| 作者 | 主题 |
|---|---|
|
rafal 游士 经验值:281 发帖数:11 精华帖:2 |
楼主
主题:G120变频器-吊具提升使用,出现溜车事故 
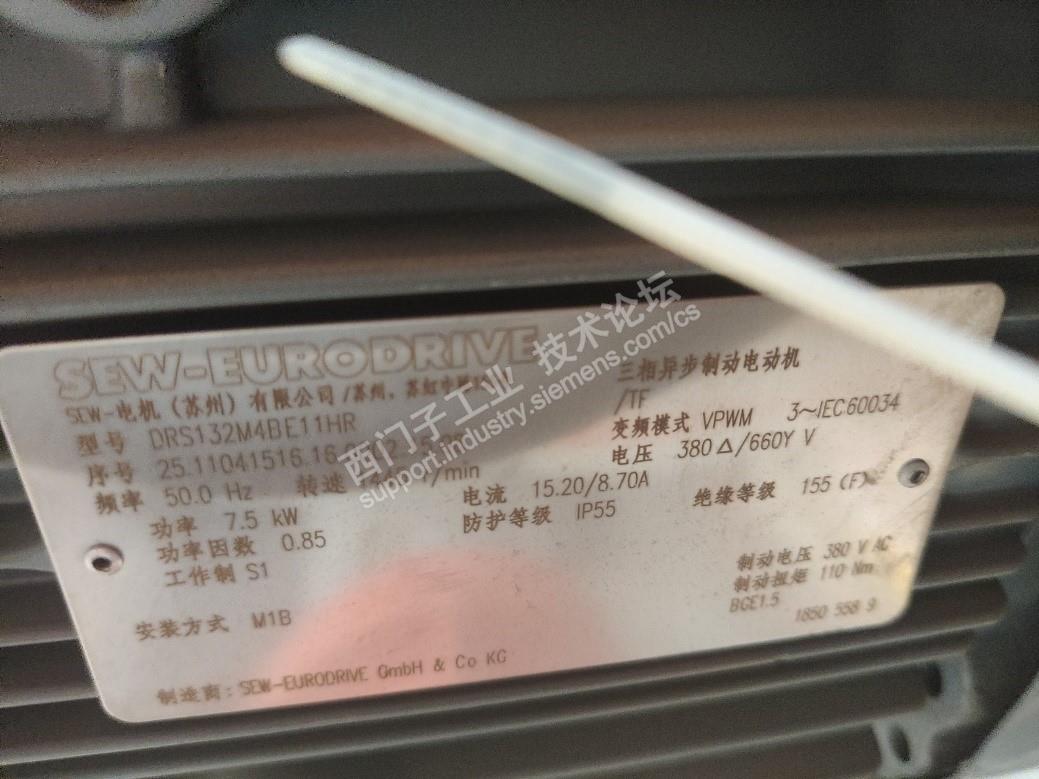
背景介绍: 1、吊具控制模型:S7-317F通过滑触线触点控制Smart200 PLC,200PLC通过BICO的方式控制一台22KW的G120变频器,变频器采用一拖二的方式控制两台SEW(7.5kW/台)电机,电机通过皮带提升吊具,设计的负荷能力为3吨(有待确定) 2、相关参数: 电机:功率7.5kW,转速1445r/min,功率因素0.85,制动扭矩110Nm 减速机:速比50 变频器:控制单元CU240E-2PN,PM240 22kW 抱闸控制方式:变频器抱闸控制和PLC抱闸控制触点串联在控制回路中 事故回顾: 1、吊具在离地20cm,工人完成现场装配后,操作人员按下“放车”按钮后,吊具上升到30cm的高度, 在准备往下一工位前进时,吊具溜车下坠至地面; 分析过程: 1、当时事故发生时,检查了电机抱闸间隙为0.6mm(符合SEW厂家要求),分析了PLC控制和变频器抱闸动作的时序图符合抱闸打开时间,同时 分析了变频器中设置的参数未发现明显问题; 因现场操作人员需要进入到吊具下方进行装配作业,现已增加安装凳子,放置在吊具吊腿下方,以防止吊具意外下坠;同时联络过设备厂家,一直未能查出问题根源,现求助于论坛中的各位同仁。 附件中我上传了变频器的参数、电机控制模型、电机负载能力的计算图。
|
|
风起云 至圣 经验值:16781 发帖数:712 精华帖:120 |
1楼
主题:回复:G120变频器-吊具提升使用,出现溜车事故参数方面: 1,提升设备建议使用矢量控制,而且是带编码器的矢量控制。现场没有编码器至少要使用无编码器矢量控制。不宜使用V/F;控制单元使用CU250S-2; 2,电机参数应按电机铭牌实际参数填写,尤其要注意星/三角别填错了;在这里应设P306=2; 3,参数中未看到P219,如有制动电阻务必填写此参数; 硬件部分: 1,故障中有多次F30003,要关注一下供电电压是否正常; 2,故障记录中有F7800和F30074,要留意控制单元和功率单元接触是否良好,如继续频繁出现这两个故障,要考虑一下功率单元是否有问题,比如更换一个试试; 3,抱闸控制端子应使用DO2; 4,DO所接接触器务必加上浪涌抑制器,使DO两端电压不超过30VDC; 5,抱闸使用变频器控制即可,不必串联到PLC; 其他: 楼主提问很用心,写的比较详细了。建议增加电机铭牌照片和事故时变频器状态信息,比如当时有无故障/报警,代码是多少;参数表毕竟不够详细,建议用starter保存参数上传; 另外,事故中“下一工位”是上升还是下降?皮带是否可能打滑?
