签到有奖
消息提醒
运维工程师专区
官方商城
扫码分享好友 任选多种周边
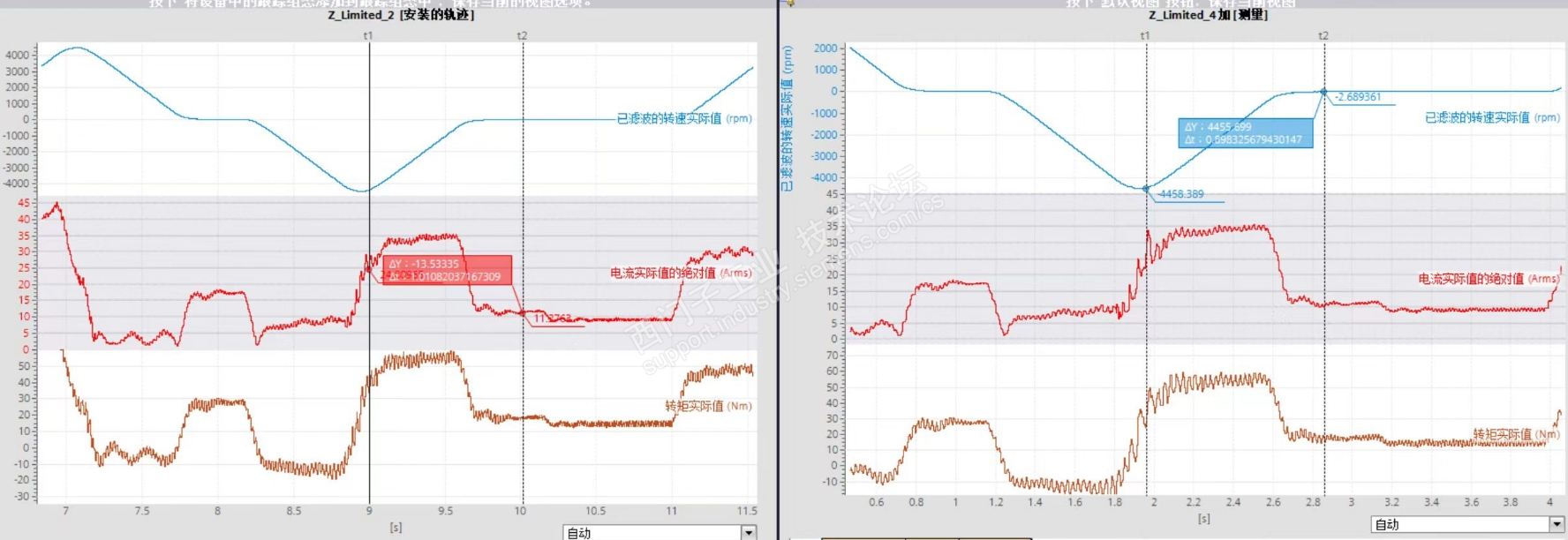
最近调试的一个设备,因为机械结构及速比的变化,原来的电机参数运行的时候,有时候会出现一个问题,电流在速度到达峰值开始减速的时候会有尖刺,伴随着电机异响,单纯从速度看,转速也是比较稳定的,但是电流的异常和声音的异常,尤其是后者的表现,需要找到原因并解决。
因行程较短,设备几乎无匀速段即开始减速,而且存在超频运行的情况,额定3000,最大速度时到4500,找技术支持,对方提出速度曲线并无异常,电机超频严重,带来了转矩衰减,建议让重新复核电机选型问题。但相近设备都是预采购了同型号电机,所以依然考虑从参数上看看是否有可以优化的余地。
我一开始考虑做让设定合适的转动惯量,并旋转测量,但一番操作下来反馈并无效果。
甚至,设定了惯量后,右侧曲线还不及左侧的。此办法没走通。
后来直接尝试调整了电流环增益P1715,发现有效果,经过几次小幅降低尝试,最终速度运行平稳基础上,实现了噪音的消除和电流曲线的平稳。
回头再看增量及电机识别的调试流程问题。还是有点不明白,想探讨一下正确的操作流程,以及这几个参数的关系,不知道是否有相关资料或者经验可以分享的。
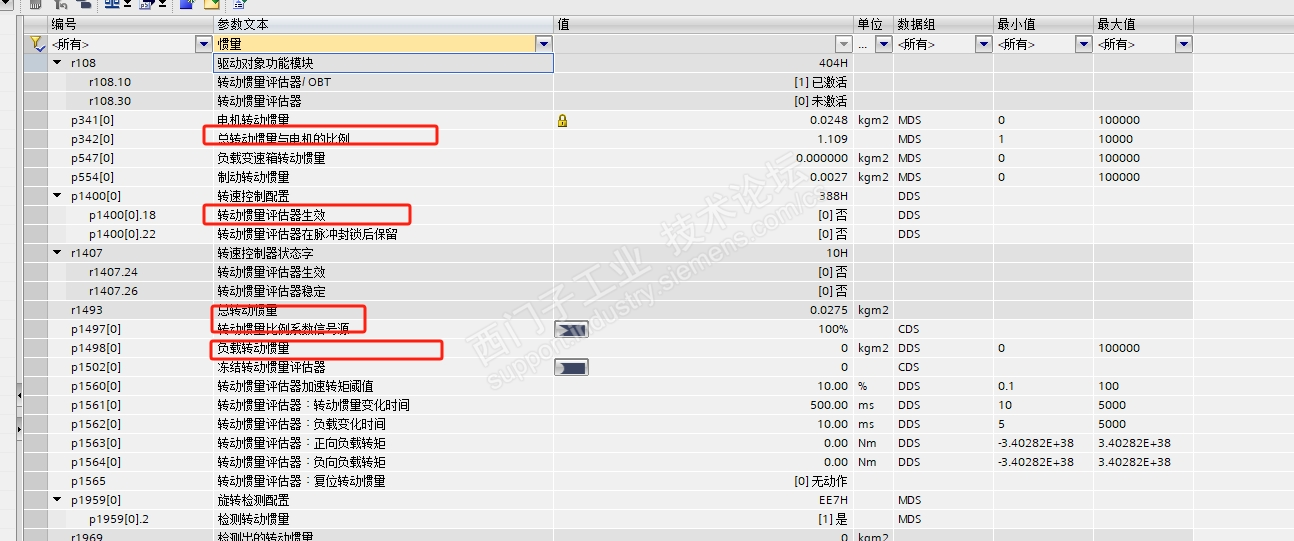
342惯量比和变速箱惯量、负责惯量等下面几个参数是什么关系呢?S120里面是做了细分,电机的、变速箱的,负载的 都需要明确?还有就是转动惯量评估器的作用也不是很明确。
以上是今天主要想了解的。
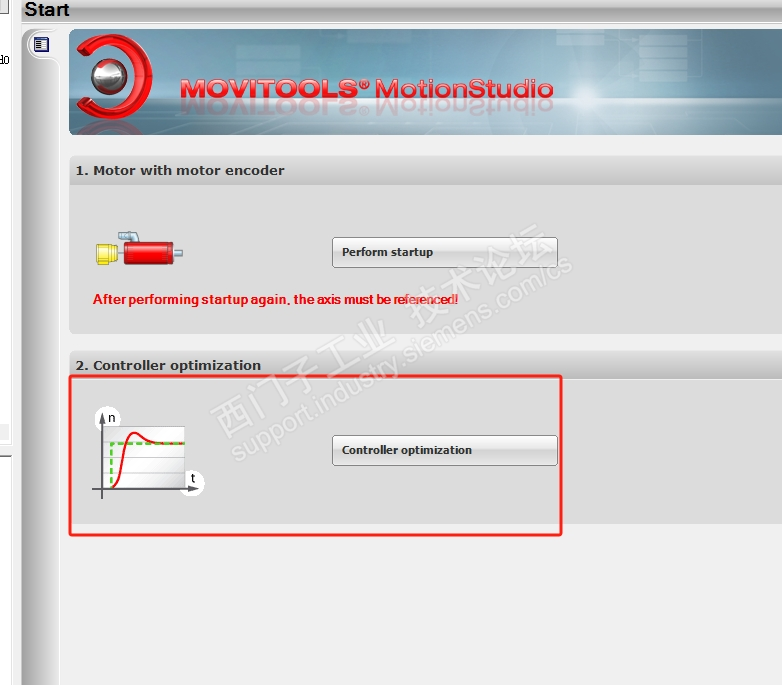
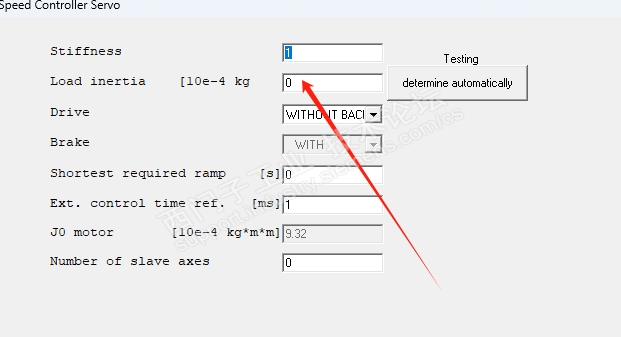
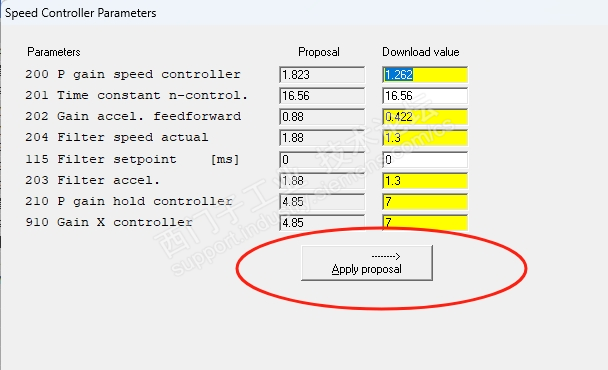
在这说一下sew的这块的处理办法,个人感觉更简单直接一些:
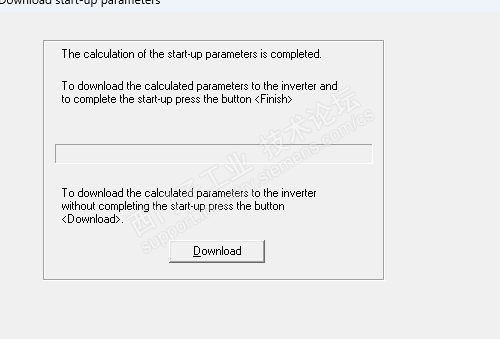
