wincc版本:v7.5 sp2 up11
tia版本:v18
net版本:v18
step7版本:v5.5 sp4(安装这个有助于wincc和新版本固件PLC通信)
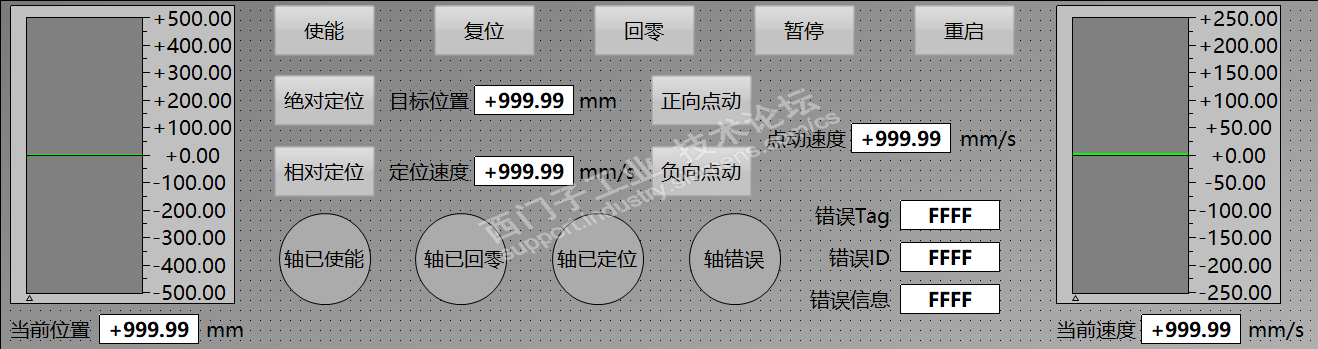
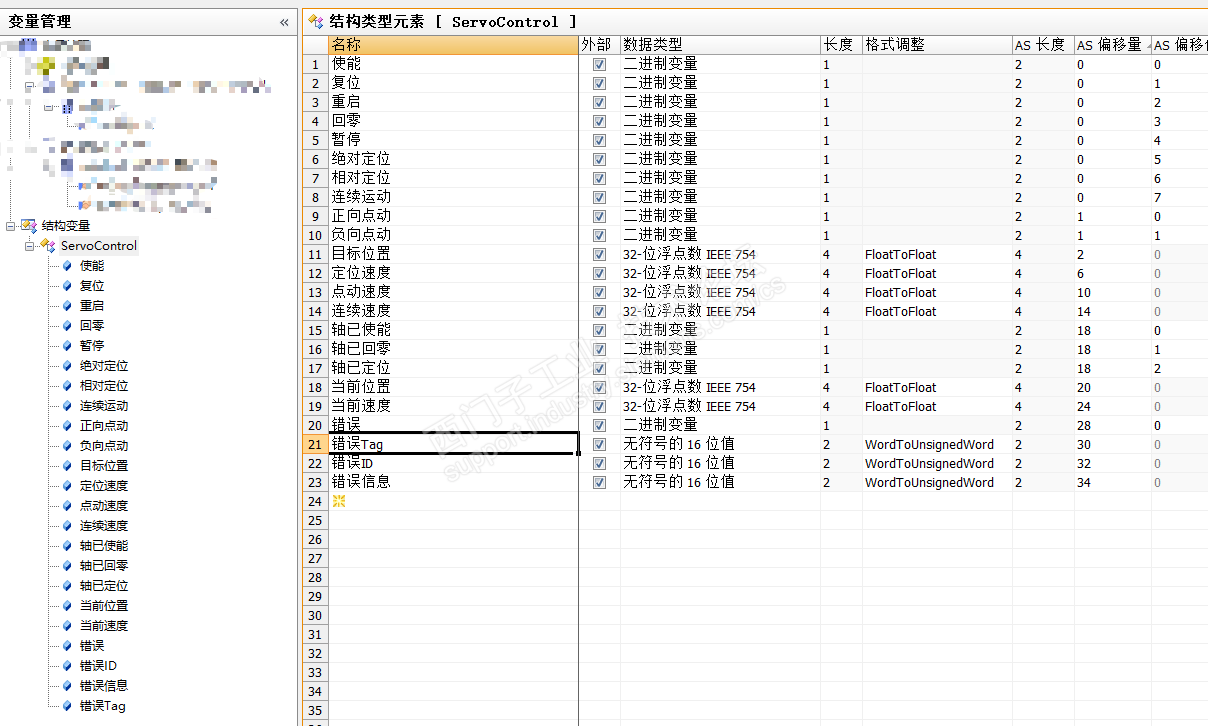
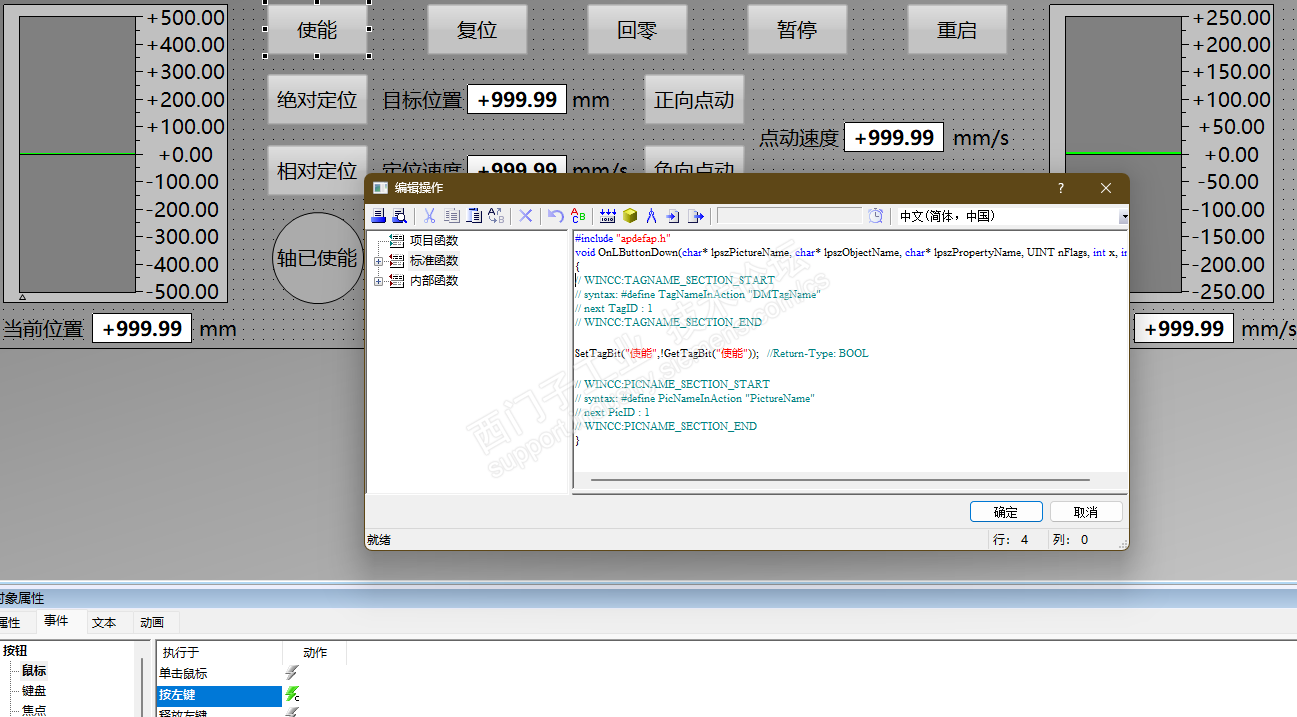
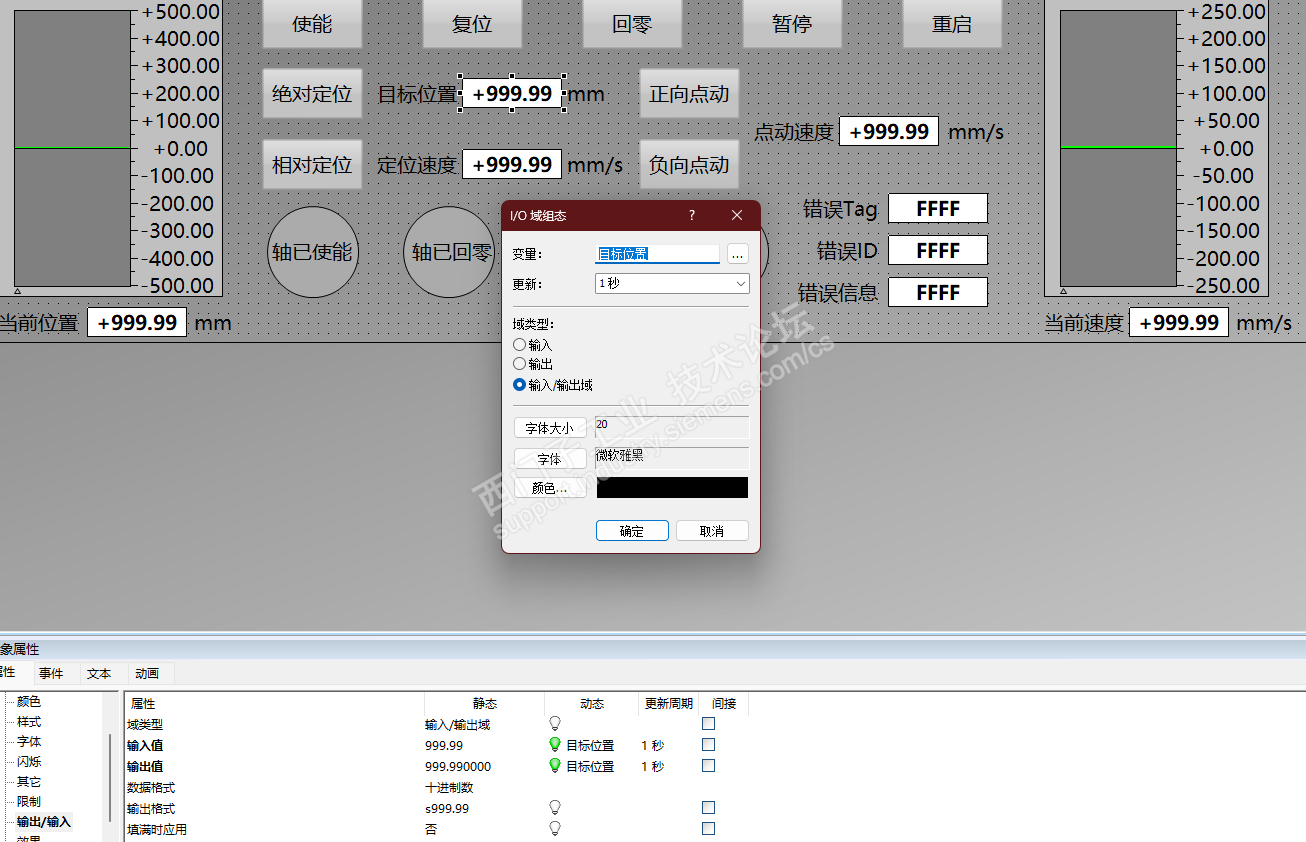

结构变量+变量前缀,之前都是做画面模板弹窗,这个直接就在主画面显示了……
博图软件这边工艺轴编程如下:
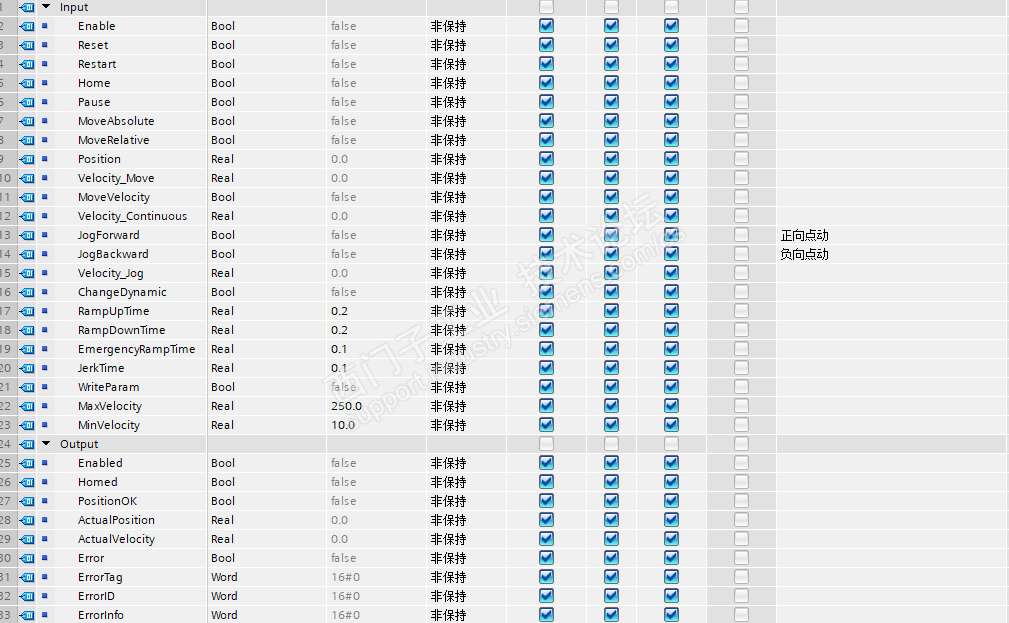
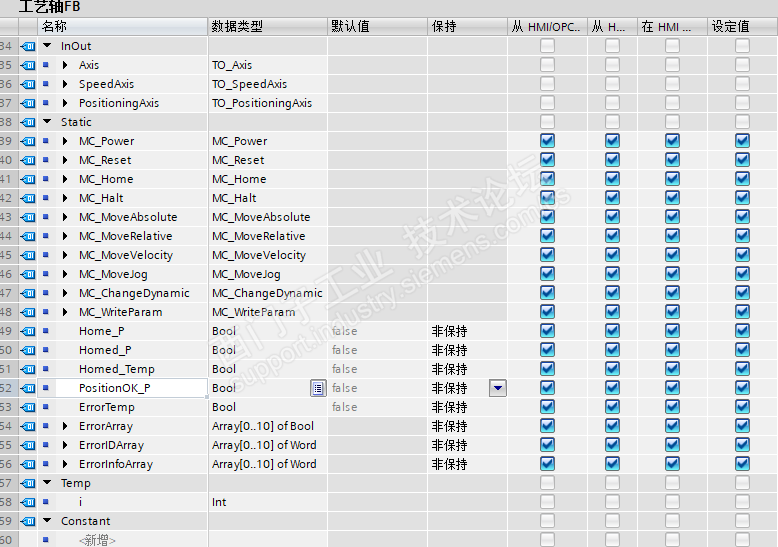
程序内容如下:
REGION 使能
#MC_Power(Axis := #Axis,
Enable := #Enable,
StartMode := 1,
StopMode := 0,
Status => #Enabled,
Error => #ErrorArray[0],
ErrorID => #ErrorIDArray[0],
ErrorInfo => #ErrorInfoArray[0]);
END_REGION
REGION 复位
#MC_Reset(Axis := #Axis,
Execute := #Reset,
Restart := #Restart,
Error => #ErrorArray[1],
ErrorID => #ErrorIDArray[1],
ErrorInfo => #ErrorInfoArray[1]);
END_REGION
REGION 回零
#MC_Home(Axis := #Axis,
Execute := #Home,
Position := 0.0,
