| 作者 | 主题 |
|---|---|
|
kdrjl 版主 
经验值:146705 发帖数:36780 精华帖:452 |
楼主
主题:G120使用花絮 1.用BOP-2激活自由功能块 采用STARTER来激活G120的自由功能块,这个都基本知道。一开始进行结构组态时,对项目选勾即可。但是如果不用STARTER调试,就是用BOP-2调试呢?怎么激活自由功能块呢? 方法如下: P10 = 11 P108.00_18 = 1 P10 = 0 存盘 非常简单的操作。
我是你的朋友
|
|
kdrjl 版主 经验值:146705 发帖数:36780 精华帖:452 |
10楼
 主题:回复:G120使用花絮
主题:回复:G120使用花絮接着叙 4.G120的用户文件应用 什么是用户文件?就是变频器除了快速调试要输入的电机铭牌数据以外,以及快速调试流程里规定的参数以外,用户根据自己的现场需求,自己定制编辑的工艺控制参数设置。或者叫用户自定义的过程布线参数设置。 对于把西门子传动作为自己产品的一部分嵌入其中的用户(系统集成商—OEM用户),这个用户文件的使用就太方便了。他可以成批量的复制和拷贝产品的参数设置,实现快速的调试和产品生产与制造。 在STARTER里,用户自定义的文件有三种模式,而且可以任意的调用和自动覆盖改写当前的参数设置,还可以另保存,也能把用户文件用PDF形式打印成用户的自定义参数表。 哇塞,今天我看到这些用户文件的使用功能,而且试了一下效果,兴奋极了。因为我以前是自己一个一个的编辑文档的参数表,在这里一个按键就自动生成了。 G120用户文件的功能,使变频器的参数设置也可以平台化使用了。很爽。开放,平台化技术,这是西门子传动的传家特色。我最喜欢的一个亮点。
我是你的朋友
|
|
传动小虾米 侠圣 经验值:2388 发帖数:99 精华帖:27 |
25楼
主题:回复:G120使用花絮针脚定义如下 2 RXD 3 TXD 4 PS 14V 5 GND
海纳百川,有容乃大
|
|
yming 版主 经验值:138911 发帖数:23251 精华帖:881 |
47楼
主题:回复:G120使用花絮那只能用自由功能块来搭一个。 我以前这么用过。条件还要引用那个启动准备好的完成脉冲。 还可以和OFF2/OFF3连锁,可以设成ON 停车是OFF2。
学而时习之,不亦说乎?温故而知新,不亦乐乎?
|
|
yming 版主 经验值:138911 发帖数:23251 精华帖:881 |
56楼
主题:回复:G120使用花絮我记得,以前我是用 那个固定常数 2900;加个比较器转成开关量去控制的。 反正搭好了自由功能块以后,试试逻辑(包括重启后状态),最后再去连接 840;844等等。
学而时习之,不亦说乎?温故而知新,不亦乐乎?
|
|
Zane 至圣 经验值:85948 发帖数:21211 精华帖:403 |
67楼
主题:回复:G120使用花絮K版又做了个很不好的示范,勾起别人的兴致,但又做不好,连个EMC都解决不了的用户怎么能解决这个通讯问题? 好多做检测设备的用户,都曾向我提出要做这个方案,都被我严厉拒绝,有不死心的自己去做,通讯好通,应用难用啊,涉及到方方面面的问题,给自己挖坑的节奏,结果惊人的一致,均以失败告终,任你是个高手,博士硕士扎堆。 用个PLC其实也没啥成本,而PC与PLC同驱动通讯的可靠性根本就不在一个数量级上,要么就用WINAC(大多数人是从内心就拒绝的),多少人是不撞南墙不回头啊。 STARTER软件,在控制面板调试时,只要一切换界面,系统就停机,为啥?问各位你们的控制软件有STARTER做得那么好吗?
