| 作者 | 主题 |
|---|---|
|
绫 总坛主 

经验值:15514 发帖数:1556 精华帖:115 |
楼主
主题:【周三技术工坊】虚拟调试和实际设备如何同步运行 
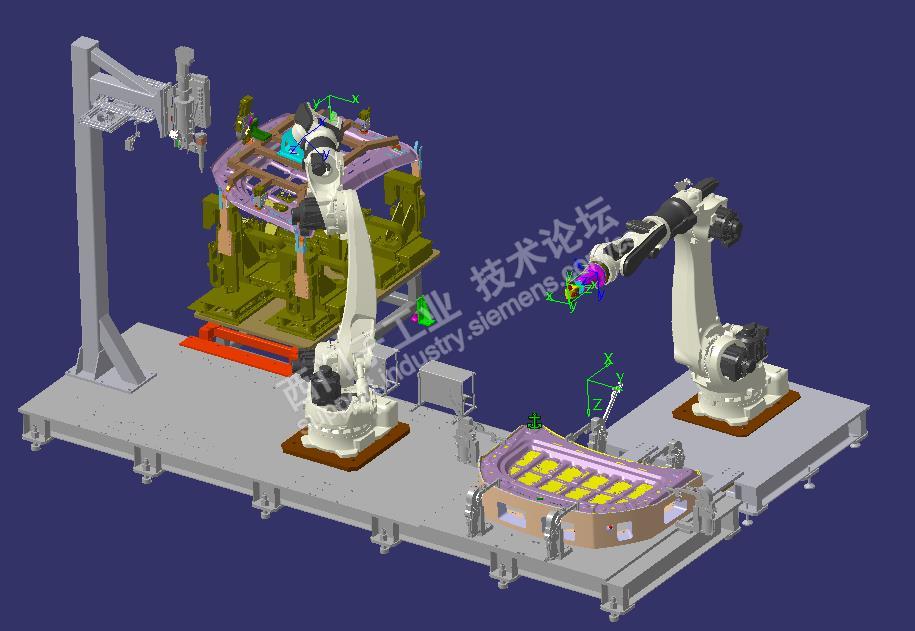
算了算已经连续出差四十八天了,领导按常规操作应该发邮件让我回公司调休了,怎奈迟迟没有音信,果断拿起手机,一番诉苦之后,不久航旅纵横软件发来消息:”您有新的航班信息,请查收”。至此,不仅踏上了回家的路程,也扛起了一个重任,领导让我和虚拟仿真工程师一起调出一套“数字化滚边工作站”,要去上海工博会参展。 “数字化滚边工作站”总览图如图1所示。 如今虚拟调试( Virtual Commissioning)技术可以将整条生产线的机械,电气和控制三大系统整合在一起进行模拟,极大地提高了企业对新生产系统整体运转时可能发生问题的认知度,从而在未投入正式制造之前对系统进行验证和优化,修补漏洞。达到进一步地缩短产品推出周期,降低工程成本和风险的目的。
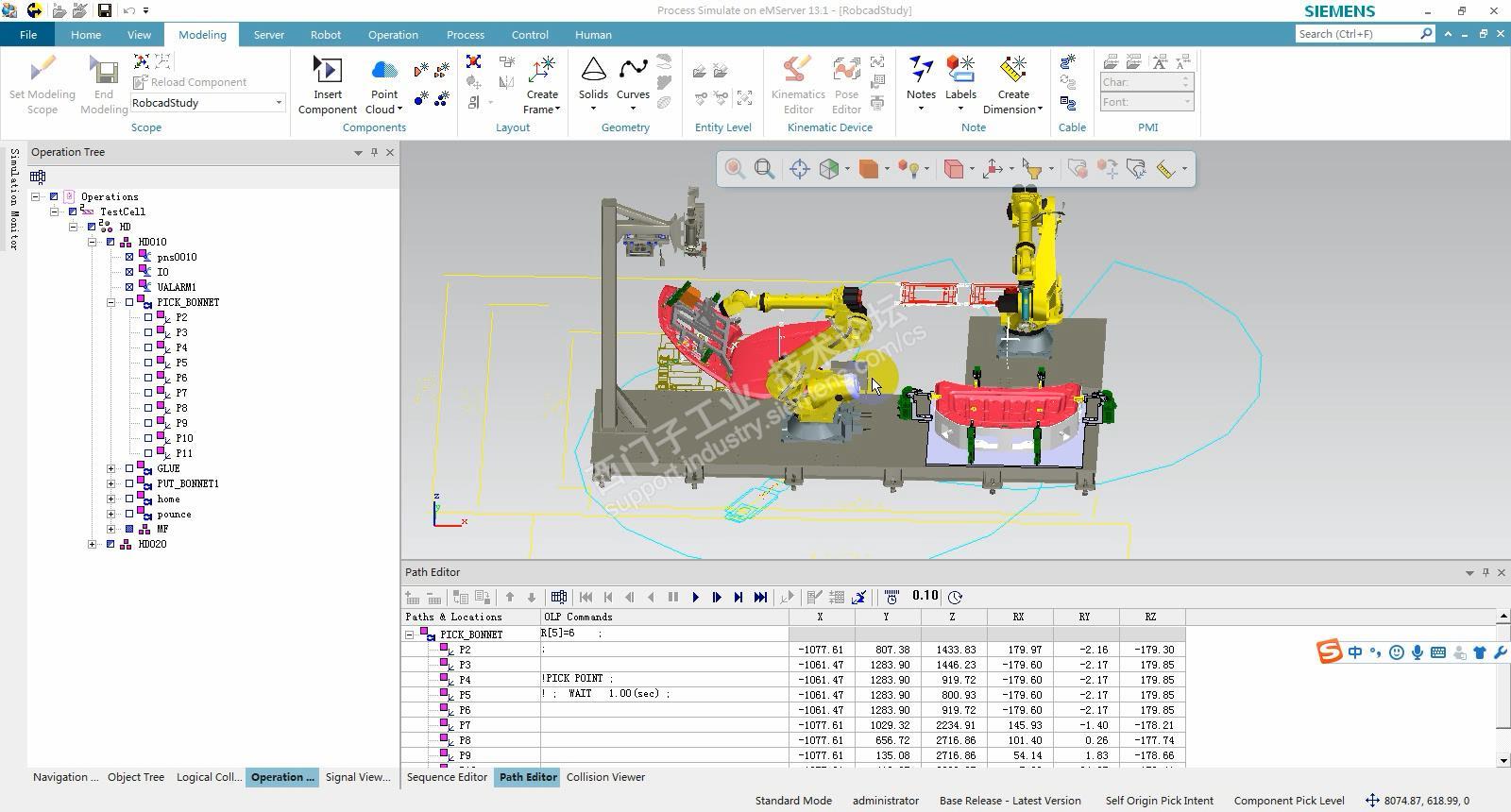
图1.数字化滚边工作站 在这个项目中所用到的设备和软件: 硬件:PLC硬件为西门子CPU 1517F-3 PN/DP 两台PC电脑 两台Fanuc机器人 软件:TIA V14 SP1 (PLC软件 包含PLCSim仿真模块) SIMATIC_NET_821 (用来建立OPC服务器) Process Simulate 13.1(版本没有具体要求,需要安装对应品牌机器人控制器) 虚拟调试软件如图2所示。
