



















 西门子官方商城
西门子官方商城
- {{item.name}}
更多
操作指南
 5.0 分
5.0 分
PCS 7 V7.1 APL库中的斜坡(Ramp)功能
文档编号:A0542|
文档类型:操作指南|
发布时间:2024年02月06日
- 0
- 1550
- 1929
在某些工艺条件下,要求设定值在一定时间范围内或者以一定斜率逐渐增加或下降,而不是突然跳变。在PCS 7 V7.1的APL库中,PID控制块PIDConL,模拟量操作块OpAnL, 电机调速块MotSpdCL的SP值,模拟量阀门块VlvAnL的MV都具有斜坡(Ramp)功能以满足上述要求。本文档以APL库的PIDConL功能块为例阐述了Ramp功能的具体实现途径。
1. 斜率限制关闭时,手动斜坡操作
1.1 手动斜坡操作的前提条件
- PID块处于自动控制模式下,设定值为内部给定。如图1。
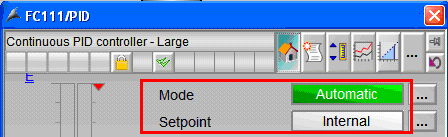
图1 PID控制模式
- 关闭斜率限制。在面板Ramp视图 下关闭Gradient limits on功能(CFC中SP_RateOn=0)。如图2。

