| 作者 | 主题 |
|---|---|
|
寒星 游民 经验值:96 发帖数:36 精华帖:0 |
楼主
主题:如何高速给定6RA70?
我的应用为:PC机以通讯方式控制6RA70,要求最慢10ms给定一个速度指令,请高手指点方案,如何实现? 我曾用VB编程采用USS协议通讯做过,但最快只能达到50ms给定一次。
另外,有三个profibus-dp的绝对值编码器,要求PC机每10ms采集一次数据,用WINCC最简单,但响应太慢;考虑用VB+WINAC实现,WINAC做通讯,VB做界面,VB与WINAC通过computing或Simatic net opc通讯,不知各位高手有什么更好的方案,望不吝赐教。 |
|
老兵veteran 版主 经验值:59630 发帖数:10036 精华帖:506 |
楼
 主题:回复:如何高速给定6RA70?
主题:回复:如何高速给定6RA70?
只要通过通讯给数度给定,无论如何也是做不到10ms周期的,因6RA70本身对通讯数据的处理就是20ms
天生不宜做胜利者,自来没有胜利的欲望,只是不甘失败,十分十分不甘心失败。木心
|
|
老兵veteran 版主 经验值:59630 发帖数:10036 精华帖:506 |
楼
主题:回复:如何高速给定6RA70?
受KDRJL老师所命,今天做了两个实验来分析6RA70的计算周期和响应周期:
首先以S7-400为主站,6RA70为从站,二者之间走PROFIBUS-DP协议,网速1.5M。在主站中编一速度给定程序,即每隔100ms(用的是定时中断)速度增加20%,然后在6RA70中用DRIVEMONITOR跟踪,如下面两个图所示。从图中可以看出,速度给定每次变化的周期就是3.33ms,并两次之间的间隔为100ms。从而说明6RA70对关键数据的的计算周期应为3.33ms(50HZ情况下) 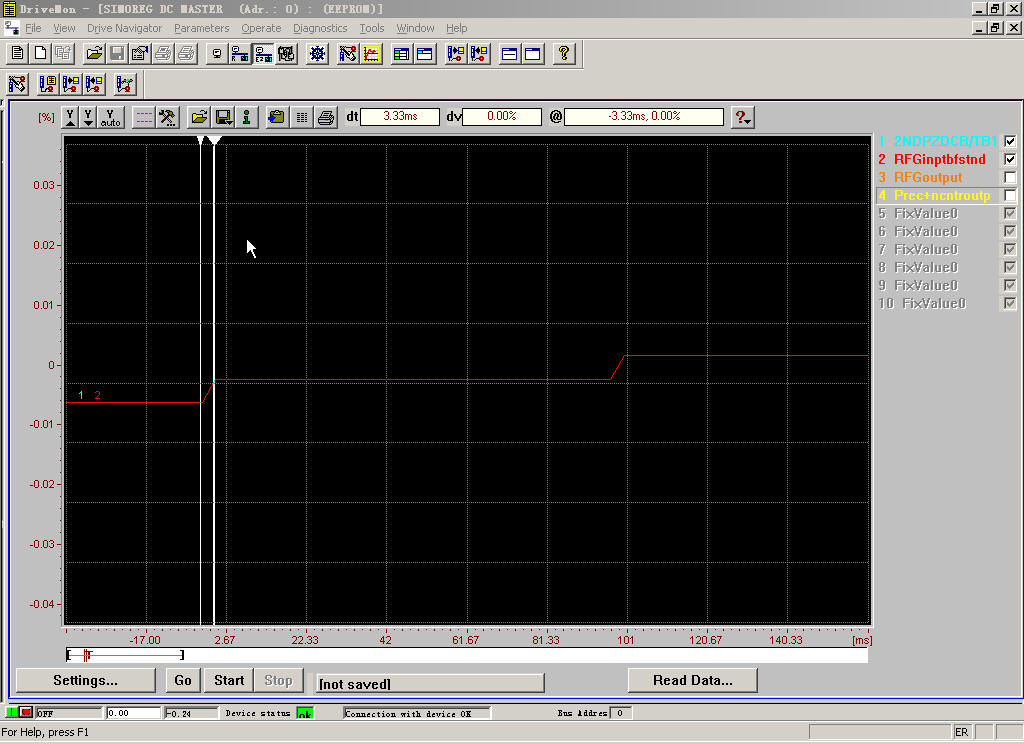
天生不宜做胜利者,自来没有胜利的欲望,只是不甘失败,十分十分不甘心失败。木心
|
|
老兵veteran 版主 经验值:59630 发帖数:10036 精华帖:506 |
楼
主题:回复:如何高速给定6RA70?
最后一张图表示的是在负载为纯阻性负载,速度环为纯P发生器的情况下的电流响应曲线。可以看出在实际电流第一次达到给定(100%)的时间仅为6.66ms。当然这个曲线有超调,我想原因是因我做这个实验时没做任何优化,所用参数都为缺省值的原因,即参数不是最优。但我认为这不影响实验结论,即:系统的响应时间也可以控制在10ms之内,甚至达到3.33ms。当然了,如果考虑到电感和机械的影响,那是怎么也达不到的。

天生不宜做胜利者,自来没有胜利的欲望,只是不甘失败,十分十分不甘心失败。木心
|
|
萧峰 游士 经验值:279 发帖数:108 精华帖:1 |
楼
主题:回复:如何高速给定6RA70?
