| 作者 | 主题 |
|---|---|
|
kdrjl 版主 
经验值:146705 发帖数:36780 精华帖:452 |
楼主
主题:再谈G120速度调节器参数的整定 
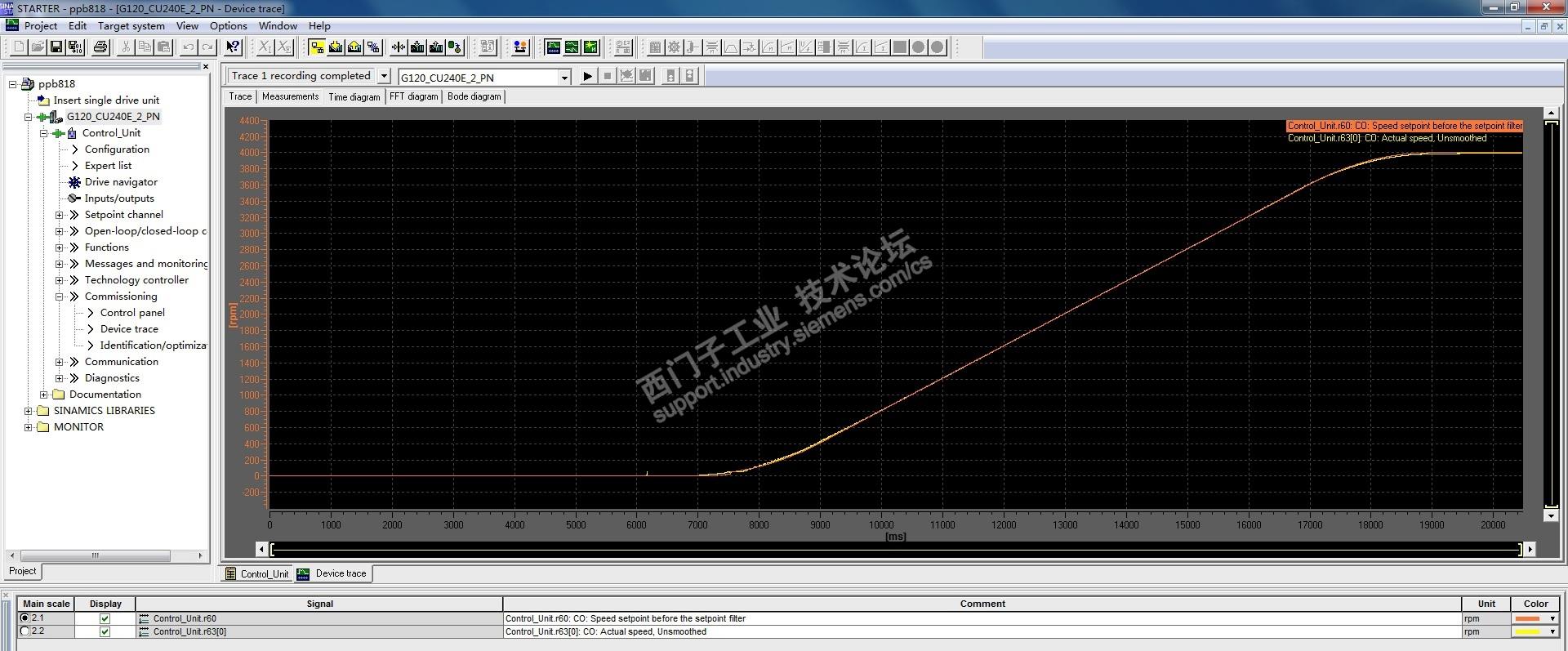
今天正好有一台G120的系统调试。于是,针对一个具体的系统,又操作了一次快速调试。该电机采用无编码器的矢量控制,请看调试以后,速度设定值和速度实际值录波的结果。
以前,调试以后的效果都是通过运行电机听、看、感觉获取信息。这次,用STARTER的trace看实际动态和稳态效果。一目了然了。
我是你的朋友
|
|
kdrjl 版主 经验值:146705 发帖数:36780 精华帖:452 |
1楼
主题:回复:再谈G120速度调节器参数的整定参数r345,P1470,P1472,P1496,都做了相应的改变。用自动优化辨识的结果是否行?因为不符合我的使用需求,,所以要调整一下。 比如,启动时间优化的结果是0.4s,我这利用不到这么快,所以改成了2s左右,同理,相应改变了积分时间和前馈预控,并适当降低了放大倍数。加大惯性时间的目的是想把动态变化的平缓。减小负载变化冲击。 该系统额定转速是2930rpm,最高转速4000rpm。有恒功率调速的范围。 我发现,动态特性自动优化的结果,往往是该系统的极限参数。而实际运行时,没必要采用极限参数。所以,必要的手动调整实属需要。不可或缺。调试的效果,最终还是用曲线说了算。
我是你的朋友
|
|
kdrjl 版主 经验值:146705 发帖数:36780 精华帖:452 |
3楼
主题:回复:再谈G120速度调节器参数的整定不是什么高手,驱动的控制方法,随时间或阶段的不同,总是有一定变化。包括自己在实践中不断的认识和改变,所以每个时期,总是会产生使用心得体会的。 问题的关键就是,驱动-它是一个活的东西,决不能一成不变,决不能照搬照抄,要具体问题具体对待。原理和计算公式都是死的,但现场的环境和条件,以及负载时间常数的特性,决定传动控制的个性化设计。这是重要的。 有些网友和同行,过分相信和依赖自动优化辨识的结果。对于静态计算和辨识的结果,相信和依赖无可厚非。而对于动态的辨识和自动计算,如果你相信或依赖它,那就是僵化了。因为我们动态辨识计算的场合,往往是空载测试,不是带着真实的负载做。所以。不要迷信它的计算结果哟。
我是你的朋友
|
|