图2 关闭Gradient limits on功能
1.2 手动斜坡操作的两种实现方式
- 设置时间范围
通过面板选择Ramp mode为Duration或者在CFC中设置SP_RmpModTime=1。如图3。这种方式下,当前设定值会在设置Duration时间内到达Target setpoint。
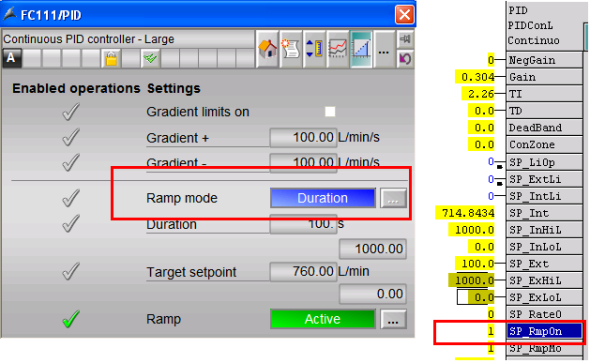
图 3 按照时间方式改变的设定值
- 设置Ramp斜率
通过面板选择Ramp mode为Gradient或者在CFC中设置SP_RmpModTime=0 (图 4)。设定值以面板中设定的Gradient +和Gradient –,对应CFC中SP_UpRaLim和 SP_DnRaLim为斜率值增加或减少,直至到达目标设定值。
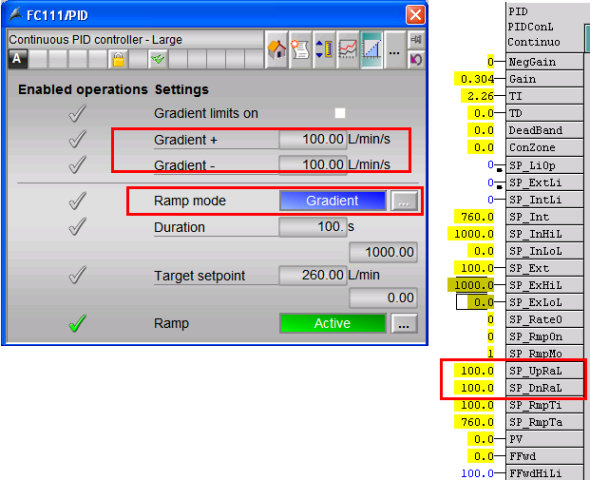
图4 按照斜率方式改变的设定值
1.3 手动斜坡操作
- 输入目标设定值
在Ramp视图中输入目标设定值(Target setpoint, CFC中, SP_RmpTarget),目标设定值与原设定值不同,也就是设定值发生变化时,可以开始手动斜坡操作。如图5。
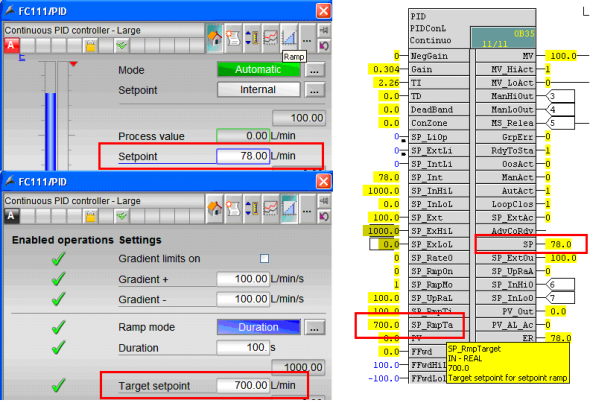
图5 SP≠SP_RmpTarget
- 启动Ramp操作
在Ramp处选择Active,启动Ramp操作,也就是CFC中SP_RmpOn=1。如图6。注意:这里只能是面板选择,CFC中无法修改管脚值。
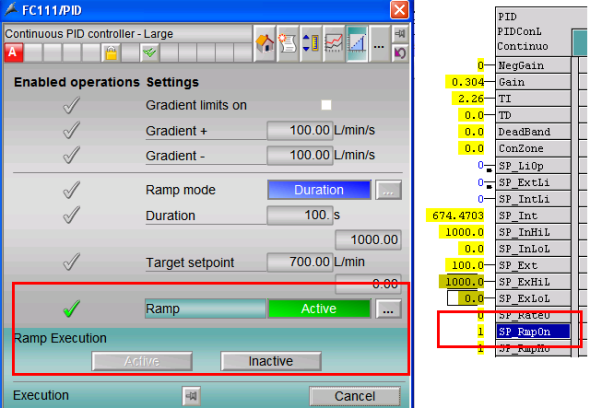
图6 激活Ramp功能
- Ramp功能结束
当设定值到达目标设定值后,Ramp会自动跳回Inactive状态,SP_RmpOn=0。
2. 打开斜率限制
在面板上勾选Gradient limits on,或者在CFC中设置SP_RateOn=1,激活斜率限制。如图7。
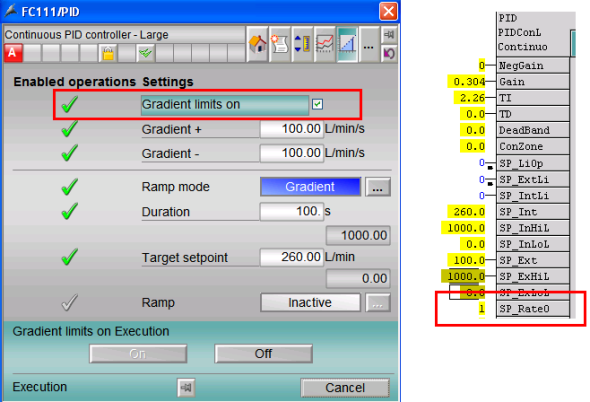
图 7 关于Gradient limits on功能
图8中设定值无论是内部给定还是外部给定,都会按照Ramp视图中的Gradient +和Gradient – (对应CFC中SP_UpRaLim和SP_DnRaLim) 所设置的斜率增加或减少。
这种情况下,Ramp视图中的手动斜坡功能不可用。
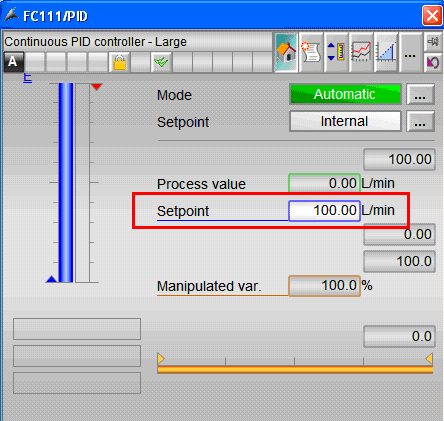
图 8 PIDConL的设定值
3. 具有Ramp功能的功能块
下面的表格列出了APL中具有Ramp功能的功能块,以及Ramp操作的前提条件。
| 功能块 | 设定值(SP)给定方式 | 斜率上下限(Gradient limit on) | 操作模式 |
| 与Controller相关,比如PIDConL等 | 内部给定 | 关闭 | 自动模式 |
| OpAnL | 内部给定 | 关闭 | |
| MotSpdCL | 内部给定 | 关闭 |
表1适用Ramp功能的功能块(设定值)
| 功能块 | 操作值(MV)给定方式 | 斜率上下限(Gradient limit on) | 操作模式 |
| VlvAnL | 内部给定 | 关闭 | 手动模式 |
表 2 适用Ramp功能的功能块(操作值)
关键词
PCS 7 V7.1, 高级过程库,APL , 斜坡,PIDConL,OpAnL,MotSpdCL,VlvAnL


- 评论
更多
-
分享

手机扫码分享文档(需在手机端重新登录账号)
- 收藏 收藏
- 点赞 点赞
- 纠错 纠错





 关联文档
关联文档






{{item.nickName}}