1打开转速控制器优化流程界面---2设定负载转动惯量---3进行计算输出----4然后用户选择是否使用推荐方案---5下载参数:
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
帖子链接:https://www.ad.siemens.com.cn/club/bbs/post.aspx?b_id=47&a_id=1883359
感谢调试经验分享
哦,你这里主要涉及到:动态优化的执行处理。
执行动态优化的目的,是得出你这个驱动系统的最快响应时间。
过程中,会在几个不同的目标速度下,做多次急加速、急减速的变速测试。找到:不超过(设定的)最大电流的最快加速。
但这是针对完全无间隙的传动系统的。例如:直接传动的无间隙滚珠丝杠传动。
而当实际传动系统是有传动间隙的齿轮传动;有弹性环节的皮带传动(非钢丝同步带。)那么这个变速测试结果,是不正确的。往往得到的响应时间较快。(时间常数较小。)
这样并不能反映真实的(折算到电机轴的)传动系统转动惯量。
因此参数342的比值是不正确的。
自然,它导致给定变速时,系统预控很快的加速跟随,而实际系统跟不上而输出更大的转矩电流。另一方面,为避免电流过载,控制器又抑制频率(速度降低)。导致转矩电流迅速降低。其中,间隙区间过渡是几乎没有负载的。周而复始。
这时,就需要手动调整。一方面实际计算系统惯量;另一方面,加大积分时间、减小增益;以此,降低一些PID的响应速度。
针对顶楼的描述和提供的电机运行状态转速、转矩、电流实际值波形图。谈一下我的看法。
首先,转速录波,除了实际值还应该用设定值在同一坐标系下作比较才能更好地分析问题。仅有实际值,没有设定值,看不出速度调节特性的优劣;
第二,惯性补偿作用,主要是针对速度调节特性的修正和改善,当速度实际值不能紧跟速度设定值时,通过修改惯性比和惯性补偿参数,会起到明显的效果。传动控制,主要目标是速度控制,而速度控制的核心就是惯性控制;
