| 作者 | 主题 |
|---|---|
|
合 奇侠 经验值:6044 发帖数:3917 精华帖:20 |
楼主
主题:应用探讨—PID应用探讨深入一
在前一阶段,我们讨论了“软件PID功能块的使用”等基础问题,其讨论整理可参见此处。
在此交流基础上,我们可以继续进行应用举例的收集和探讨。 如:正作用/反作用,开阀/关阀,单冷/单热/双向调节,张力调节等应用示例。 欢迎大家畅所欲言,提出您在工程项目中所遇到的实际情况,让我们可以共同分享或是寻找更优方案,相互探讨和学习! 此次集中探讨将持续至1月7日,其中有突出表现的网友将获得加倍精华奖励积分;最终所有有效留帖的网友将获得加倍发帖积分;根据交流情况,会酌情赠送小礼品。 交流结束后也将专门整理重要内容,供广大网友分享参考。 预祝大家交流愉快,收获丰富! |
|
Zane 版主 经验值:85161 发帖数:21047 精华帖:399 |
18楼
 主题:回复:应用探讨—PID应用探讨深入一
主题:回复:应用探讨—PID应用探讨深入一
哈,观察了这些天,大家的讨论都有些不对题啊,今天还是言归正传。
话题1:如何实现PID增量式算法 最近论坛里有讨论增量式PID算法的实现,连接如下 http://www.ad.siemens.com.cn/club/bbs/post.asp?b_id=4&a_id=737326&s_id=0&num=11#anch 位置式PID控制的输出与整个过去的状态有关,用到了误差的累加值;而增量式PID的输出只与当前拍和前两拍的误差有关,因此位置式PID控制的累积误差相对更大 增量式PID控制输出的是控制量增量,并无积分作用,因此该方法适用于执行机构带积分部件的对象,如步进电机等,而位置式PID适用于执行机构不带积分部件的对象,如电液伺服阀 由于增量式PID输出的是控制量增量,如果计算机出现故障,误动作影响较小,而执行机构本身有记忆功能,可仍保持原位,不会严重影响系统的工作,而位置式的输出直接对应对象的输出,因此对系统影响较大。 大家比较熟悉的FB41,FB58都是典型的位置型算法,然而大家有没有注意到FB42,FB59所谓的STEP CONTROLLER?只不过其输出是脉冲式开关量的。 而对于模拟式的执行机构,我们可以用一个递归式A=A+B来实现,其中A为闭环控制最终的累加输出值,而B则为PID的输出值,趋于稳定时,B的值应为0. 管理员注:本帖已被纳入此次探讨发帖整理,请点此详阅。
Zane
注册自动化系统工程师
Always save before download
|
|
西门子Auto 官方工程师 经验值:2462 发帖数:126 精华帖:16 |
95楼
主题:回复:应用探讨—PID应用探讨深入一
1. 电加热控温系统
测温(输入)热电阻或热电偶 控温(输出)由固态继电器控制的电热丝 采用FB58,系统用到 1AI +1DO 建议增加1DO用于控制加热电源的接触器,只有在主接触输出才使能PID输出,这样做的好处是,当固态继电器损坏直通时,确保加热电源是断开的  建议采用手册中介绍的S7-300模式(模式2),这个程序结构在S7-300/400中是通用的,同时应用灵活方便,具体参考《1_SIMATIC S7-300400版区软件PID功能块的使用探讨整理》一文 SELECT = 1(OB1) 2(OB35) COM_RST = 建议采用加热电源的接触器状态控制COM_RST PVPER_ON = TRUE PV_PER = PIW256 建议采用热电偶、热电阻模拟量直接输入,采用硬件滤波方式 MAN_ON = FALSE PID_ON = TRUE CYCLE = 4s CYCLE_P = 20ms 建议采用周波的倍数 控制精度0.5% 即OB35的中断周期 PER_TM = CYCLE = 4s PULSE_ON = TRUE QPULSE = Q0.0 (PWM输出) CONZ _ON = TRUE CON_ZONE = 10.0 LMN_HLM = 100.0 LMN_LLM = 0.0 点击此处查看附件 管理员注:本帖已被纳入此次探讨发帖整理,请点此详阅。 |
