1和图2是未激活被动负载与激活被动负载功能的对比:
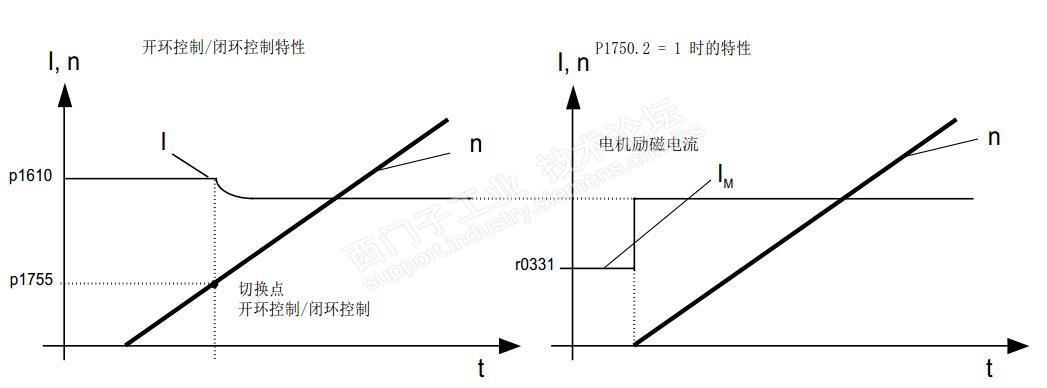
图 1未激活被动负载功能 图 2激活被动负载功能
【案例一】
S120应用于开卷机中,原来配置是带编码器的矢量控制,后因为编码器出现故障,于是将S120的控制方式改为无编码器的矢量控制,在SLVC控制模式下,通过速度控制加转矩限幅的方式来建张,但是在建张过程中出现速度不稳定,拉不紧,用对拖实验模拟现场情况,电机1作为开卷机,为不带编码器的矢量控制模式,速度控制加转矩限幅,电机2为带编码器的矢量控制方式,作为张力辊电机,电机1先以-50rpm转速启动转矩限幅10%,电机2以0转速转矩限幅0%启动,启动后慢慢加转矩先5%然后10%最后加到15%,再加到100%,在转矩慢慢增加的过程中,电机1的输出转矩慢慢增加,一直达到转矩限幅值10%,同时速度慢慢降低趋于0速,由此张力建立,但是在稳定状态,电机的速度和转矩不稳定,左右摇摆,如下图3所示:

图 3异常情
原因分析:在钢卷拉紧过程中,当开卷机实际转速小于p1755*(1-p1756/100%)时经过p1758的时间切换到开环控制模式,模型不准确造成了转矩和转速的波动。
将电机1设置为被动性负载功能(p1750.2=1)后,在相同的启动条件下,达到稳定状态后速度和转矩相对稳定,电机轴保持静止。如下图4所示:
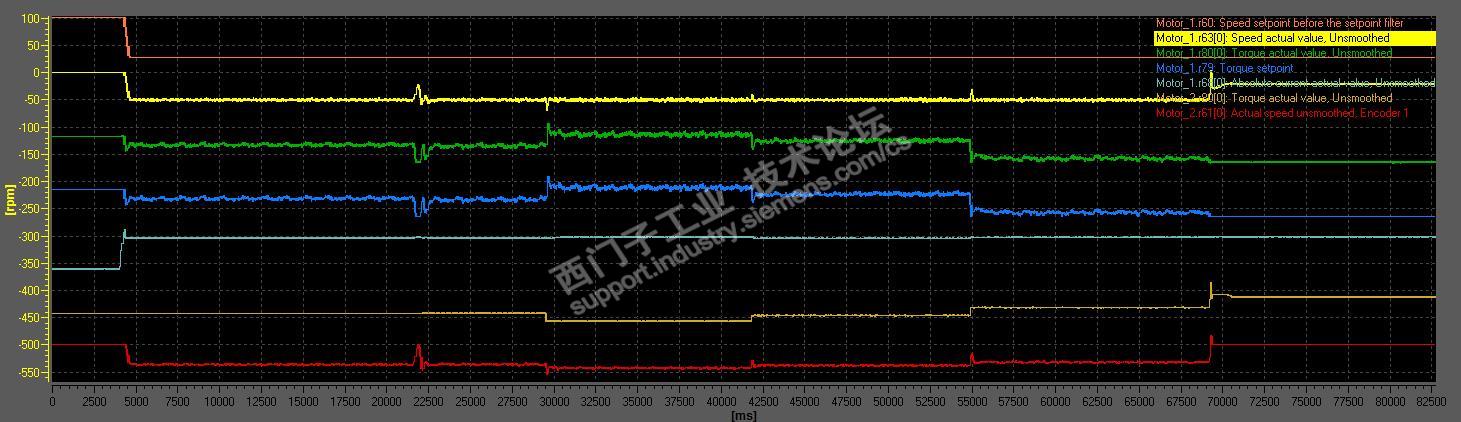
图 4激活被动性负载功能后的情况
【案例二】
S120 SLVC控制模式,控制皮带传输机,因在低频范围内会切换到开环控制模式,为使皮带机能够正常启动,经常将p1610、p1611设置成较大的值,但是由于生产工作中皮带机又经常会在零速下长时间运行,电机零速下通入较大的电流可能会导致电机的过热甚至烧坏绕组。
实验模拟现场情况,电机1为皮带传输机的主电机,无编码器的矢量控制方式,电机2作为皮带或负载,带编码器的矢量控制方式。先启动电机2,以零速20%的转矩启动,然后电机1先以零速启动,然后以速度100RPM(小于p1755切换转速)运行,如图5所示,在零速时励磁电流分量等于绝对值电流等于3.3A,给定转速后电流、速度波动很大。