kdrjl 版主 经验值:146705 发帖数:36780 精华帖:452 |
5楼
主题:回复:再谈G120速度调节器参数的整定G120因为其产品的定位决定,它的动态指标不会很高,所以,调试要把功夫下在追求它的稳态指标上,控制的稳态精度指标。做的好即可彰显G120的亮点。
我是你的朋友
|
|
kdrjl 版主 经验值:146705 发帖数:36780 精华帖:452 |
11楼
主题:回复:再谈G120速度调节器参数的整定又看了一遍本楼的信息发布,感觉自己还是没有说明白问题。结果是没错的。但问题却没说明白。什么问题呢?就是为什么自己做的动态自动辨识和计算结果不能用?非要人为地去修改动态参数,P342,r345,P1496,P1470,P1472呢? 现在想明白了。几乎自己所有的动态优化和辨识结果,都是在电机输出轴空轴状态做的。在没有负载的自动优化和辨识状态,其结果自然仅仅是电机轴的动态数据了。和真实的负载没有毛关系。 那么如果是带着真正的负载轴做动态自动优化和辨识,其结果自然是真实负载轴的动态数据了。比如说,我们的汽车底盘测功机,它的滚筒直径是48英寸,基础惯量的当量质量在1500kg-2000kg,甚至更大。那么它所做动态优化辨识的结果可以直接使用的,无需再人为去修改。而且西家传动所做的计算结果,和我们用传感器实测的数据,以及设计上的理论计算值都能对的上。 由此,电机空轴做动态辨识与优化,结果需要人为修改,使其满足真实的负载时间常数,才是可用的。这是我当前的认识,以前并没注意到。 其实这些动态辨识与计算的人为干预方法,在应用手册里都是有讲的。只不过没有关注罢了。一旦遇到问题,看看应用手册,很有帮助的。就是那本书,叫什么应用指南的书。
我是你的朋友
|
|
BULEY 游侠 经验值:596 发帖数:31 精华帖:0 |
13楼
主题:回复:再谈G120速度调节器参数的整定遇到一些无法带负载优化的,也只能自己改了 |
|
kdrjl 版主 经验值:146705 发帖数:36780 精华帖:452 |
14楼
主题:回复:再谈G120速度调节器参数的整定所以,自己想明白以后,就不在纠结动态优化做还是不做了。只有带上真实负载轴做的动态优化结果才可用。否则,还是要人为去设置它的最佳参数。
我是你的朋友
|
|
锋言锋语 至圣 经验值:26885 发帖数:3975 精华帖:54 |
15楼
主题:回复:再谈G120速度调节器参数的整定哪本书啊?