Mode := 0,
Error => #ErrorArray[2],
ErrorID => #ErrorIDArray[2],
ErrorInfo => #ErrorInfoArray[2]);
IF #MC_Home.Done AND NOT #Homed_P THEN
#Homed := TRUE;
#Homed_Temp := TRUE;
ELSIF (#Home AND NOT #Home_P) OR NOT #Enable THEN
#Homed := FALSE;
#Homed_Temp := FALSE;
END_IF;
#Homed_P := #MC_Home.Done;
#Home_P := #Home;
END_REGION
REGION 暂停
#MC_Halt(Axis := #SpeedAxis,
Execute := #Pause,
Error => #ErrorArray[3],
ErrorID => #ErrorIDArray[3],
ErrorInfo => #ErrorInfoArray[3]);
END_REGION
REGION 绝对定位
IF #Homed_Temp THEN
#MC_MoveAbsolute(Axis := #PositioningAxis,
Execute := #MoveAbsolute,
Position := #Position,
Velocity := #Velocity_Move,
Direction := 3,
Error => #ErrorArray[4],
ErrorID => #ErrorIDArray[4],
ErrorInfo => #ErrorInfoArray[4]);
END_IF;
END_REGION
REGION 相对定位
#MC_MoveRelative(Axis := #PositioningAxis,
Execute := #MoveRelative,
