| 作者 | 主题 |
|---|---|
|
kdrjl 版主 
经验值:136691 发帖数:34950 精华帖:435 |
楼主
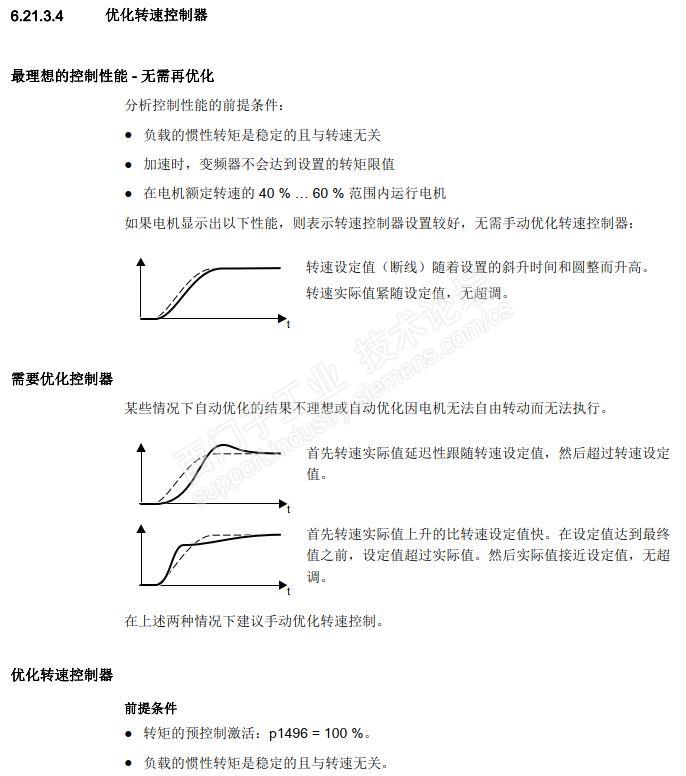
主题:关于STARTER操作面板的动态辨识与优化 采用STARTER内置的操作面板调试,它的设定值是阶跃给定性质。这就为调试动态性能提供了方便。
如图示,STARTER的控制面板的给定是从斜坡函数发生器输出加入的,没有经过加减速的斜坡,所以只要设定好转速,直接启动,即可获取阶跃响应的效果。 调试速度环的PI参数,采用阶跃设定值是必须的。有了这个性质,调试就很方便了。
我是你的朋友
|
|
风起云 至圣 经验值:16000 发帖数:713 精华帖:114 |
6楼
 主题:回复:关于STARTER操作面板的动态辨识与优化
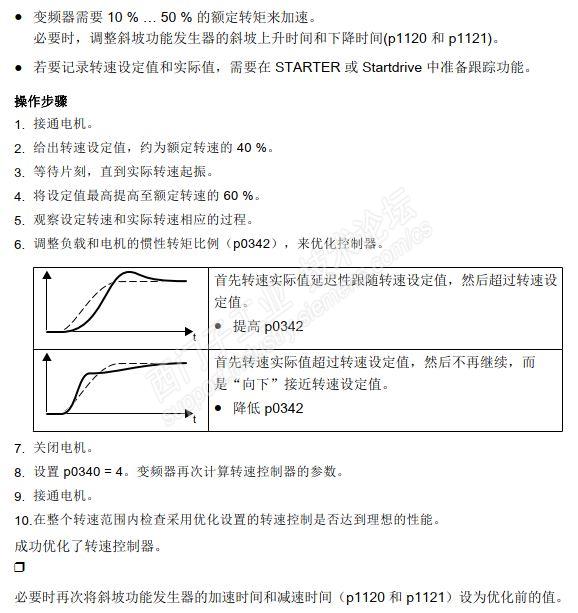
主题:回复:关于STARTER操作面板的动态辨识与优化K版抛出一堆玉,我也扔块砖。 为什么大家比较关注转动惯量这个参数?为了更好的优化速度控制器。如果不测量转动惯量的实际值也能优化,是不是就不用纠结这个问题了?直接放图。
驱动技术交流 Email: sf82@sina.cn
|
|
Zane 至圣 经验值:76112 发帖数:19121 精华帖:378 |
7楼
主题:回复:关于STARTER操作面板的动态辨识与优化优化是个收敛的过程,大惯量甚至超大惯量比负载,往往无法优化,原因优化不能收敛。 我做G120大惯量比负载的优化的经验是: 1)开环矢量不适合大惯量比的负载优化,闭环控制是首选。 2)根据电机手册,先设置P341,先要脱开负载做辨识优化,测出电机减速机轴系的转动惯量,即P342,得到数据应根据电机减速机手册查到的转动惯量数据进行理论值与实测值的核对。 3)计算负载的转动惯量,折算到电机轴端,除以P341的比值加上脱开负载的惯量测量值,即得到新的P342的预估值,不用太准确,在数量级范围内即可,预设P342后,带上负载再次优化,系统会测出总转动惯量,并更新P342的值。 4)优化通过后,通过获取的转动惯量值,可以计算出较为合理的升降速时间,设置P1120/1121,此时系统应该可以表现出较好的速度跟随特性。 5)长时间运转一下,调整一下编码器的滤波 6)接下来可以做摩擦转矩测量 7)再做一两次带载优化,对比一下速度环增益,积分常数,转动惯量等参数的差异,变化不大即优化成功。 8)编码器反馈的EMC工作一定要做好,系统才能获取较好的运行性能。 9)有限行程大惯量比负载电机的优化,能做的自动优化也就是脱开负载的情况下,带载优化还是需要建立在精确计算的基础上的人工优化方式来实现。