不忘初心
|
|
锋言锋语 至圣 经验值:26885 发帖数:3975 精华帖:54 |
16楼
主题:回复:再谈G120速度调节器参数的整定这个? G120变频控制系统实用手册
不忘初心
|
|
T信念T 侠客 经验值:668 发帖数:52 精华帖:1 |
17楼
主题:回复:再谈G120速度调节器参数的整定确实如此!!有时因为现场条件无法带载做动态识别,比如说平行小车,前后俩端有极限位,带载辨识固然好但有毁坏设备风险。这种情况下小车行进后退中因转动惯量大就需要手动调整响应。一切还要以现场实际情况为准。对于这个P1496的调整我倒是没有理解明白。 |
|
Haohaobb 至圣 经验值:16007 发帖数:1637 精华帖:39 |
18楼
主题:回复:再谈G120速度调节器参数的整定我记得我以前也提到过做动态优化感效果不明显的问题,就是因为有些设备本身或者工况是不允许让其做自由的动态优化的,所以在15/16年刚接触g120的时候,当时k版也有过尝试解答释疑,那段时间一直纳闷与纠结,动态优化的必要性和实用性。 目前也基本就是只做静态优化,然后靠手动调节1460/1470等参数。 除非g120能像s120 或者v90伺服驱动器,通过先限制好动态优化的旋转角度,然后进行辨识,依然是目前这种完全随意的动态设别,依然是很多设备无法识别的,非要脱离了真实的负载去做设备,又没有实际的效果。所以只能手动调整了。 http://www.ad.siemens.com.cn/club/bbs/post.aspx?a_id=1324466&b_id=47&s_id=110&num=50#anch
天道酬勤
|
|
kdrjl 版主 经验值:146705 发帖数:36780 精华帖:452 |
19楼
主题:回复:再谈G120速度调节器参数的整定兑奖区里曾经有过的兑奖资料。带光盘的那本书。G120和S120各一册的那个。应用指南。
我是你的朋友
|
|
kdrjl 版主 经验值:146705 发帖数:36780 精华帖:452 |
21楼
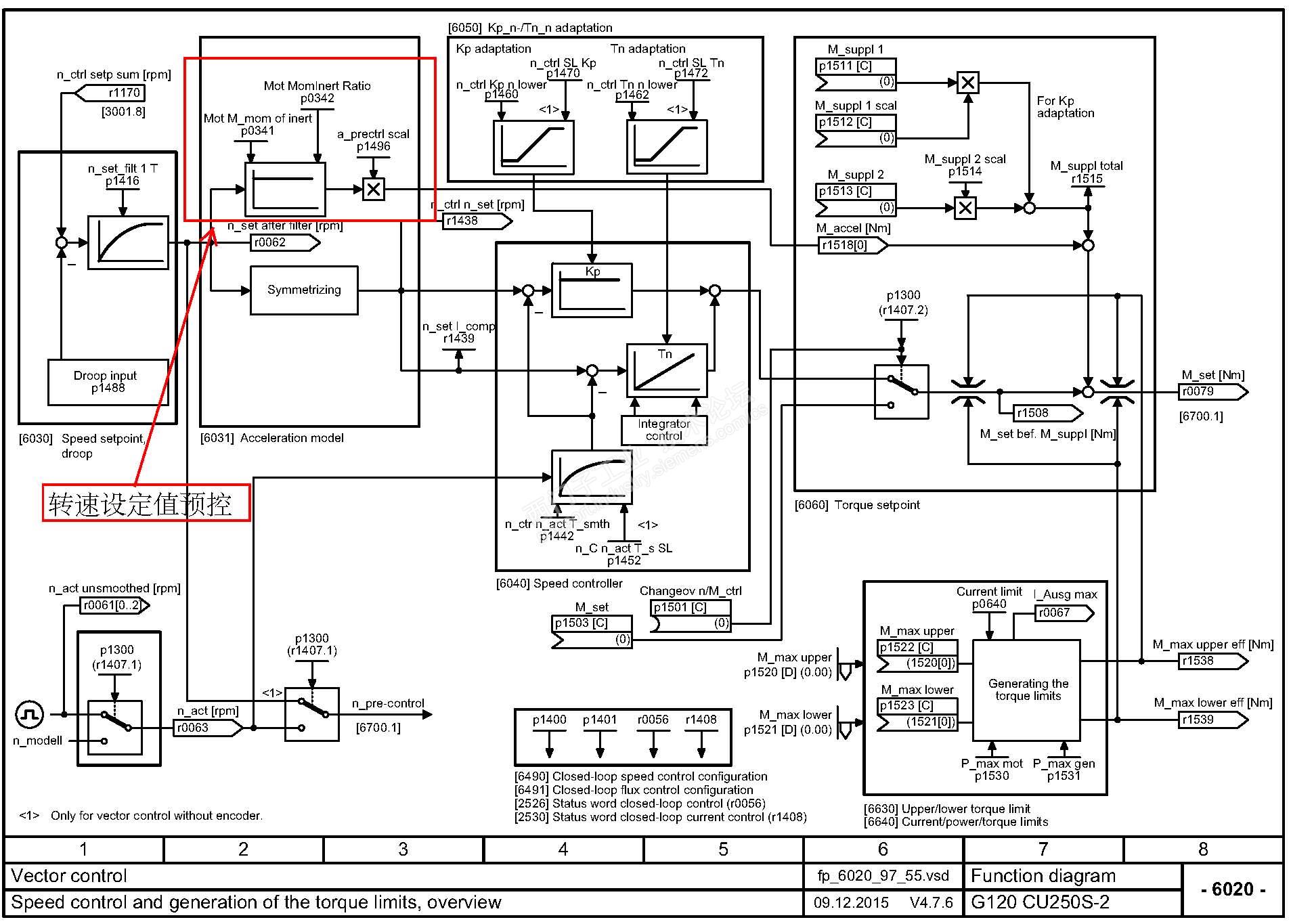
