



















 西门子官方商城
西门子官方商城
- {{item.name}}
更多
操作指南
 5.0 分
5.0 分
IM174接口模块介绍
文档编号:A0228|
文档类型:操作指南|
发布时间:2024年03月04日
- 0
- 1383
- 5329
本文针对与通过Simotion C如何扩展IM174模块,如果组态,以及报文设置等。
在PLC与Simotion的应用中,有时需要模拟量调速或者步进电机驱动,IM174为其提供了一个设定通道、4个编码器的反馈通道以及数字量输入/输出接口。其中设定通道中含有4个模拟量输出与4个脉冲输出,模拟量输出用来控制伺服驱动器,脉冲输出可以驱动4个步进电机。
IM174集成Profibus DP接口,具有相应的报文结构:标准报文3。对于IM174,仅仅支持周期性通讯,不支持非周期性通讯。周期性通讯过程中,IM174接收驱动编码器返回的实际速度通过Profibus传输给控制器PLC或Simotion, 控制器在完成运算后将速度设定通过Profibus通讯输出给IM174, 然后再通过模拟量通道输出给驱动。
IM174的控制器可以为SimotionC、SimotonD、SimotionP、TCPU或者是普通的PLC。其中SimotionC本身也有含4个模拟量输出的设定值通道与4个编码器反馈通道。通过扩展一个IM174就可以驱动8个带模拟量接口的驱动器。
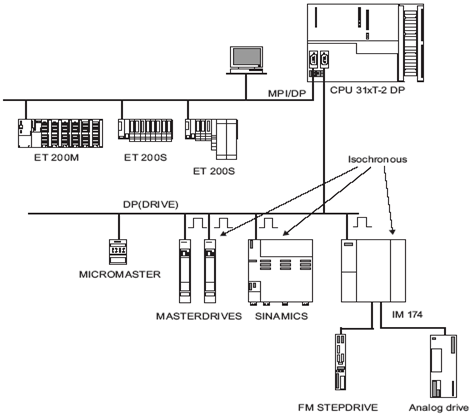
IM174可以控制模拟量驱动器(simodrive 611U),步进电机,还有第三方带模拟量接口的驱动。
IM174可以连接的编码器类型有TTL与SSI编码器。
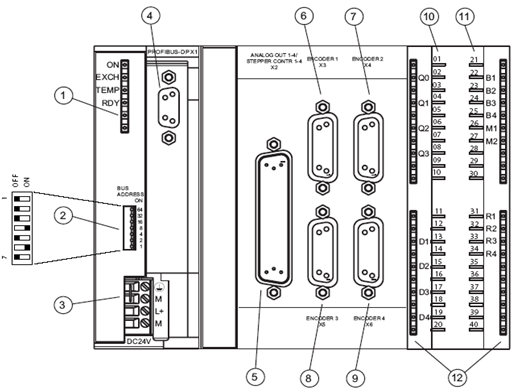
其外形如图2所示:
| 1 | ON/EXCH/TEMP/RDY | IM174的状态诊断灯 |
| 2 | Bus address | Profibus地址设定开关 |
| 3 | 24 VDC | 24V电源接口 |
| 4 | X1 | Profibus DP接口 |
| 5 | X2 | 4个轴的0-10V模拟量输出以及4个脉冲输出(用于控制步进电机) |
| 6 | X3 | 轴1编码器接口 |
| 7 | X4 | 轴2编码器接口 |
| 8 | X5 | 轴3编码器接口 |
| 9 | X6 | 轴4编码器接口 |
| 10 | X10 | 数字输入接口 |
| 11 | X11 | 数字输出接口 |
| 12 | 数字输入输出的状态显示 |
IM174设定值通道为50针的接口,其中包括4个轴的模拟量输出;4个轴的使能信号;4个轴的状态输出继电器以及4个步进电机的脉冲输出。如下表所示:
| 针 | 名 称 | 类 型 | 功能 |
| 1 | SW1 | VO | 轴一的模拟量设定(0-10V) |
| 2 | BS2 | VO | 轴二模拟量设定的参考地 |
| 3 | SW3 | VO | 轴三的模拟量设定(0-10V) |
| 4 | BS4 | VO | 轴四模拟量设定的参考地 |
| 5 | PUSLE 1 | O | 脉冲轴一(步进)的输出 |
| 6 | DIR1 | O | 轴一的方向 |
| 7 | PULSE2_N | O | 脉冲轴二(步进)的N端 |
| 8 | DIR2_N | O | 轴二方向的N端 |
| 9 | PUSLE 3 | O | 脉冲轴三(步进)的输出 |
| 10 | DIR3 | O | 轴三的方向 |
| 11 | PULSE4_N | O | 脉冲轴四(步进)的N端 |
| 12 | DIR4_N | O | 轴四方向的N端 |
| 13 | - | - | - |
| 14 | RF1.1 | K | 轴一使能的继电器输出1 |
| 15 | RF2.1 | K | 轴二使能的继电器输出1 |
| 16 | RF3.1 | K | 轴三使能的继电器输出1 |
| 17 | RF4.1 | K | 轴四使能的继电器输出1 |
| 18 | Enable1 | O | 轴一使能 |
| 19 | Enable 1_N | O | 轴一使能的N端 |
| 20 | Enable 2 | O | 轴二使能 |
| 21 | Enable 2_N | O | 轴二使能的N端 |
| 22-25 | ground | O | 地端 |
| 26 | Enable 3 | O | 轴三使能 |
| 27 | Enable 3_N | O | 轴三使能N端 |
| 28 | Enable 4 | O | 轴四使能 |
| 29 | Enable 4_N | O | 轴四使能N端 |
| 30-33 | - | - | - |
| 34 | BS1 | VO | 轴一模拟量设定的参考地 |
| 35 | SW2 | VO | 轴二的模拟量设定(0-10V) |
| 36 | BS3 | VO | 轴三模拟量设定的参考地 |
| 37 | SW4 | VO | 轴四的模拟量设定(0-10V) |
| 38 | PULSE1_N | O | 脉冲轴一(步进)的N端 |
| 39 | DIR1_N | O | 轴一方向的N端 |
| 40 | PULSE2 | O | 脉冲轴二(步进)的输出 |
| 41 | DIR2 | O | 轴二的方向 |
| 42 | PULSE3_N | O | 脉冲轴三(步进)的N端 |
| 43 | DIR3_N | O | 轴三方向的N端 |
| 44 | PULSE4 | O | 脉冲轴四(步进)的输出 |
| 45 | DIR4 | O | 轴四的方向 |
| 46 | - | - | - |
| 47 | RF1.2 | K | 轴一使能的继电器输出2 |
| 48 | RF2.2 | K | 轴二使能的继电器输出2 |
| 49 | RF3.2 | K | 轴三使能的继电器输出2 |
| 50 | RF4.2 | K | 轴四使能的继电器输出2 |
以simodrive611A为例,采用四路模拟量设定,连接如下图:
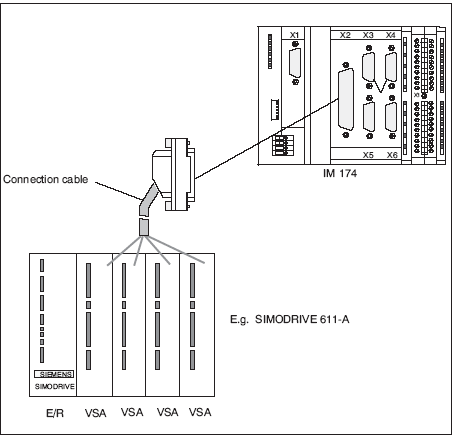
如果用IM174来驱动步进电机,则需要将设定通道与步进电机的驱动模块相连,如西门子的驱动模块为FM- STEPDRIVE。两种连接共用一根电缆,但连接端子号不同。