Zane
注册自动化系统工程师
Always save before download
|
|
yming 版主 经验值:127286 发帖数:21992 精华帖:824 |
10楼
主题:回复:关于STARTER操作面板的动态辨识与优化Zane大侠说得不错。因现在大多使用软件设计。轴系的转动惯量都是已知的。很容易折算到电机轴处,得出系统惯量比P342。 对于SLVC控制: 在无间隙传动系统中(如滚珠丝杠传动、钢丝同步带),基本与测试结果无差。 但是在有间隙传动系统中(如齿轮传动)、有弹性环节传动中(橡胶带传动),计算值要比测试结果更准确。测试优化往往都需要手动减低响应速度(过快)。 特别要注意的是:这里的转动惯量与前馈预控紧密相关。模拟量给定的稳定性至关重要。对于一些电位器的模拟量给定,本身就不稳定,前馈预控总在“捣乱”。 最后说一点,对于SLVC,针对系统转动惯量来说,不管优化好与不好,只要速度控制器含有PI,最终稳定转速时,电机速度平均值总是等于给定值。 优化得不好, 给定方面,只会影响变速响应过程。 负载方面,对于大惯量传动系统,负载变动影响较小;而小惯量传动系统,就需要更加仔细的调整优化;满足负载变动时的速度响应。这在一些加工中,是会影响质量的。
学而时习之,不亦说乎?温故而知新,不亦乐乎?
|
|
lxm650 至圣 经验值:13626 发帖数:856 精华帖:103 |
17楼
主题:回复:关于STARTER操作面板的动态辨识与优化我补充1点,西门子关于速度环的整定公式,是基于抗扰动最优得出来的,所谓中频宽h=4的典型II系统整定方法。调速装置的优化有2大方向,1是抗扰动,例如匀速转动的轧机突然咬钢,这时速度必然会有一个降落再恢复的过程,抗扰动效果好的话速度降较少恢复时间较短。2是跟随速度给定值,要求对给定值跟随快,不超调或者尽量少超调。我们大多数遇到场合都是对抗扰动提出要求,所以按西门子的默认速度环整定是没有问题的,但如果是对跟随性能有要求,默认的参数就不一定合适了。有时甚至要取消速度环的积分,将速度环改成纯P调节器,也就是将速度环整定成典型I系统。 |










 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城














 短信登录
短信登录