主题:回复:再谈G120速度调节器参数的整定P1496是速度设定值的预控,在功能图上,可以看到它的基本作用,就是当设定值发生变化时,P1496的输出是一个微分信号,提前加在速度调节器的输出了。不过,我最近观察,如果P1496 = 0的话,不管你如何设置速度调节器的PI参数,都会在阶跃设定值下,出现超调。想不让它超调,就得让P1496不等于0。一个很有意思的现象。所以,恒转速控制模式的传动系统,P1496要有设置,不要为0。当然,如果你没有设置一个符合实际的惯性比参数(P342),那么也会影响P1496的输出效果。 关于这个预控使用和调整,还是希望自己能多动手实践,去体会它的妙用。
我是你的朋友
|
|
kdrjl 版主 经验值:146705 发帖数:36780 精华帖:452 |
22楼
主题:回复:再谈G120速度调节器参数的整定我想再说明一下,如果不做真实负载的动态辨识与优化。并不是简单地去用经验值设置速调PI。速调的PI参数,是有自己的规律和取值范围的。通常情况(我是说通常情况)它应该符合最佳对称法的计算。所以,PI参数要依据系统惯性为准。那么系统惯性因为没有实测,所以是不知道的。那么我们可以根据现场的情况对其进行估算。 怎么估算呢?对好事者,留一个伏笔。大家思考。然后踊跃讨论如何?(捂脸)(偷笑)
我是你的朋友
|
|
yming 版主 经验值:138911 发帖数:23251 精华帖:881 |
23楼
主题:回复:再谈G120速度调节器参数的整定我是一定会做电机轴空载的动态辨识的。(除非是西门子有订货号的电机)因为我通常使用第三方电机。 空载做完后,将341=341X342,这样就知道该型号电机的转动惯量了。(记下,以后可直接使用) 然后根据情况做/不做带载动态。 带传动(深V、同步齿形带)张紧达到要求,可以做。然后(345参考要加大),手动减小增益、加长积分时间。否则可造成皮带轮发烫、过热。 直、斜齿传动,因有齿轮间隙存在,带载动态辨识后,手动减小增益、加长积分时间。否则主轴在快速调节时,异响很厉害;对机械传动造成伤害。 蜗轮蜗杆传动通常间隙很小,除非有异响,基本不需要手动调整。 所有,传动环节中无间隙的,都可以做动态辨识,获得最快的响应速度。 我的机械传动,是3D设计软件装配的,传动系惯量、减速比已知。通过动态辨识,可确认设计值和实际值误差。
学而时习之,不亦说乎?温故而知新,不亦乐乎?