图 5 SLVC控制模式下启动的情况
当激活被动性负载功能(p1750.2=1)后,同样的启动方式,在零速时励磁电流分量等于绝对值电流等于2.6A等于电机的额定励磁电流,给定速度后电流波动小,同时转矩电流分量建立,如图6所示:
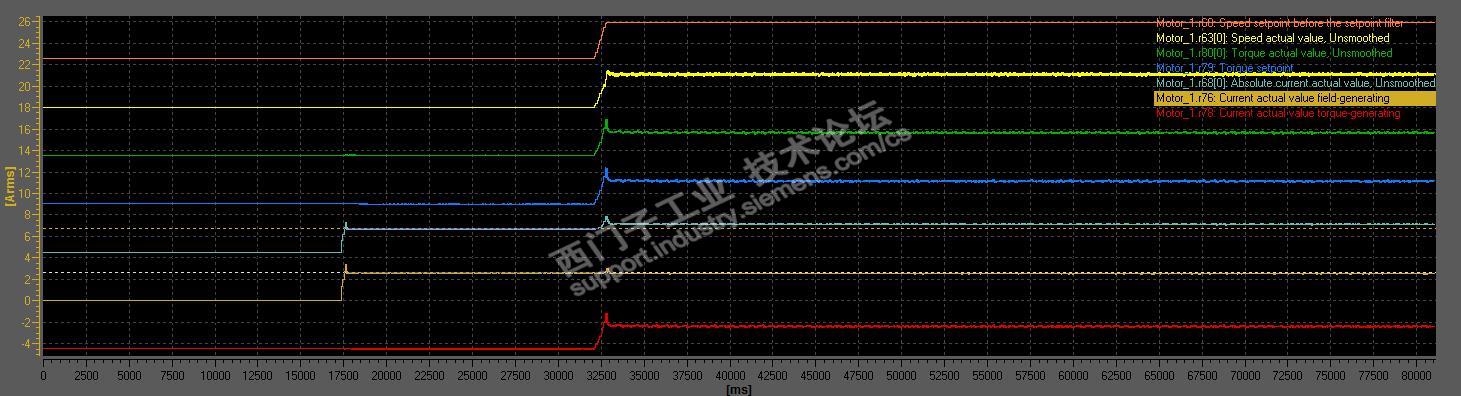
图 6 SLVC控制模式下激活被动负载功能后的启动情况
S120在实际应用中以SLVC模式控制被动性负载时,当激活被动负载功能后,有以下优点:
* 在闭环控制中没有切换操作(工作稳定、无频率骤降、转矩保持恒定)
* 0 Hz 前可一直保持无编码器的转速闭环控制
* 在进入 0 Hz 左右的低频区前可一直保持稳定的转速闭环控制
* 在静止状态下仅会向电机注入励磁电流,电机可长时间处于静止状态
* 相对于开环控制来说,动态响应更快
-------来自 西门子技术支持工程师









 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国


 钻石
钻石



 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐



















 短信登录
短信登录