编码器接口
X3,X4,X5,X6分别为轴一,二,三,四的15针编码器反馈接口,能接编码器的类型有TTL增量编码器(RS422)与带SSI接口的绝对值编码器。
| 针号 | 定 义 | 类 型 | 功 能 | |
| 增量式(TTL) | 绝对值(SSI) | |||
| 1 | 无定义 | - | - | |
| 2 | - | CLS | O | SSI 移位时钟 |
| 3 | - | CLS_N | O | SSI移位时钟反向 |
| 4 | P5EXT | VO | 5V供电电压 | |
| 5 | P24EXT | VO | 24V供电电压 | |
| 6 | P5EXT | VO | 5V供电电压 | |
| 7 | MEXT | VO | 供电电源参考地 | |
| 8 | - | - | - | |
| 9 | MEXT | VO | 供电电源参考地 | |
| 10 | N | I | 零脉冲信号 | |
| 11 | N_N | I | 负零脉冲信号 | |
| 12 | B_N | I | 负的B脉冲通道 | |
| 13 | B | I | B脉冲通道 | |
| 14 | A_N | I | 负的A脉冲通道 | |
| - | DATA_N | I | 负的SSI信号 | |
| 15 | A | I | A脉冲通道 | |
| - | DATA | I | SSI信号 | |
IM174的报文结构如下,其中每一个轴所对应的报文结构STD3又可以分解如下:
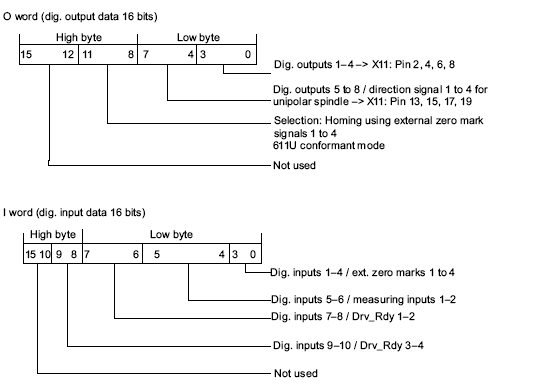
从IM174传输给PLC的状态字:

PLC发给IM174的控制字:
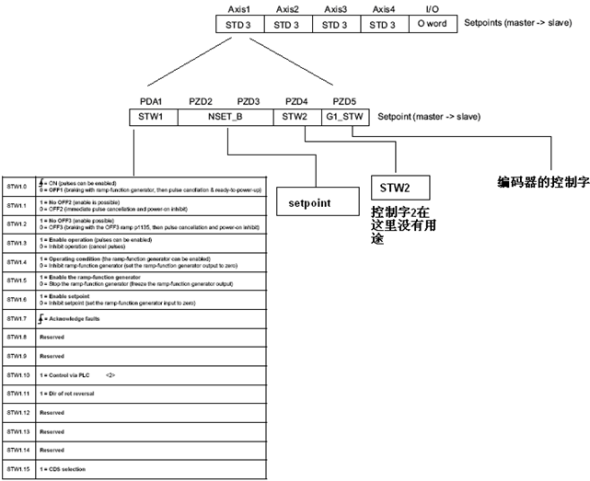
另外,I word 与 Q word所对应的含义如下:
从IM174的报文结构我们可以看出,我们可以通过IM174对驱动实现速度控制,也可以在上位机中来实现位置控制,但是位置控制精度不高。同Simotion C230相比,两者位置控制示意图如下:

C230闭环位置控制
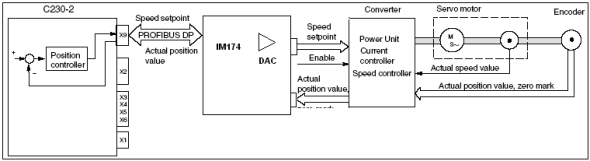
上位机扩展IM174接口实现位置控制
可以看出,通过IM174接口的位置控制,比C230多一个数据传输环节,这会给控制回路带来时间上的延迟,因此其定位精度不高。
在SOUT或者STEP7中组态IM174:
在硬件组态中插入IM174, 会自动弹出以下画面,选择4个轴的标准报文3。