|
|
yming 版主 经验值:138911 发帖数:23251 精华帖:881 |
24楼
主题:回复:再谈G120速度调节器参数的整定是这样: 静态辨识都要做,这是辨识电机自身的一些参数。 动态辨识,是为了计算出一个限值,以期达到最快的速度响应。(对来自给定的变化;对来自反馈的变化的响应),其结果是算出 345,上升时间。你不能再快过这个时间了。驱动系统没那个能力了。 实际运行肯定要比这个极限的上升时间要长。(还没加上负载呢) 对于第三方异步电机的默认值,并不是零,它以西门子最常用的4极异步电机为默认值。 空载的动态辨识,只是算出第三方电机的转动惯量。如果抬起小车,联接传动电机,就包括了传动轴系的(减速机、轴、驱动轮、从动轮)转动惯量。但不包括小车的惯量。实际运行中,小车的惯量将作为负载的一部分来对待。 做动态辨识的好处是,避免在快速响应的情况下出现过载、过流。因为系统已知到不能再快了。 对于没有快速响应要求的工况,不做也是可以的。
学而时习之,不亦说乎?温故而知新,不亦乐乎?
|
|
lxm650 至圣 经验值:14588 发帖数:868 精华帖:109 |
25楼
 主题:回复:再谈G120速度调节器参数的整定
主题:回复:再谈G120速度调节器参数的整定
看看我这个波形如何,斜坡上升时间约400ms,调节和响应要足够快才能做到实际和设定跟随好。这不光是调节速度环的比例,积分就能做到的。上图是直流系统的,正反组可控硅切换要等10ms的时间,仔细看这个时间对实际值还是有影响的(相当于这10ms不受控),如果是交流系统,波形更好。 最主要的是采用了前面版主提到的预控,预控,预控!蓝色曲线即是预控。 |
|
kdrjl 版主 经验值:146705 发帖数:36780 精华帖:452 |
26楼
主题:回复:再谈G120速度调节器参数的整定赞楼上。话不多,但句句干练和关键。 第一,关于预控对速调的作用; 第二,关于影响速调瞬态响应的时隙。 和我前段时间所做的观察类似,闭环控制的动态性能,不是仅PI参数所能满足需求的。加入预控分量很重要。而预控的物理意义选择,也很重要。比如说针对速度的瞬态性能要求,加入速度变化率的附加矫正能实现自己的需求。而转矩的闭环控制,速度的变化率可能会起反作用。等等。 因此,一个实际的闭环传动系统,如何实现高动态响应的需求。完全要看现场的具体条件来决定。同样一个传动系统,有人能实现需求,而有些人不论怎么整,就是不行。问题就出在,没有合理的,准确的掌握动态补偿分量的注入技术。预控和动补情况不同,效果截然不同。比如,闭环调节器的输入动态补偿和调节器的输出附加预控补偿。但这些补偿对于动态指标要求严格的系统,都是不可或缺的。
我是你的朋友
|
|
锋言锋语 至圣 经验值:26885 发帖数:3975 精华帖:54 |
27楼
主题:回复:再谈G120速度调节器参数的整定比如,启动时间优化的结果是0.4s,我这利用不到这么快,所以改成了2s左右 r345启动时间不是只读吗? 怎么修改?