第三,如果速度实际值曲线是平滑的,而转矩和电流曲线是带尖峰或波动的,那是说明转矩和电流作为速调的内环,其跟随性不好。需要调整它的跟随性。何为跟随性?就是让转矩和电流跟随转速的变化而变化,不能自己冒尖,出风头。所以,顶楼的描述中有这样一段话:
“后来直接尝试调整了电流环增益P1715,发现有效果,经过几次小幅降低尝试,最终速度运行平稳基础上,实现了噪音的消除和电流曲线的平稳。”
这就是有的放矢的解决转矩和电流控制的跟随问题。也就是说降低转矩和电流调节的灵敏度。让其仅仅是跟着转速的变化而变化。转速不变,转矩和电流也不能变。
3楼精华帖,指出了顶楼问题所在,主要是机械传动结构存在问题,比如,齿轮箱间隙。从另一个角度分析来解决问题。殊途同归。
所以本楼的讨论,针对一个具体的实际问题,其实解决方法不是唯一的。这也正是传动控制系统的复杂性所在。我们遇到问题,先要看状态,然后根据传动结构的工作原理和反应的实际状态,做出相应的调整和处理。
录波是最好的检查手段。而一开始去调试系统惯性比和惯性补偿,方向是错的。因为惯性参数只能解决转速的设定值和实际值之差的问题,解决不了电流环的波动问题。
解决齿轮箱间隙在运行中的撞齿,这也是一个传动控制难题。需要在实践中自己摸索一套解决方法。know-how
本楼帖子,让我想起很久以前的一个往事。那时,我刚刚接手西门子的直流传动,通过装置的自学习和优化辨识调试传动参数。很新鲜。因为在此之前,自己做的传动控制系统都是模拟电路的,没有数字化的控制。参数全是靠自己手动调节,设置。而西家传动自己辨识和优化后的调速特性特别好。转速设定值与实际值跟随性,快速性,稳定性,带载能力等都很好。可是我看到电流环的参数有疑问,它的放大倍数和积分时间都非常的小。于是,我就问西门子一个资深工程师,为什么电流环的PI参数这么小?他告诉我,装置自己算的,而且这也符合传动控制双闭环结构的基本原理。因为作为电流环是内环,它必须要跟随外环的变化而变化,它自己不能主动。所以时间常数就得小,不能大。这个认知记忆深刻。因为他讲出了双闭环工作原理和特性。其实这个概念书本里就讲了。只是上学时,没被关注。
很棒的调试经验分享,谢谢!