图2.虚拟调试软件 经过两周的钻研和调试,PLC与虚拟调试软件在电脑端的虚拟仿真运行大功告成,同时PLC控制机器人工作站运行也比较稳定,万事俱备,只欠东风,就等领导拍板,打包发货了,不过也果然不出所料,做事稳重严谨的领导要求我们把电脑端虚拟仿真运行的速度和实际工作站机器人运行保持同步,在我们实际的观察中也确实发现,电脑端仿真运行速度明显快于实际机器人运行速度,通过降低电脑的仿真速度,加快实际机器人运行速度,两者的循环完成周期还是差1.5s左右的时间,经过分析,由于实际夹具打开关闭的速度无法保证,且机器人有加减速时间,这1.5s不能完全消除,只是尽可能的减小,但是我们也发现随着循环次数的增加,误差不断累积,在最后几次的循环中,依旧“惨不忍睹”。 多年的调试经验告诉我,这种问题不能心烦,认真的观察它们之间的运动,边看边想,灵光一闪,我既然无法消除单次循环周期误差1.5s,那我保证两者同步起动不就可以消除累计误差了嘛,最终通过PLC收到两者运行完成信号,延时1s,同时发送起动信号给电脑端仿真软件和实际工作站,两者同时起动,最终的运行效果确实要比以往“优美”的多。 最终, 看着自己调试的设备在展会上稳定高效的运行,还发布到了公司公众号上,心中还难免有了一丝丝“自豪”,为自己能不断学习到新的知识和技术而高兴。 -------来自 西门子技术支持工程师 |










 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城













 短信登录
短信登录