Zane
注册自动化系统工程师
Always save before download
|
|
俱怀逸兴壮思飞 至圣 经验值:13134 发帖数:5007 精华帖:106 |
68楼
主题:回复:G120使用花絮看着真亲切啊!我刚参加工作时,我们部门的总工,就是老和我说“好记性不如烂笔头!” 不管系统大或是小,总是让我先画这种原理框图给他看,他才会点头~ |
|
传动小虾米 侠圣 经验值:2388 发帖数:99 精华帖:27 |
74楼
主题:回复:G120使用花絮看了Zane斑竹和k斑竹的留言,我也随便说两句
可见Zane版反对PC和装置直接通过OPC通讯的原因是我们软件的水平达不到STARTER或者WINAC那样。 换句话说,如果你们的软件有STARTER或者WINAC的水平就可以这么用。
而K版说的第三点中, "针对绝大多数的客户需求,也够用。" 那就是说K版目前对于PC和装置直接通过OPC通讯的软件水平符合用户的要求。
我个人觉得抛开客户需求谈方案是否可行都是片面的! 两位版主的客户对系统的要求显然不同,虽然K版的软件水平可能达不到STARTER或者WINAC那样,但是对于客户的需求能满足,这就OK了。当然如果满足不了,我想他也会选择增加PLC的。
这里对于K版的尝试精神还是值得点赞的。
海纳百川,有容乃大
|
|
Zane 至圣 经验值:85948 发帖数:21211 精华帖:403 |
75楼
主题:回复:G120使用花絮K侠正在做的事情我早就做过了,我也遇到过不少客户要这么做,我也帮助他们解决过一些问题,但最终我的结论是此类基于PC的通讯方案的可靠性差,实现难度大,后续维护烦,其实STARTER的软件功能都齐全了,但它也就只能做调试软件,而不能做实时控制软件。想多走一步有多难? K侠这个方案还在测试阶段,目前得到的信息是仅仅测试了OPC动态链接通过PN口对驱动的变量读写功能,测试的结果超出了K侠的预期,比USS串口通讯强太多了,但这就能证明这个方案一定是可靠的吗? “我个人觉得抛开客户需求谈方案是否可行都是片面的!”这句话看似正确,实则错误。因为不管客户什么需求,可能方案就那么一个,比如通过通讯手段控制变频,就是这么一个方案(PLC+现场总线+驱动);为了迎合客户省钱的需求,技术上的底线就可以不要了,用非实时通讯实现实时控制,行吗?谁能告诉我,K侠的设备不需要实时控制?电机到了10000转,通讯进程被挂起了怎么办,系统重启吗? 所以我说长征还没出瑞金,K侠介绍点好玩的,背后花了多少功夫他可没告诉你!
Zane
注册自动化系统工程师
Always save before download
|
|
yming 版主 经验值:138911 发帖数:23251 精华帖:881 |
76楼
主题:回复:G120使用花絮我觉得Kdrjl 大侠说的还不是同一件事儿。 K版的应用只不过是: 1、单传,只对一台驱动。 2、OPC 的主要功能是读取、保存驱动状态,而且不需要像PN IO 那样2-4mS 那么快,有100mS 的周期就满足了。启动驱动仅仅是工作开始的初始点。 3、可能还有其他部分的传感器需要连接到OPC 采集端口。而快速采集、保存功能,不是PLC的强项。PC机倒是可以。 4、整个闭环都在驱动内部搭建,OPC不用参与,只是给个启动命令。急停还可能就是硬线连接。 5、如果实际上需要多人大屏幕观察,还是PC 机的HDMI 接口到大电视上,效果来的好。 所以,从K 版之前说“不用PZD ”这个过程控制就可以知道,这个OPC 很可能只不过是连续、循环使用非周期读写驱动而已。实际应用,还是可以满足要求。 这种方案用于检测设备还是可以的。用于生产设备去控制多台驱动联动,显然不行。
学而时习之,不亦说乎?温故而知新,不亦乐乎?
