| 作者 | 主题 |
|---|---|
|
工控小鱼人 游士 经验值:287 发帖数:29 精华帖:1 |
楼主
主题:西门子V90伺服Profinet通讯用FB284控制方法(个人分享) 
西门子V90伺服Profinet通讯用FB284控制方法 个人总结,仅供参考 一.材料
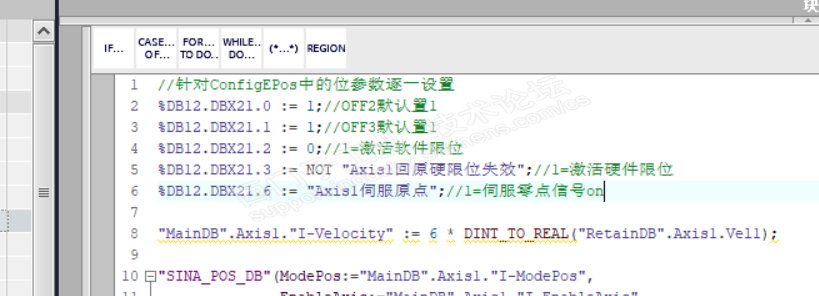
二.流程 两个限位传感器必须为常闭信号且需接入伺服驱动X8接口,本例接入1号脚和3号脚。原点传感器可常开可常闭且需接入PLC任意物理输入点,本例接入I0.1。 1.打开博途软件,新建项目,添加PLC新设备,组态IP地址192.168.10.10,255.255.255.0以及设备名称PLC_1 2.组态V90硬件, IP地址以及设备名称,采用111标准报文 3.在程序中导入FB284官方功能块,打开功能块,在930行下方新增一行代码 4. 新建DB块,新建变量;新建断电记忆保持DB块;新建PLC变量 5. 在OB1中调用FB284官方功能块,管脚填写(为了更好的移植性,本文新建了SCL语言的OB1块) 在上方编写代码,将我们的定位速度参数转换为浮点数再乘以系数6再给到功能块Velocity接口中, "MainDB".Axis1."I-Velocity" := 6 * DINT_TO_REAL("RetainDB".Axis1.Vel1); (系数说明:本例伺服电机为增量编码器 TTL 2500 ppr,电机轴通过联轴器直连10毫米间距丝杠,在OverV参数设为100的前提下,当参数"RetainDB".Axis1.Vel1设置为10时,配合系数6,电机的实际定位速度为10毫米/秒。可根据实际应用调整此系数,多圈绝对编码器时系数为0.06) 继续在OB1上方预设参数。 第5行说明:当回原模式时,先手动将变量“Axis1回原硬限位失效”置1,限位保护功能失效,在电机碰到硬限位传感器时会自动反转寻原点方向。回原结束时手动将此变量置0,限位保护功能生效。 第6行说明:原点信号接入功能块接口,此例为常开信号;如果为常闭信号,则取反接入。
下载至PLC 6.V-Assistant软件用miniUSB线连接驱动器,在线读取,选择电机型号,控制模式 选择111报文,无辅助报文 配置网络参数和设备名称(需与博途软件内V90伺服硬件组态一致) 7.机械结构的参数设定 本例电机采用联轴器直连丝杠,所以N/M为1/1; 负载转动一圈的长度单位设为1000,本例丝杠间距10毫米。当我们给1000的目标位置时,伺服电机刚好会转一圈,也就是丝杠会带动负载位移10毫米,那么定位精度就是0.01毫米。 斜坡功能激活 配置正负硬限位 配置回零参数,使能反向挡块选是,回原时碰到硬限位会自动反向搜索原点信号 最后保存参数到ROM,重启伺服驱动 具体FB284功能块的管脚定义请参照官方文档,此文不作说明。 |











 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城