呵呵,这是个失败的经验!
短行程何来的高转速?为什么要追求高转速?为什么只能是高转速?
并且,这种速度曲线,是我们应该极力避免出现的,尤其是高频往复运动的机构
况且,从电机优化的数据可以看出,负载很轻,惯量比就是1.1左右,你就不能提高点加速度吗?
知道位移,速度,加速度之间是个多解的关系式吗?你取的几乎是个加速度最小,速度最大的的边界值。
基本的运动学的公式计算都没有,力学计算呢?功率计算呢?
还拿SEW说事儿,那点参数与西门子的有多少区别呢?
总之,基础的东西没说清楚,上来直接就是内部三环的参数优化,我认为没有数清楚问题的实质,也没有太大的参考价值
6楼的精彩点评很有道理。仔细阅读顶楼问题描述。确实存在系统结构和控制参数设计需要改进的空间。
传动控制(运动控制)中行程,速度,动态变化之间,要有一个合理的计算和配合,参数调试优化。
任何一个电拖系统,电机的外机械特性曲线所包罗的面积,是电拖系统能够控制的范围和区间。我们所设计和选型的系统参数,必须让负载特性曲线在电机的外机械特性曲线所包围。尽量不要把负载特性曲线工作在外机械特性曲线的边缘。这才是一个设计合理的传动控制系统。
由此,设计一个传动系统,必须要有理论的支持和计算。让负载特性工作于我们所设计的范围以内,把负载的工作状态掌握在股掌之间。
引用0楼详细内容:
z版的点评还是那么犀利哈。
各行各业,设计选型和调试人员的水平等情况 参差不齐,有很多不够严谨和规范的。
所以,非常感谢提点和指教了。
目前看电流,当前的加速度,上升时,电流也处于过载状态的了,下降时 倒是还没有,当时的确没有考量到继续提高加速度的问题。
实际是参考了机械选型时设计的加速度,没有再往上提,不过,调试人员当时调试时,也的确没有关注 设定的速度在当前行程下是否能达到。
引用6楼详细内容:
如你所说,这样还是电流过载,那就真的应该重新考虑机械选型了。
因为这时候不仅仅是扭矩过载,而是功率过载,高频运行一段时间会导致电机过热及驱动器过热保护的。
这些通过计算都是可以预先得知的,没必要去浪费时间,曲线好看没有用
机械负载过载。
请问楼主做了静态整定和动态整定吗?严格说,做了整定应该效果很好的。
感谢分享,学习了!
感谢经验分享
实用经验,谢谢分享!
谢谢分享,非常实用。学习了
西家确实是把好多参数都交给调试人员,让他们自己去整,国产的就没那么多可调性
分享
扫码分享好友 任选多种好礼
收藏
有帮助
1. 文件大小:上传文件的大小请限制在2M以内。
2. 文件格式:请不要上传.exe文件,系统支持的格式有:.avi,.wmv,.mp3,.rar,.zip,.doc,.docx,.xls,.xlsx,.ppt,.pptx,.pdf,.wma,.asf,.txt,.7z
欢迎您访问支持中心!
丰富的视频,全方位的文档,大量的网友交流精华……
为了更好的完善这些内容,我们诚邀您在浏览结束后,花20秒左右的时间,完成一个用户在线调查!
感谢您的支持!
密码至少8位,包含大、小写字母,数字和符号至少三种。
允许邮箱和手机接收来自支持中心网站的信息
我已同意《支持中心网站注册协议和隐私政策》
微信登录扫码一键登录
验证码登录
密码登录
二维码失效点击重试
打开微信扫一扫,快速登录/注册
未注册手机验证后自动登录,注册即代表同意《支持中心网站注册协议和隐私政策》
三日内免验证登录
短信登录
登录











 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城


 分享帖
分享帖 故事帖
故事帖 技术探讨帖
技术探讨帖 求助帖
求助帖 西家杂谈
西家杂谈 投票帖
投票帖








 复制链接
复制链接













 短信登录
短信登录