|
|
传动小虾米 侠圣 经验值:2388 发帖数:99 精华帖:27 |
77楼
主题:回复:G120使用花絮看来Zane版是在这条不归路上走过一遭了,才会如此激动的劝我们这些后来人。
K版的系统我没见过,他花了多少功夫我确实不知道,也只能从他回帖中的信息了解一二。 K版的第三点说了,“假如采用S120系统,由DCC完成控制工艺,OPC与上位机连接操作系统。”
实时工艺控制是由DCC完成的,PC与装置之间只是交换一些控制信号。 (此处还请k版确认,如果不是以下文字可以忽略) 启停控制,发出给定值这些操作正式Starter调试软件的功能,并不需要多走一步。 这就和PC通过OPC与PLC通讯是一样的啊,而PLC需要完成实时控制的部分交给了DCC,同时一些保护功能也可由DCC完成,此时的PC更像是一个AOP
海纳百川,有容乃大
|
|
Zane 至圣 经验值:85948 发帖数:21211 精华帖:403 |
79楼
主题:回复:G120使用花絮关于OPC控制驱动的问题,看似传动方案的问题,实则是对控制系统认知的问题。 PLC为什么可靠?循环扫描,超时出错,是个实时的控制系统。 现场总线为什么可靠?因为也是个实时的通讯,并且与PLC扫描周期是同步的。 那么PLC+现场总线+驱动,就是PLC通过实时通讯方式对驱动进行实时控制,这样的控制系统才是可靠的。 我们平时接触到的各类控制包括传动控制,应该都是属于实时控制的范畴,没有什么要求高低的,更没有客户需求的,如果客户知道你系统的通讯指令存在很大的可能性是到不了驱动器的,他是绝对不会采用你的系统的,问题是绝大部分的客户根本不明白,你也未必想向你的客户说明白,不是吗? 说白了,一个控制系统,简单也好复杂也好,实时控制是个底线,这个实时包括了程序的实时扫描和实时的数据通讯,这就是我不同意K侠方案的根本原因,并非标准的高低,而是我认为只有一个标准。 举个简单的例子对比: PLC+现场总线+驱动 当PLC将驱动启动后,总线出问题导致通讯中断,因为实时通讯的中断,驱动会自动的停机报错,PLC也会报错,而这一些都是系统内置的集成功能,不需要任何的用户程序。通讯有优先级,与扫描周期同步。 PC+OPC+驱动 当PC通过OPC将驱动启动后,OPC通讯动态链接被WINDOWS挂起,这时通讯中断,但此时无论是驱动也好,PC也好,都无法知道通讯已经中断了,谁都在傻傻地等待。通过用户程序解决问题吗?在驱动上要通过自由功能块或DCC来解决这个问题,并不简单,况且还是废止了原来系统集成的好用又及时的功能。而在PC端,就算知道通讯被挂起,怎么能把通讯恢复呢,重启应用还重启系统?内存释放了吗?溢出和泄漏怎么办?通讯没有优先级,非循环通讯。
Zane
注册自动化系统工程师
Always save before download
|
|
yming 版主 经验值:138911 发帖数:23251 精华帖:881 |
81楼
主题:回复:G120使用花絮不说成本,只讨论技术应用。 我觉得K版的应用是一种特殊行业的应用。从“设置参数,置位840。” 就可以知道,他就要即便通讯中断,驱动仍然运行。(840被始终置位。当出现问题、急停时,硬线OFF2停车;即便OFF2复位,驱动也不会再启动。) 而通讯中断,正是在PC切换窗口、改变进程时,很可能发生进程挂起;中断的。不过切换回来,应该是可以继续读取驱动数据的。 他的应用肯定不是实时系统。从“不使用PZD” 就可以知道,连数据的一致性都不需要。有点像用WEB通过PLC读取驱动状态,只不过速度稍快一些而已。 这很像网络游戏,数据交换能达到200-300毫秒,用户体验就基本满意了。 (这方面也不能和国外比,人家都是几十毫秒,我只要和国外联机游戏,总是被秒杀。要不然就是影响游戏速度,让人家踢出来。呵呵)
学而时习之,不亦说乎?温故而知新,不亦乐乎?