不忘初心
|
|
kdrjl 版主 经验值:146705 发帖数:36780 精华帖:452 |
28楼
主题:回复:再谈G120速度调节器参数的整定哈哈,是呀,这就是埋下的伏笔。其实就是想让大家明白,参数r345受谁的影响。肯定是有一个P参数会影响改变r345的哟。 先找到它,改变了系统启动时间,然后速调的PI参数范围也就确定。 提示,y版的发言很有信息量。
我是你的朋友
|
|
锋言锋语 至圣 经验值:26885 发帖数:3975 精华帖:54 |
30楼
主题:回复:再谈G120速度调节器参数的整定可以trace一下满足启动, 得到启动时间,转矩, 参照 r345的100%启动转矩, 比例换算一下。 就是整体惯量对电机之比。
不忘初心
|
|
kdrjl 版主 经验值:146705 发帖数:36780 精华帖:452 |
31楼
主题:回复:再谈G120速度调节器参数的整定关于速调参数手动整定的方法,那本应用指南里已经有讲。这里不赘述。你说的这些完全可以。利用trace获取速调参数的最理想参数。不过,对于速度变化的预控参数,还是没有涉及。需要通过trace获取的时间常数逆向反推传动轴的惯性比。否则预控信号得不到更好优化。
我是你的朋友
|
|
kdrjl 版主 经验值:146705 发帖数:36780 精华帖:452 |
32楼
主题:回复:再谈G120速度调节器参数的整定你能读懂下面的两张图吗?
这两张图,对速度设定值和速度实际值都使用了同样的负载惯性模型。一个是以速度设定值为关联,另外一个是以转矩设定值(实际上就是速调的输出信号)为关联。用系统的启动时间(惯性)去做动态的预控(补偿)。 如果你还是不知道r345是由谁决定的?那我就无语了。我觉得你应该上机操作。只有动手,才能更好的对照原理图(功能图)解惑。
我是你的朋友
|
|
锋言锋语 至圣 经验值:26885 发帖数:3975 精华帖:54 |
33楼
主题:回复:再谈G120速度调节器参数的整定通过P341和P342来达到更改启动时间, 和改变惯量模型。 这个我能明白。 有两个问题:
不忘初心
|
|
锋言锋语 至圣 经验值:26885 发帖数:3975 精华帖:54 |
34楼
主题:回复:再谈G120速度调节器参数的整定我想了想, 版主修改r345的目的, 是因为其实空载测试得出的, 不能反应真是负载, 所以手动修改? 因为系统真是惯量, 反映在加速预控中, 也反映在反馈动态补偿中?
不忘初心
|
|
锋言锋语 至圣 经验值:26885 发帖数:3975 精华帖:54 |
35楼
主题:回复:再谈G120速度调节器参数的整定比如,启动时间优化的结果是0.4s,我这利用不到这么快,所以改成了2s左右,同理,相应改变了积分时间和前馈预控,并适当降低了放大倍数。加大惯性时间的目的是想把动态变化的平缓。减小负载变化冲击。 我一开始的理解是, 系统自动识别的是0.4S. 版主希望减缓,因此更改参数,改变启动时间。 但是其实是因为真实负载不可能实现0.4S, 所以要估算系统整体惯量,更改P342. 是这样吧? K版。 我原理以为系统自动设备的电机动态参数, 进行部分的预控补偿就可以了。 但是其实可以根据系统负载的类型, 进行进一步优化的,以此来充分利用系统的控制性能。 学习了。谢谢。
不忘初心
|
|
kdrjl 版主 经验值:146705 发帖数:36780 精华帖:452 |
36楼
主题:回复:再谈G120速度调节器参数的整定关于图2,你可以看它的输出,去的是图6730吧,在那张图,它与转速实际值叠加了。什么意思?就是实时在速度实际值上对转矩的变化量做一个动态的补偿。当然,注释里讲仅针对SLVC系统。 看西家传动的功能图,可以学习和认识西家传动的闭环控制策略和技术风格。为日后自己做闭环控制的设计提供一个思路和参考。比如说,将来你如果用DCC去做一些复杂的,特殊的工艺控制时,就会考虑如何自己去加一些动态补偿,以满足设定值和实际值快速跟随的需求。 本楼说飞剪控制的精华帖,就是一个经典的例子。如果没有补偿或者叫预控,飞剪的实际转速在起步状态很难与设定值重叠。这样的快速跟随效果,没有预控根本做不到。
我是你的朋友
|
|
kdrjl 版主 经验值:146705 发帖数:36780 精华帖:452 |