Distance := #Position,
Velocity := #Velocity_Move,
Error => #ErrorArray[5],
ErrorID => #ErrorIDArray[5],
ErrorInfo => #ErrorInfoArray[5]);
END_REGION
REGION 定位完成
IF (#MC_MoveAbsolute.Done OR #MC_MoveRelative.Done) AND NOT #PositionOK_P THEN
#PositionOK := TRUE;
ELSIF #MoveAbsolute OR #MoveRelative OR NOT #Enable THEN
#PositionOK := FALSE;
END_IF;
#PositionOK_P := #MC_MoveAbsolute.Done OR #MC_MoveRelative.Done;
END_REGION
REGION 连续运动
#MC_MoveVelocity(Axis := #SpeedAxis,
Execute := #MoveVelocity,
Velocity := #Velocity_Continuous,
Direction := 0,
Error => #ErrorArray[6],
ErrorID => #ErrorIDArray[6],
ErrorInfo => #ErrorInfoArray[6]);
END_REGION
REGION 点动
#MC_MoveJog(Axis := #SpeedAxis,
JogForward := #JogForward,
JogBackward := #JogBackward,
Velocity := #Velocity_Jog,
Error => #ErrorArray[7],
ErrorID => #ErrorIDArray[7],
ErrorInfo => #ErrorInfoArray[7]);