|
|
kdrjl 版主 经验值:146705 发帖数:36780 精华帖:452 |
87楼
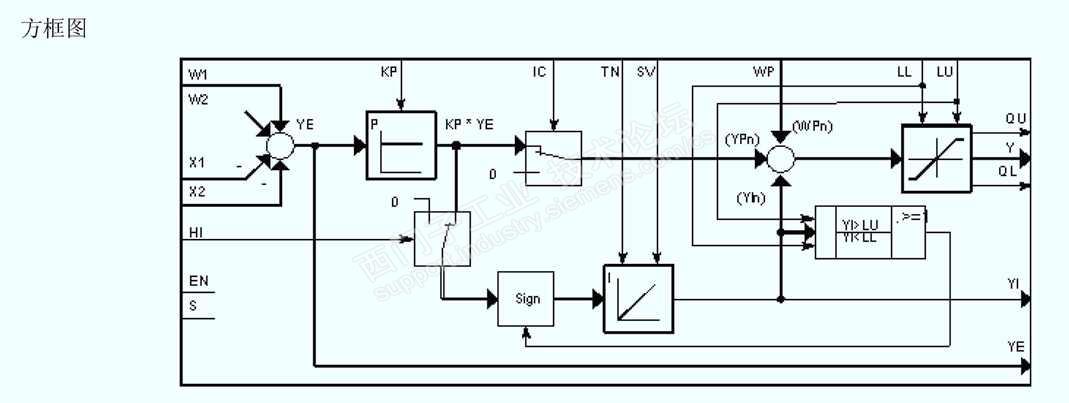
主题:回复:G120使用花絮10月1日放假之前,我曾经向400技术热线求助过一个问题支持。内容是: 当G120控制的电机运行在稳态时,需要速度调节的参数尽量的软一些,以抑制负载的转矩波动,而当电机在启动状态的动态加速过程需要调节器的参数尽量的硬一些,以保证动态加速的快速平滑性和连续性。这需要用到G120的速度调节器自适应功能。可变的速度调节器参数自适应调整。G120的功能图告诉我,它有这本事。 首先,这个功能在G120里是4级授权的参数设置,比较麻烦,其次,我做的参数设置没能达到目的,不知哪里没做对。求助技术支持给予帮助和纠正。技术热线工程师给我发了一个推荐的文档,并明确告诉我,G120这个功能是可以实现我所需求的,没有任何问题,让我好好看看这篇文档,如果有问题再问。此问题通过阅读推荐的文档,很好地解决了问题。与此同时让我无意发现了G120自带的一个功能,一直被隐含的,发布的功能图里也没反映,是这个推荐文档里表明的。 这个功能就是当SLVC方式,如果需要弱磁控制调速,G120内部自动激活SLVC下弱磁控制区间的自适应参数调节。难怪呢,我用G120控制第三方电机,从50Hz到200Hz的调速,既连续又平滑,没任何压力。一直以为是自己调试参数做的到位,没想到,是G120暗中帮忙呢。 这个速调弱磁自适应功能,它的原理就是,当电机转速进入弱磁以后,速调的放大倍数在现基础上自定降低,积分时间自动延长。以保证弱磁下调速的不敏感性,防止转速出现抖动。直至到最高转速为止。这么做很地道,很专业。因为是自动激活的,所以控制系统做了无名英雄,把荣誉让给了调试者。外人看了以为是调试人员牛呢。哈哈 功能图如下:
图中篮框内容既是。 文档的信息:条目ID:109482275,文档发布日期:2016年1月25日。有兴趣者可以去浏览阅读。G120速度调节器自适应应用推荐文档。
我是你的朋友
|
|
kdrjl 版主 经验值:146705 发帖数:36780 精华帖:452 |
88楼
主题:回复:G120使用花絮最近总是接触G120或S120的调试。所以有关控制方面的话题满脑子都是。今天聊一聊S120的DCC块PIC(PI调节器)。先只限于纸上谈兵吧。 DCC里的PIC块功能图和真值表如下:
过去,一说PID算法,哇塞,神秘了,特深奥的那种。什么调节器的设计方法和计算,什么对称法,什么最佳计算0.5,云云...。现在,看过DCC的PIC块所给出的功能图和真值表。那些算法,全都黯然逊色了。 由这个块可以实现先开环后闭环的控制方法,通吃一切闭环调节对象。没压力。根本不用算。嘻嘻。话说的有点绝了,但实际似乎就是这的吧? 先开环后闭环的控制基本工作原理是:当PI调节器输入设定值和实际值做比较,如果其差值的绝对值大于100%设定值的10%,让调节器的输出等于当前设定值;等待实际值的上升,使输入比较的差值绝对值小于100%设定值的10%,一旦条件成立,PI调节器的输出接入PI运算结果。 也就是说,以100%设定值的10%作为标准,当设定值与实际值之差大于此阈值,开环给定设定值,当设定值与实际值小于此阈值,启动PI调节器运算消除静差。 具体的做法,需要有一个比较器做辅助支持,然后利用PIC块的端口设置即可实现。真值表给出了各个端口的基本功能。
我是你的朋友
|
|
伊默 至圣 经验值:19354 发帖数:4271 精华帖:118 |
92楼
主题:回复:G120使用花絮这就有意思了! 原来我自己做的PID就是实现了它这个功能呢?嘿嘿。 我们的设备都有卷取控制,用Dancer来做。 当卷取直径从最小的100mm逐渐增加时,我会按照当前卷径来递减P,递加I... 比如我设定的初始比例系数为 K, 初始积分时间为 I..... 当卷径从100增加到500时,比例系数变为0.2K, 积分时间变为5I ... .... 另外, 我会在加减速和匀速分别设置两段PID参数, 加速速段的比例系数大,积分时间小,有利于快速响应。。。。。 匀速段的比例系数小,积分时间大,有利于抖动小... ...