37楼
主题:回复:再谈G120速度调节器参数的整定终于能理解我的本意了。谢谢! 其实传动控制的调试,没有什么神秘之处。它无非就是两个要点,第一,调节器的PI参数乘积,与系统的负载惯性时间常数有密切的关系;第二,如果要实现良好的设定值与实际值的跟随效果,补偿和预控是不可或缺的,而且动态时间常数要符合与实际的负载惯性时间常数相匹配。 即: 2 * r345 = 速调P * I_这是西家传动传统的推荐计算公式。但不是绝对的; 改变P342_惯性比可以改变r345_系统启动时间。 应用SINAMICS中,有了上述两条,玩转传动速度环的调试,没有问题。 关于惯性比,在伺服控制应用中,比较常见的一个关注的参数;而在传动应用中,过去不提这个参数,好像也没这个参数,都是系统的启动时间。比如,6RA直流系列,6SE70交流系列。都是通过设置系统的启动时间来对应负载惯性的。到了SINAMICS,就把伺服与VC的这个物理量都统一采用惯性比设置的形式了。形式不管怎么变,自控原理没变,古典控制理论也没变。还是那些玩意。
我是你的朋友
|
|
锋言锋语 至圣 经验值:26885 发帖数:3975 精华帖:54 |
38楼
主题:回复:再谈G120速度调节器参数的整定我刚刚在研究直流80的惯性补偿, 刚发现P50540加速时间。 刚要发表点看法, 就看到这个回帖。简直如饮甘怡,其妙不可言。
不忘初心
|
|
kdrjl 版主 经验值:146705 发帖数:36780 精华帖:452 |
39楼
主题:回复:再谈G120速度调节器参数的整定用STARTER调试G120或者S120时,其步骤在那本应用指南里都有了。我在实际操作中,有一个自己的流程。 第一步,计算机里在STARETR界面下,先建一个空文件。 第二步,设置计算机的通讯地址,实现计算机与装置之间的在线连接。 第三步,在线后,先对装置做工厂化参数复位,注意,此操作结束以后,一定要给装置断电,再上电,工厂化参数复位才生效。这是指南里强调的。 第四步,在线后,把装置里的参数,上传计算机文件,并保存。 第五步,离线配置快速调试的流程。 第六步,在线下载离线建立的参数文件。 第七步,打开STARTER里的操作面板,启动变频器,对电机进行静态计算与优化。结束以后自动停止。如果电机轴可以自由转动,还要做一下动态的优化与辨识。(P1900 = 1)。 第八步,检查P2000至P2003的参数,使其为最大值,然后检查r345与速调PI参数是否需要调整,并通过trace,检查速度调节器的调节状态是否满足需求。 第九步,设置工艺文件(参数的过程布线)。包括端子的参数设置等。 第十步,结束调试。 这里,有一个细节需要说明,在快速调试的参数中,虽然我们设置P1082的最高转速,但是如果最高转速超过了电机额定频率的同步转速,此时P2000默认的设置就是电机额定频率的同步转速值。所以在开机运行时时,它的最高转速被限制在了P2000设置转速。达不到实际的最高转速。比如,电机的最高转速是6000rpm,而实际P2000默认的是3000rpm。此时如果不对P2000进行修改,那操作面板最高只能被限制在了3000rpm。 所以,我们在调试验证速度调节器的参数时,一定要先对P2000的参数进行检查,把它修改成最高转速即可。当然,如果你的系统最高转速就是电机额定频率下的同步转速,那就无所谓了。
我是你的朋友
|
|
kdrjl 版主 经验值:146705 发帖数:36780 精华帖:452 |
40楼
主题:回复:再谈G120速度调节器参数的整定如果是批量调试,是不是可以用一套调试好的参数文件,去覆盖批量调试的CU参数文件呢?对于相同的电机和相同的变频器,当然可以。但我还是习惯,批量调试,大家一致的参数文件,建立起公共的用户文件,也就是CDL和XML两套文件,用STARTER提供的用户文件的功能去批量调试。而针对每一个系统的电机等效模型建立和动态辨识与优化,还是要单独各做各的。
我是你的朋友
|











 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 自动化标准机型应用中心
自动化标准机型应用中心 官方商城
官方商城