END_REGION
REGION 更改加减速参数
#MC_ChangeDynamic(Axis := #SpeedAxis,
Execute := #ChangeDynamic,
ChangeRampUp := TRUE,
RampUpTime := #RampUpTime,
ChangeRampDown := TRUE,
RampDownTime := #RampDownTime,
ChangeEmergency := TRUE,
EmergencyRampTime := #EmergencyRampTime,
ChangeJerkTime := TRUE,
JerkTime := #JerkTime,
Error => #ErrorArray[8],
ErrorID => #ErrorIDArray[8],
ErrorInfo => #ErrorInfoArray[8]);
END_REGION
REGION 更改最大速度和启动速度
IF NOT #MC_Power.Status THEN
#MC_WriteParam(Execute := #WriteParam,
Parameter := #PositioningAxis.DynamicLimits.MaxVelocity,
Value := #MaxVelocity,
Error => #ErrorArray[9],
ErrorID => #ErrorIDArray[9],
ErrorInfo => #ErrorInfoArray[9]);
#MC_WriteParam(Execute := #WriteParam,
Parameter := #PositioningAxis.DynamicLimits.MinVelocity,
Value := #MinVelocity,
Error => #ErrorArray[10],
ErrorID => #ErrorIDArray[10],
ErrorInfo => #ErrorInfoArray[10]);
END_IF;
END_REGION
REGION 当前状态
#ActualPosition := #PositioningAxis.ActualPosition;
#ActualVelocity := #PositioningAxis.ActualVelocity;
END_REGION
REGION 标记错误位置
IF NOT #ErrorTemp AND NOT #Reset THEN
FOR #i := 0 TO 10 DO
IF #ErrorArray[#i] THEN
#ErrorTag := INT_TO_WORD(#i);
#ErrorID := #ErrorIDArray[#i];
#ErrorInfo := #ErrorInfoArray[#i];
#Error := TRUE;
#ErrorTemp := TRUE;
EXIT;
END_IF;
END_FOR;
ELSIF #Reset THEN
#ErrorTag := 16#0000;
#ErrorID := 16#0000;
#ErrorInfo := 16#0000;
#Error := FALSE;
#ErrorTemp := FALSE;
END_IF;
END_REGION
总体思路:利用指令→工艺→Motion_Control
错误标识:for循环,按从小到大优先级,记录错误标签,赋值相应标签的错误ID和错误信息。由复位按钮复位错误。
有不对之处,欢迎斧正









 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国

 白金
白金



 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐



















 短信登录
短信登录
