| 作者 | 主题 |
|---|---|
|
毅开 游士 经验值: 185 发帖数: 16 精华帖: 0 |
楼主
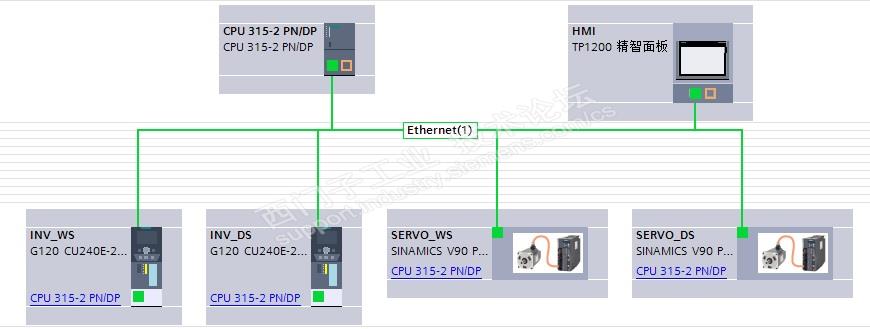
主题:博途V14实现S7-300系统控制G120和V90 系统描述:PLC S7-300通过PN网络控制二台G120变频驱动和二台V90伺服控制器,为组态V90伺服驱动,编程环境从STEP7切换到TIA博途V14。 1、硬件:PLC:CPU315-2PN/DP、变频:G120 CU240E-2 PN控制单元+PM240-2功率单元、伺服:V90伺服驱动+SIMOTICS伺服电机(绝对值编码器20位*20圈)、HMI:TP1200,利用西门子交换机XB008实现数据通讯; 硬件配置Weidmuller安全继电器控制急停功能、延时继电器达到断电延时断开变频和伺服的驱动使能电源(G120_DI0::配置849[0]、V90:STO +/STO 1/STO 2);控制单元接入DC_24V,保证主回路电源断开时网络通讯正常。
2、博途V14软件安装: 1)STEP 7 Professional V14 2)WinCC Professional V14 3)SINAMICS Startdrive V14 4)SIMATIC STEP 7 PLCSIM V14 5)SINAMICS-V-ASSISTANT和V90 usb driver。 3、变频G120:系统安装Startdrive完成,可离线配置G120的PROFINET设备名称、IP地址和通讯报文999(系统自动定义PLC端IO地址,可手动修改),从在线并诊断菜单将对应的G120变频配置好Profinet设备名和IP地址,可在线变频,通过调试向导逐步配置对应电机铭牌参数和静态、动态优化。最后编写程序将对应的PIW/PQW赋值到具体的MW或DB地址,方可实现监控。 4、伺服V90:按照上述在线并诊断菜单配置好Profinet设备名称和IP地址和通讯报文111,此处配置是在“Other field devices”下“Profinet IO”中找出V90的GSD文件,而不是“驱动和启动器目录”,配置好分别下载到PLC和V90驱动器内,PLC在线可看到对应设备; 打开V-ASSITANT软件,Mini_USB线连接到对应伺服驱动器完好、在线会显示连接驱动器,逐步配置: 1)控制模式:基本定位器控制(EPOS); 2)Jog:确认方向,可通过29000反转; 3)选择报文111,确认站名和IP地址; 4)机械机构、数据可默认,PLC程序内处理换算; 5)设置参数设定值:EPOS Jog设置点动时速度基准值; 6)配置斜坡功能:扩展斜坡发生器和圆弧段时间; 7)设置极限值:扭矩和速度作相应限幅; 8)配置回零参数:设置回零参考点,此处设置时最好结合机械实际位置推算对应的LU值,当然也可通过FB284(SINA_POS)设置回零位置功能软件实现,但操作之后需保存到ROM,否则断电后回到上次系统保存值。 9)P29150和P29151根据实际需求配置自定义通讯字; 10)一键自动优化,使能伺服后系统自动会作电机优化,配置完成,保存到ROM。 5、PLC程序:程序添加OB86(RACK_FLT)、OB87(COMM_FLT),避免网络通讯中断时PLC发生DOWN机; FB284(SINA_POS): 1)ModePos 1_相对定位、2_绝对定位、3_连续位置运行,在任意时刻可以在MDI运行模式内进行切换;而Execute在信号上升沿生效,读取ModePOS、Velocity和Position设置值; 2)Velocity(量纲1000UL/min,因伺服配置齿轮闭:1/1、机械行程:10000/圈),所以速度设定为60时,变频面板显示r=6;同时位置给定要结合执行机械给进量和齿轮比推算; 3)速度反馈对应量纲(ox4000,0000=P2000参考转速),可右移16位通过16384换算实际转速、进而推算机械给进速度; 4)RejTrvTsk:终止当前任务,对Jog无效;IntMStop:暂停。
|
|
liuxiaodan 侠圣 经验值: 3087 发帖数: 70 精华帖: 0 |
1楼
主题:回复:博途V14实现S7-300系统控制G120和V90 谢谢分享!收藏! |
|
明天一定会更好 侠客 经验值: 815 发帖数: 51 精华帖: 0 |
2楼
主题:回复:博途V14实现S7-300系统控制G120和V90
追求卓越
|










 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城














 短信登录
短信登录
