


















 西门子官方商城
西门子官方商城
- {{item.name}}
更多
操作指南
 5.0 分
5.0 分
SIMOTION轴的监视功能
文档编号:A0704|
文档类型:操作指南|
发布时间:2024年01月24日
- 0
- 1515
- 1354
1 概述 SIMOTION系统中,对于轴工艺对象,系统提供了一系列的监视功能来对其运行状态进行监视。在轴使能以后,如果轴的实际位置、实际速度与设定值偏差超过某门限值,就会有相应的错误信息产生(比如50106,Position Monitoring Error),并会带来相应的系统响应(比如轴去使能RELEASE_DISABLE)。如果这些门限值设置的不合适,或者轴的特性优化得不理想,或者机械系统本身就有问题,就很可能会出现这些错误信息。在实际应用中,需要根据实际情况去灵活调整,以完全发挥这些监视功能的作用。在有必要的情况下,也可以屏蔽某些错误或者修改错误响应方式,配置方法可以参考下载中心文档F0693。本文主要对监视功能的工作原理和可配置的参数进行介绍。 ......
1 概述
SIMOTION系统中,对于轴工艺对象,系统提供了一系列的监视功能来对其运行状态进行监视。在轴使能以后,如果轴的实际位置、实际速度与设定值偏差超过某门限值,就会有相应的错误信息产生(比如50106,Position Monitoring Error),并会带来相应的系统响应(比如轴去使能RELEASE_DISABLE)。如果这些门限值设置的不合适,或者轴的特性优化得不理想,或者机械系统本身就有问题,就很可能会出现这些错误信息。在实际应用中,需要根据实际情况去灵活调整,以完全发挥这些监视功能的作用。在有必要的情况下,也可以屏蔽某些错误或者修改错误响应方式,配置方法可以参考下载中心文档F0693。本文主要对监视功能的工作原理和可配置的参数进行介绍。
SIMOTION提供的轴监视功能有:
• 定位监视Positioning Monitoring
• 零速监视Standstill Monitoring
• 动态跟随误差监视Dynamic Following Error Monitoring
• 速度偏差监视Velocity Error Monitoring 仅用于速度控制
在SIMOTION SCOUT项目中,插入一个轴(比如Axis_1)以后,双击其中的Axis_1 ® Monitoring可以打开轴的监视功能配置画面,设置轴的各种监视功能。
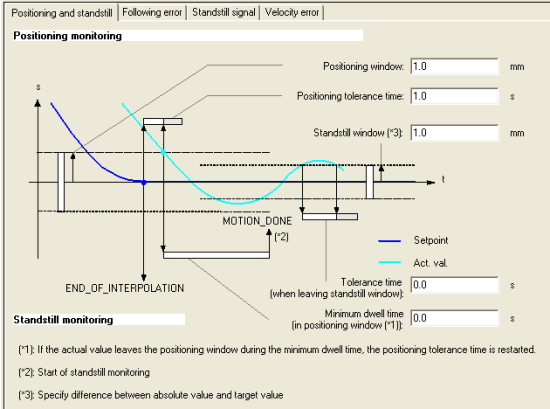
图1 轴的定位与零速监视
}
用于位置控制
2 定位监视(Positioning Monitoring)
在进行轴定位操作时,在位置设定值插补结束后,轴的实际位置开始被监视。该功能称为定位监视,但并不等于到达目标位置,而是实际位置进入一个范围内,称之为“定位窗口(Positioning Window)”,如图1所示。
监视过程如下:
(1) 位置设定值插补完成,图1中“定位容错时间”(Positioning Tolerance time)定时器开始计时。
(2) 如果在“定位容错时间”内,实际值未进入定位窗口,系统会报50106错误,轴的默认响应是去使能,定位监视功能也随之结束。反之,如果实际值进入定位窗口,图1中“最小停留时间”(Minimum dwell time)定时器开始计时。
(3) 如果在“最小停留时间”内,实际位置重新离开定位窗口,那么“定位容错时间”定时器重新启动,返回第2步。如果实际位置重新进入定位窗口,那么“最小停留时间”定时器重新启动。
如果在“最小停留时间”内,实际位置没有离开定位窗口,那么系统变量motionStateData.motionCommand会变成MOTION_DONE,同时零速监视功能起动。
在轴的系统变量servoMonitoring.positioningState中,可以查看定位监视的状态。在压力控制、力控制激活时,定位监视、跟随误差监视会被禁用。
3 零速监视(Standstill Monitoring)
在轴已经使能情况下,如果轴没有执行定位命令,此时零速监视功能处于激活状态。零速监视有一个零速监视窗口Standstill window和监视时间Tolerance time设置,如图1所示。如果实际位置离开了零速监视窗口,并超过了该容错时间,系统会报50107错误,轴的默认响应是去使能。
可以在轴的系统变量servoMonitoring.stillstand中查看其状态。
4 动态跟随误差监控功能(Dynamic Following Error Monitoring)
在进行定位的过程中,轴的实际位置必然滞后于设定位置,两者的偏差值会随着线速度的增加而增大。位置轴的动态跟随误差监视功能就是对这个偏差进行监视,如果该偏差超过了一个设定门限值,那么系统会报50102错误,轴的默认响应是去使能。由于位置偏差大小与运行的线速度有关,线速度越高,位置的偏差越大,所以所设定的跟随误差监视门限值是与线速度设定值相关的。

图2 轴的动态跟随误差监视
如图2所示,在低于一个指定的速度Minimum velocity for dynamic following error monitoring时,跟随误差监视门限是一个常数Constant following error;在高于该速度时,监视门限与设定速度成线性关系,最大监视门限Maximum perm. Following error对应了最大速度设定值Max velocity。
可以通过专家列表中的配置数据TypeOfAxis.NumberOfDataSets.DataSet_1.DynamicFollowing.dynamicFollowing.warningLimit 配置一个报警门限值,这是一个相对于监视门限的百分数,当超过该报警门限值,会出现一个报警50103 ,Warning limit of dynamic following error monitoring reached。
5 速度偏差监视(Velocity Error Monitoring)
速度偏差监视功能仅适用于速度控制方式下,比如速度轴或者位置轴在速度控制模式下的运动。
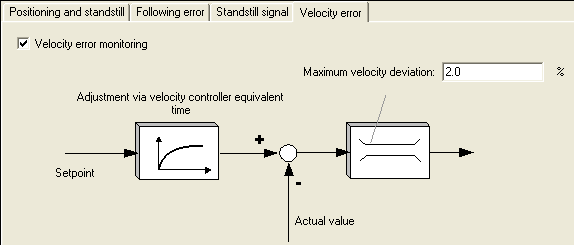
图3 轴的速度误差监控功能
当轴在速度方式下运行时,滤波后的实际速度与设定速度的偏差超过一个门限值Maximum velocity deviation后,系统会报错50101,轴的默认响应是去使能。
关键词
SIMOTION,轴,监视功能


- 评论
更多
-
分享

手机扫码分享文档(需在手机端重新登录账号)
- 收藏 收藏
- 点赞 点赞
- 纠错 纠错







 关联文档
关联文档
 看过该文档的用户还看过哪些文档
看过该文档的用户还看过哪些文档






{{item.nickName}}