驱动技术交流 Email: sf82@sina.cn
|
|
rafal 游士 经验值:281 发帖数:11 精华帖:2 |
3楼
主题:回复:G120变频器-吊具提升使用,出现溜车事故谢谢你的解答,有些信息在帖子里没有表述完整; 针对您的解答,我逐条回复下 参数方面: 1、后面有设备改造机会计划是要改成带编码的矢量控制,在提升场景使用V/F模式是个安全隐患; 而且我在接手这个工作的时候,发现PLC程序对提升距离用了简单的计时来实现,针对“冒顶”也只是使用了阻挡限位开关。 2、电机参数中电机数量与实际有误,现在是将两台电机当作一台2倍功率的电机来使用了,这种设置方式会造成什么影响; 3、P219参数我在TIA中上传的参数中也没看到,下午我去现场查下; 硬件部分: 1、故障记录中的信息,一直未重视,这里我会重点关注下; 2、故障记录中的信息,一直未重视,这里我会重点关注下; 3、目前抱闸控制P732参数为:r52.12 CO/BO: 状态字 1: 电机抱闸打开,应该就是您说的DO2; 4、变频器的抱闸接触器使用的是施耐德的RXM2AB2P7,交流接触器,在变频器控制模块的24端子(NO)接入火线,25端子(Com)接入接触器的线圈, 图纸中未标注使用浪涌抑制器,这个我会去现场再确认下,不能浪涌抑制器会造成什么后果; 5、串联PLC这点,我猜测是供应商当初在设计时,考虑使用V/F方式有安全和性能的不足问题, 在PLC中对抱闸释放加了延时,保证电机扭矩的建立,这个做法是不大合理,后期改造考虑此处要修改; 电机参数如下图:
事故时变频器状态信息都没有第一时间拿到手,也导致了后续查问题比较棘手,而且操作人员描述的事故情况也是跟实际有出入; “下一个工位”是吊具将负载提升到位后,吊具开始前进到下一个工位,前进控制是使用了另外一套变频器; 针对皮带打滑的问题是有可能,我们现场的吊具是通过317F控制滑触线,滑触线再控制吊具本体的PLC; 在上述工位发生的溜车事故,总共是发生了两次,一次就是上面描述的,另外一次是在操作人员没有任何操作的情况下,吊具自己缓慢下落(排除程序问题) 在第二次事故时,我们将问题的重点转移到“滑触线”上,分析了控制电路,如果滑触线碳粉污染是有发生的“第二次事故”的可能性; 两次事故都发生在同一段滑触线上,而且是不同的吊具,怀疑是滑触线的问题,所以我们当时第一时间将此处的滑触线进行了更换 |
|
Zane 至圣 经验值:85950 发帖数:21212 精华帖:403 |
7楼
主题:回复:G120变频器-吊具提升使用,出现溜车事故看了楼主的描述,我觉得系统的方案是最要命的,这是不作不死。 位能性负载,没有闭环控制,要命的是还双电机V/F开环一拖二,有啥分配负荷的措施,应该是没有的。 很容易,全部负载就会转移到一个电机上,另一个电机根本就不出力,而且变频器还不知道
Zane
注册自动化系统工程师
Always save before download
|
|
yming 版主 经验值:138911 发帖数:23251 精华帖:881 |
8楼
主题:回复:G120变频器-吊具提升使用,出现溜车事故我感觉搂主设计计算得太满了。 提升机构,要是我设计,安全系数至少2.5倍。
学而时习之,不亦说乎?温故而知新,不亦乐乎?
|
|
Zane 至圣 经验值:85950 发帖数:21212 精华帖:403 |
12楼
主题:回复:G120变频器-吊具提升使用,出现溜车事故此类应用的标准配置: S120 CPU320-2PN, SLM整流单元, DC-AC电机模块, 共轴电机一台带编码器VC闭环速度控制做主轴, 另一台电机SLVC力矩控制做从轴, 两台电机抱闸联动,需要断直流侧 两台G120主从同步方案(双闭环,或一闭环一开环),通过通信来实现的,响应有时间差,而且楼主用的控制器是S7-1200,就更不建议了。 开环不能做吗?可以试试,总载荷不超过单台电机的二分之一,确保载荷全部转移到一台电机上,电机出力仍旧能拽住负载,这样基本确保安全。但,两台电机的电流差值会很大,一拖二会有何影响?
Zane
注册自动化系统工程师
Always save before download
|











 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 自动化标准机型应用中心
自动化标准机型应用中心 官方商城
官方商城