楼主呀,你的问题还不仅仅出现在传动装置的实际响应速度一个方面,最主要的是,你的控制对象有多快的响应速度。。。。。一般情况下被控对象(比如电机)的响应速度要远远低于传动装置的力矩响应速度(40ms),所以你给定速度再快,执行机构跟不上也是白给。。。。。这应该是个系统问题,在项目前期就应该考虑。
据说,电流环和速度环的运行周期是不同的,即:电流环可能是几毫秒调用一次,而速度环可能几十毫秒调用一次。 不知各位同学有何见教。 |
|
不得不爱 侠士 经验值:1517 发帖数:487 精华帖:6 |
楼
主题:回复:如何高速给定6RA70?
好帖!学习了,另帖一份6RA70的动态特性参数:
Dynamic characteristic quantities of a control system Current controller rise time approx. 6 - 9 ms Speed controller rise time approx. 25 ms 所以速度环在实际应用中应高于25ms。
You are beautiful It's true
|
|
不得不爱 侠士 经验值:1517 发帖数:487 精华帖:6 |
楼
主题:回复:如何高速给定6RA70?
这些数据是我在网上下载的一个西门子DC MASTER 培训资料里面所提到的。
这里的rising time其实就是斑斑提到的阶跃响应时间(step response), 事实上我这里还有几个数据只是与本帖讨论内容无关,不过我自己并不能理解,故也帖出来问问: Current controller rise time approx. 6 - 9 ms Speed controller rise time approx. 25 ms Zero-torque interval at torque reversal 0.5 - 3.3 ms Cut-off frequency of the current control loop approx. 47 Hz Cut-off frequency of the speed control loop approx. 24 Hz 后面3个数据是什么意思呢?请教各位大大了! (若等级够上传附件我将上传此参数截图)
You are beautiful It's true
|
|
俱怀逸兴壮思飞 至圣 经验值:13134 发帖数:5007 精华帖:106 |
楼
主题:回复:如何高速给定6RA70?quote:以下是引用不得不爱在2008-01-10 09:05:54的发言: 事实上我这里还有几个数据只是与本帖讨论内容无关,不过我自己并不能理解,故也帖出来问问: Current controller rise time approx. 6 - 9 ms Speed controller rise time approx. 25 ms Zero-torque interval at torque reversal 0.5 - 3.3 ms Cut-off frequency of the current control loop approx. 47 Hz Cut-off frequency of the speed control loop approx. 24 Hz 后面3个数据是什么意思呢?请教各位大大了! 1、转矩反向时的无转矩时间,你也可以理解为一种转矩过零时的死区; 2、电流环的截止频率为47 Hz; 3、转速环的截止频率为24 Hz。 关于2、3中的截止频率概念,你若没接触过可以参考一下《自动控制原理》一书中关于闭环控制部分。 |
|
天枰 侠士 经验值:1086 发帖数:315 精华帖:10 |
楼
主题:回复:如何高速给定6RA70?
真不知道为什么要讨论这种问题?假如你做硬件设计你会怎么做?
50Hz电源,周期为20ms,对于6脉波整流,需要在一个周期内触发六个可控硅, 即3.3ms触发一个,对于16位微处理器,几K程式要在1ms内扫描一次是很容易的,但不论处量多快,输出只能在3.3ms内调节一次,因此那个控制环节的扫描周其都不会比这一值高;对于电流/转矩内环,我想你一定会让它在3.3ms扫描一次,这样可以提高控制精度,但更快的速率没有任何意义;对于速度环,你会多长时间计算一次,如果是我的话,我会6.6ms计算一次,即比内环加长一倍;对于给定值我会把周期再加长一倍,即13.2ms算一次;对于反速度反馈只要和当前环的速度相当就可以了,但为了提高抗干扰能力,我会用比相应环节周期更快的速度扫描,然后滤波;就是说对于电流信号的采集会比3.3ms更短,这样系统可以知道在每个触发脉冲发出后更详尽的电流变化情况,对于防止管子损坏有利;现有假设我们使用速度控制(这个假设很可能是成立的),系统对速度环的计算周期为13.2ms,则通讯周期应<13.2ms,考虑到有人可能要用到转矩控制,因此单从设计方面考虑,系统的通讯周期应小于3.3ms,再考虑一下通讯速率,1位启始位,8位数据位,一位停止位,一位奇偶校验位,一个字节总共要发送11bit,USS标准协议有两个PZD字,至少三个PKW字,一个启始标志字节,一个校验字节,一个长度字节,一个地址字节,因此一个报方最少14个字节,然后我们一般会在两个报方之间留3个字节的间隙,就是说一帖数据需要17*11/19.2=9.74ms,这介大家常用的19.2K通讯速率下的时间,那么你发一次,系统给你发一次需要19.5ms,因此如果你想要传送更快或着高精度的话,就不能使用标准的USS协议,也不要用于速度环。对于带外环的控制,低于10ms的通讯速率没有多大意义,当然转矩控制例外... |
|
俱怀逸兴壮思飞 至圣 经验值:13134 发帖数:5007 精华帖:106 |
楼
主题:回复:如何高速给定6RA70?
首先,我们说说什么叫截止频率——
当保持电路输入信号的幅度不变,改变频率,使输出信号降至最大值的0.707倍时,该频率称为截止频率。 这样说,可能大家还是会觉得不太好理解。那我们就通俗地说—— 系统只通过一定范围的频率的信号,倘若超过了这个频率范围,信号就会大幅衰减,在输出端得到的值很小了。 |
|
俱怀逸兴壮思飞 至圣 经验值:13134 发帖数:5007 精华帖:106 |
楼
主题:回复:如何高速给定6RA70?
再补充一点,一旦我们确定了电流环、转速环所期望的截止频率,实际上就是确定了内外环的幅频特性,就可以求出相应的电流环、转速环的PID调节器参数了。
|











 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 自动化标准机型应用中心
自动化标准机型应用中心 官方商城
官方商城