如上图所示,我们选择了四个轴的标准报文3,从PQW532开始的5个字为第一个轴的控制字,从PIW532开始的9个字为第一个轴的状态字,其它轴依次类推。
激活时钟同步
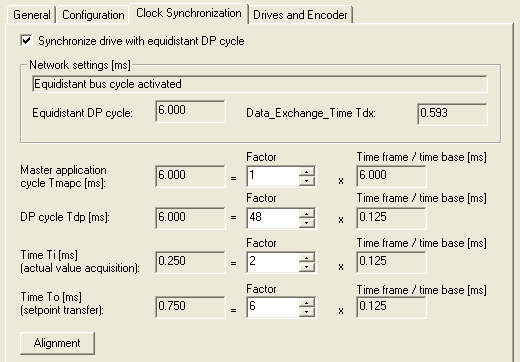
需要注意的是从站的DP循环周期必须要同主站的DP循环周期一致。
Ti的设置范围:DP cycle >= actual value acquisition >= base time
To的设置范围:DP cycle >= setpoint accept. >= equidist. master cycl. component + base time
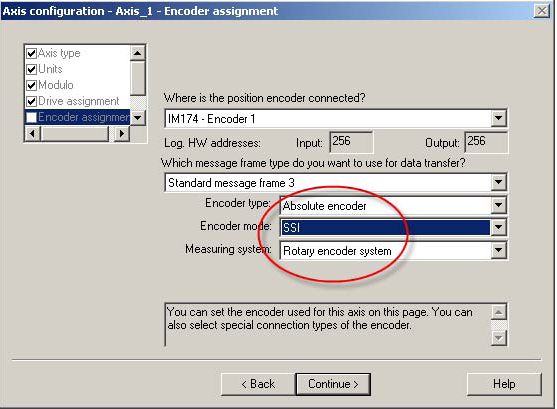
在DP组态过程中设置编码器属性:
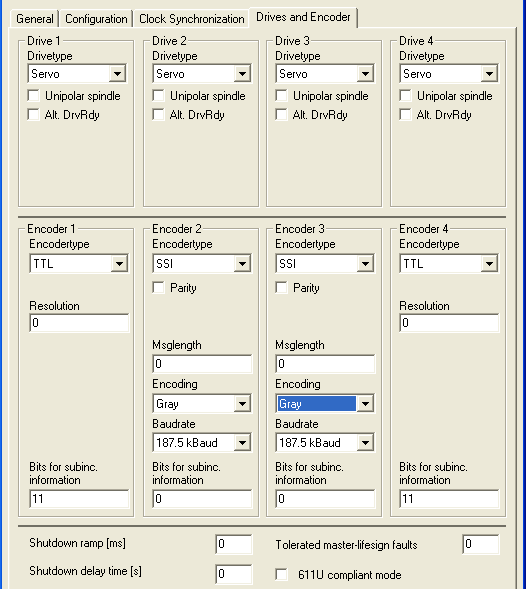
编码器相关参数
举例(12-bit multiturn, 13-bit single-turn)


在TCPU中或Simotion中组态轴时也需要对编码器参数进行设置:
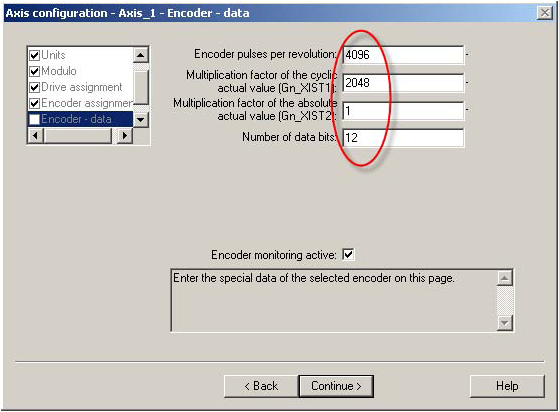
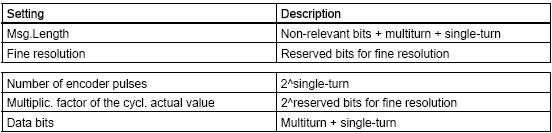
具体含义如下:
Number of encoder pulses:编码器脉冲数
Number of data bits:编码器有用数据长度
Multiplication factor of the absolute actual value (Gn_XIST2): 绝对值编码器设定值为1
Multiplication factor of the cyclic actual value (Gn_XIST1):编码器分辨率的保留位,2^(Step 7, HW Config: "Reserved bits for fine resolution") =211 = 2048
其它功能:
Measuring input
IM174模块支持快速输入点的上升沿与下降沿触发,但不能同时测量上升沿与下降沿。此功能要用到IM174的数字输入点,通常借助于端子26,27来完成此任务。

Homing using encoder zero mark and homing output cam
在上位机中作定位控制时,我们可以利用IM174来实现轴的回零点,回零点的方式可以选择编码器零脉冲与外部粗脉冲。

IM174的数字输入点为我们提供了粗脉冲的输入点:

另外,IM174还为上位机提供了四个驱动器的状态点:

关键词
IM174


- 评论
更多
-
分享

手机扫码分享文档(需在手机端重新登录账号)
- 收藏 收藏
- 点赞 点赞
- 纠错 纠错







 关联文档
关联文档






{{item.nickName}}