| 作者 | 主题 |
|---|---|
|
反转地球 侠圣 
经验值:3064 发帖数:557 精华帖:2 |
楼主
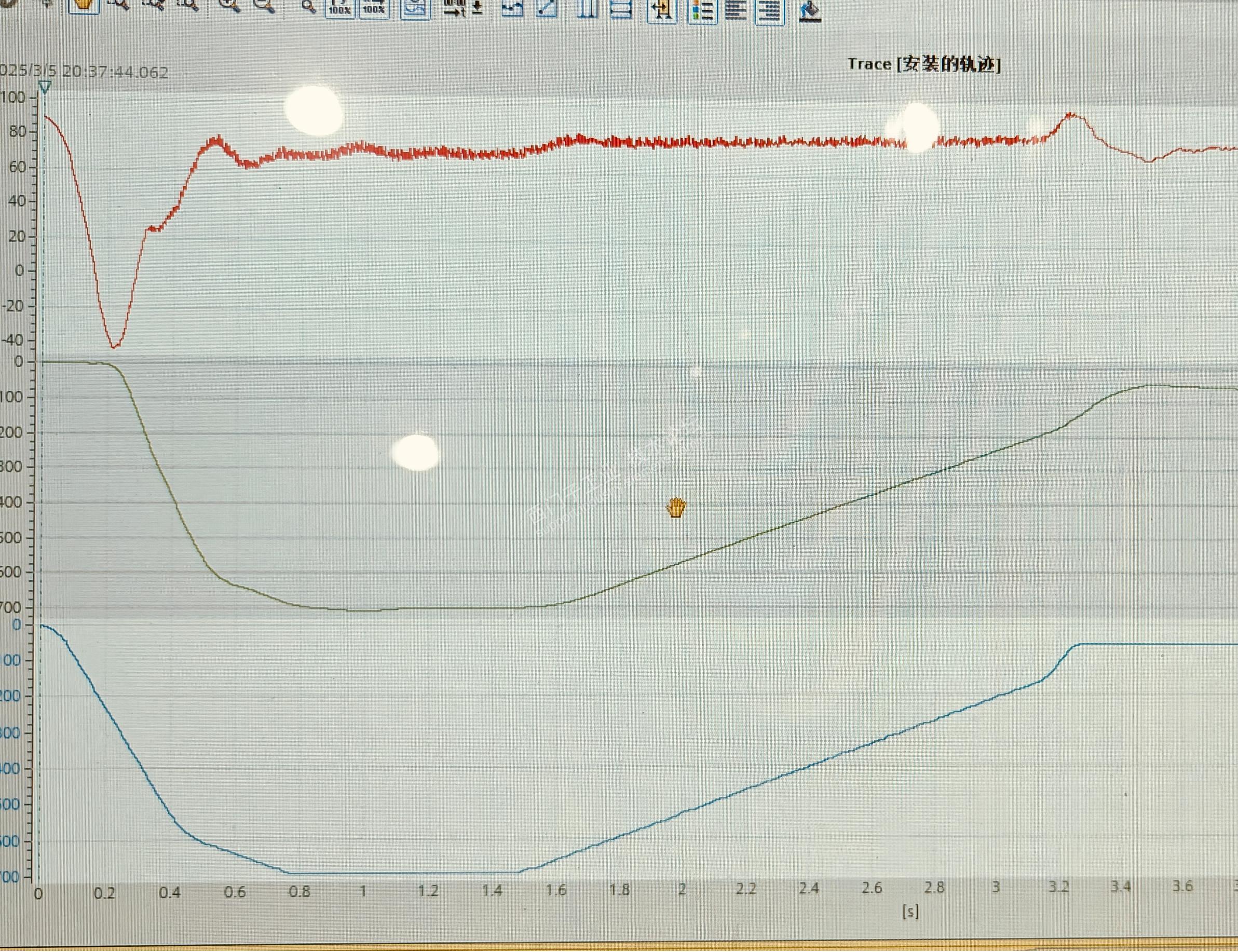
主题:G120C做升降驱动时采集的TRACE分析 
驱动器设置的时专家模式,转速控制无编码器,电机参数输入,抱闸打开时间100ms,抱闸关闭时间850ms,加减速都是1S,然后电机静态学习,学习完之后手动输入上升下降,采集TRACE。
如上图所示,给电机使能后进行向下运动,电机转矩先向下然后向上,实际升降装置是有下坠的,然后又达到设置的转速80.
这是向上运动的TRACE图,速度也是80 然后我把1755无编码器的转换速度从原先的100改为50,把1475从原先的0%改为跟随P2930,P2930设置为90.进行下降测试,发现下坠没有了
如图,设置转速为80,向下运动。初始状态有转矩的话,电机会有一段时间速度为0,如果1475设置默认为0%(0%是电机的励磁电流),那么速度响应会很快。但是跟随很好,速度超了一点点立马就在80左右了,不会有超到300的现象。
如上两个图所示,这是我跑的自动速度,精确定位的。当速度从0开始加时,实际速度与设定速度相差很大,虽然时间很短。但是跟随行很差,2930我设置的是90,1755设置的是50.然后我下降一米多时,电机失速了就自由落体没控制住,请问我到底时哪个参数没设置对。
生命在于学习。活到老学到老
|
|
反转地球 侠圣 经验值:3064 发帖数:557 精华帖:2 |
13楼
主题:回复:G120C做升降驱动时采集的TRACE分析
就是这个堆垛机,今天把它甩出来与大伙见个面。 昨天应该算是弄好了吧,把1610增加到135%,然后把1470 P增益由原来的3.53改为5。后面速度跟随效果就非常的好。
然后我把P增益又改为3.52,发现速度跟随又变差了,最后改为5.试了下重载,效果很好,已经不自由落体了,而且速度跟随也很好。上图就是重载的速度跟随效果。
生命在于学习。活到老学到老
|











 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 自动化标准机型应用中心
自动化标准机型应用中心 官方商城
官方商城