以下内容节选自机械工业出版社出版的西门子自动化技术丛书----《SIMATIC S7- 1500 与 TIA博途软件使用指南》, 作者崔坚。更多更详细的内容请您参考《SIMATIC S7- 1500 与 TIA博途软件使用指南》一书。
PID_Compact指令的调用与PID调试示例---调试PID
将项目下载到PLC后,便可以开始对PID控制器进行优化调节。优化调节分预调节和精确调节两种模式。
1) 预调节
首先对PID控制器进行预调节。预调节功能可确定输出值对阶跃的过程响应,并搜索拐点。根据受控系统的最大上升速率与死区时间计算 PID 参数。过程值越稳定,PID参数就越容易计算。预调节步骤如下:
在项目树中双击 “PID_Compact ->调试”,打开调试界面,如图11- 12所示。
在“调节模式”(Tuning mode)下拉列表中选择条目“预调节”(Pretuning)。
单击“Start”图标,系统自动地开始预调节。
当“调节状态”中的“状态”显示为“系统已调节”时,表明预调节已完成。
要使用预调节功能,必须满足以下条件:
在循环中断OB中调用“PID_Compact”指令;
“PID_Compact”指令的ManualEnable和Reset均为FALSE;
PID_Compact处于以下模式之一:“未激活”、“手动模式”、“自动模式”;
设定值和过程值均处于组态的限值范围内,且设定值与过程值的差值大于过程值上限与过程值下限之差的30%。此外,还要求设定值与过程值的差值大于设定值的50% 。
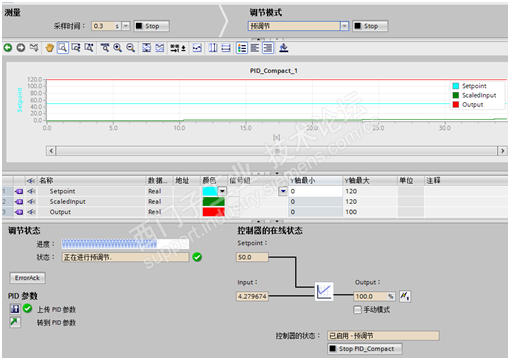
图11- 12 PID_Compact的预调节
2) 精确调节
如果经过预调节后,过程值振荡且不稳定,这时需要进行精确调节,使过程值出现恒定受限的振荡。PID控制器将根据此振荡的幅度和频率为操作点调节 PID 参数。所有 PID 参数都根据结果重新计算。精确调节得出的 PID 参数通常比预调节得出的PID参数具有更好的主控和抗扰动特性,但是时间长。精确调节结合预调节可获得最佳PID 参数。
精确调节步骤如下:
要使用精确调节功能,必须满足以下条件:
在循环中断OB中调用“PID_Compact”指令;
“PID_Compact”指令的ManualEnable和Reset均为FALSE;
设定值和过程值均处于组态的限值范围内;
在操作点处,控制回路已稳定;
无干扰因素影响;
PID_Compact处于以下模式之一:“未激活”、“手动模式”、“自动模式”。

图11- 13 PID_Compact的精确调节
调节结束后,可以将优化调节得出的PID参数上传到离线项目中。为此,可以点击图11- 13中的“上传PID参数”按钮进行参数的上传。为以后方便地使用这些参数,可以在项目树中双击 “PID_Compact” ->“组态”,打开组态界面,并转到在线,如图11- 14所示,然后点击“创建监视值的快照并将该快照的设定值接受为起始值”按钮 ,这样将经过调节得出的PID参数保存在离线项目中。

图11- 14创建监视值的快照并将该快照的设定值接受为起始值
注意:
如果在开始阶段直接进行精确调节,则会先进行预调节然后再进行精确调节。









 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国

 黄金
黄金


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐



















 短信登录
短信登录