I can do it
|
|
kdrjl 版主 经验值:146705 发帖数:36780 精华帖:452 |
94楼
主题:回复:G120使用花絮话说编码器信号问题导致的G120报故障 有关这个话题,我想在坛子里有过不少的热议了,我记得曾经为此有过专题讨论,有说编码器信号电缆屏蔽层单端接地的,有说双端接地的,云云。 周五我刚好收到了自己兑换的奖品——《接地指南》,自己翻看了一下,周六就赶上单位加班调试传动系统了。呵呵,这是机会呀。按照指南里的原则,我围着已经接好的系统转了一圈,立马发现几个等电位和接地的位置没有做,现场指导,按指南要求等电位,接地到位。 快速调试一开始,只要到了动态辨识(此时电机是要通电转动的),系统就报错终止辨识,而且都是编码器信号没有。用示波器查看编码器脉冲信号没问题呀,编码器的脉冲数也是相符的。但看到编码器的信号电缆在电气柜侧没有做环形压接柜体金属外壳。处理后继续辨识,还是报错,故障内容依旧,编码器无信号。再到现场查看,又发现编码器的信号电缆在电机侧没有环形接外壳,我靠,我有点不耐烦了,怎么都没按要求接屏蔽层呢?为了快速解决,急于看结果,我告诉身边的同事,赶快把屏蔽层与主机外壳接上。不管什么环形不环形的了,猪尾巴接法也行!在此处理后,动态辨识顺利通过。大家不约而同的起哄庆祝。真不容易呀。 结论,编码器信号电缆,我们采用的是德国缆普公司专用产品,为此,就是为了让编码器信号可靠,但双端接地(接金属外壳),这是不可或缺的可靠性条件。
我是你的朋友
|
|
kdrjl 版主 经验值:146705 发帖数:36780 精华帖:452 |
97楼
主题:回复:G120使用花絮关于G120的CU250S-2,模拟量输出端子设置。 自从使用SINAMICS产品以后,很长一段时间,全都是网络通讯控制,模拟量的输入和输出端子很少使用,也不太关注。最近,一套系统,使用CU250S-2控制器,有两个电机运行参数需要通过模拟量输出去外部,提供给第三方设备信号使用。要求是0-10V电压信号。 调试时,通过STARTER查看参数r772(模拟量输出选择参数实际值百分比)和r774(输出电压实际值V)。换算都是对的。但用万用表测量端子电压,要么是0,要么是11V多。很是诧异。因为我理解,模拟量输出设置系统默认的0-10V电压输出。所以参数P776 = 0没有动。一直到下班,也没搞明白。以为是CU有问题了。BUG。嘻嘻。 晚上回家怎么也放不下。在想内部监控都是对的,怎么到了输出端子口,就不对了呢?这是新的CU。当去查参数表手册P776的说明,我目瞪口呆。 P776 = 0: 0-10mA电流输出; P776 = 1: 0-10V电压输出; P776 = 2:4-20mA电流输出。 靠,想当然是不行的。凡事都要确认。确认!耶! 第二天上班,把P776参数由0改为1。一切皆正常。此时同事们一看昨天的问题解决了,问怎么回事?我不说自己的问题,就告诉他们,有一个参数既可以是0也可以是1.如果等于0,就在端子上并一个电阻。如果等于1可以不并电阻。昨天我们在端子上少接了一个电阻,导致的不行了。现在为了省事,不并联电阻了。改一下参数即可。然后偷笑。。。。。
我是你的朋友
|











 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 自动化标准机型应用中心
自动化标准机型应用中心 官方商城
官方商城