|
西门子Auto 官方工程师 经验值:2462 发帖数:126 精华帖:16 |
96楼
主题:回复:应用探讨—PID应用探讨深入一
2. 挤出机中一个控温区的双向控温
测温(输入) 热电偶 控温(加热输出) 固态继电器控制的加热管 (冷却输出) 固态继电器控制的冷却水开关阀 采用 FB58 + FB43 系统用到1AI + 2DO  FB58 仍旧推荐使用模式2的应用方式,OB1中调用FB58模式1,OB35中调用FB58模式2及FB43 FB 58参数 SELECT = 1(OB1) 2(OB35) COM_RST = OB100初始化 PVPER_ON = TRUE PV_PER = PIW256 建议采用热电偶、热电阻模拟量直接输入,采用硬件滤波方式 MAN_ON = FALSE PID_ON = TRUE CYCLE = 4s 采样周期 CYCLE_P = 20ms 建议采用周波的倍数 控制精度0.5% 即OB35的中断周期 PER_TM = CYCLE = 4s CONZ _ON = TRUE CON_ZONE = 10.0 LMN_HLM = 100.0 LMN_LLM = -100.0 FB43参数 COM_RST = OB100初始化 MAN_ON = FALSE STEP3_ON = FALSE ST2BI_ON = TRUE INV = TCONT.LMN CYCLE = 20ms 即OB35中断周期 PER_TM = 4S 即采样周期 RATIOFAC = 1.0 由于加热与制冷的惯性不一样,调节此倍率参数使系统的加热制冷的惯性趋于一致 QPOS_P = Q0.0 加热PWM输出 QNEG_P =Q0.1 制冷PWM输出 点击此处查看附件 管理员注:本帖已被纳入此次探讨发帖整理,请点此详阅。 |
|
西门子Auto 官方工程师 经验值:2462 发帖数:126 精华帖:16 |
97楼
主题:回复:应用探讨—PID应用探讨深入一
3. 具有定速牵引的收线装置的控制
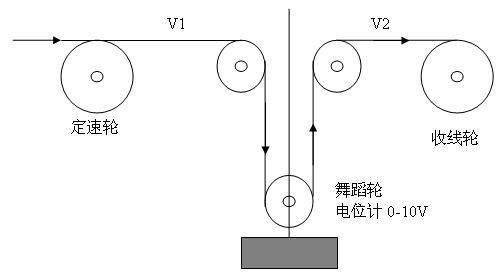 由上图可以得知,线材张力由舞蹈轮的自重决定,是恒定的;牵引轮出线速度V1是恒定的;收线轮随着卷径的增大,V2有增大的趋势,舞蹈轮会被提起;当通过闭环控制使舞蹈轮在垂直方向的位置不变时,V1=V2,从而实现恒张力恒线速卷取 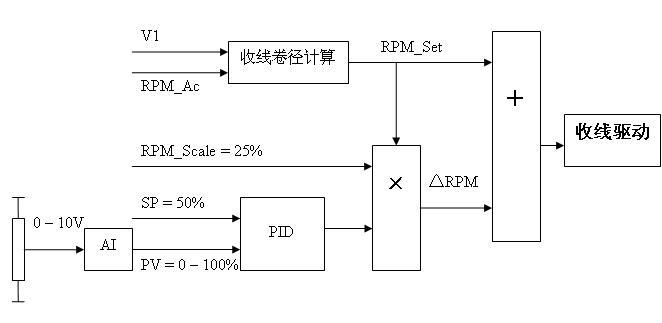 这是一个典型的前馈+PID微调的应用,建议采用FB41做微调闭环运算,OB35中直接调用,中断周期 5- 20 ms。不建议采用FB41的DISV做前馈通道,这里的前馈是主通道,而PID是辅助通道,这样程序的灵活性会有所限制。 FB41参数 COM_RST CYCLE = 10ms MAN_ON = FALSE 可以利用手动功能暂时禁止PID微调功能 MAN = 0.0 PVPER_ON = TRUE PV_PER = PIW 256 舞蹈轮电位计 0-10V 反馈,直接输入,采用硬件滤波,滤波作用要尽量小 SP_INT = 50% 取舞蹈轮电位计的中间位置值 LMN_HLM = 100.0 LMN_LLM = -100.0 LMN 系统稳定时,卷径计算合理,LMN的输出应该趋于0 点击此处查看附件 点击此处查看附件 管理员注:本帖已被纳入此次探讨发帖整理,请点此详阅。 |











 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城






