




















 官方商城-正品备件
官方商城-正品备件
 DIMOIS
DIMOIS
- {{item.name}}
更多

使用TIA博途StartDrive调试S200

发布时间:2025年03月28日
- 3
- 7296
主要介绍 TIA 博途 StartDrive 调试S200的功能使用方法。
使用TIA博途Startdrive引导式快速设置S200
一、引导式快速设置内容:

- 分配运动控制:斜坡函数发生器和位置控制器分配,即控制模式选择
- 应用:转速或者定位控制选择、速度&位置单位选择
- 限值设置
- 应用设置:零点设置
- I/O配置
- 报文选择
二、引导式快速设置详解
1、分配运动控制
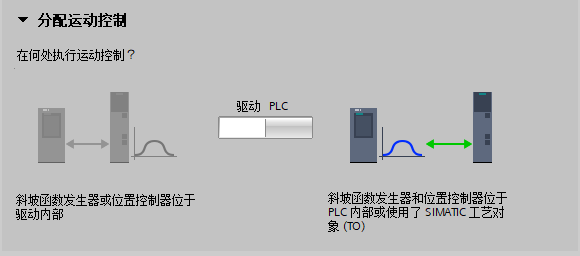
定位控制时:
选择在PLC处执行运动控制时,常见使用组态TO工艺对象对S200进行控制;
当选择在驱动器执行运动控制时,常见使用EPOS基本定位器对S200进行控制;
2、应用类型:
在“应用”设置中,首先设置转速控制或定位控制:
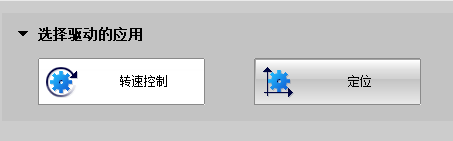
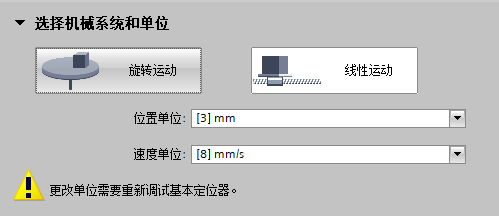
若选择定位控制后,还可以继续设置机械系统结构、控制单位、是否启用模态轴等。
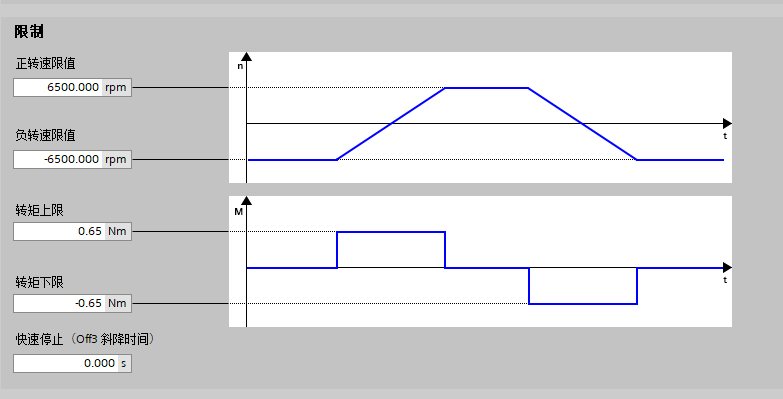
3、限值设置
转速控制时,限值包括:正/负转速限值、转矩上下限、快速停止时间
定位控制时,“限值”中可以设置:最大速度、最大加速度、最大减速度、最大加加速度以及与定位范围相关的硬限位、软限位设置。
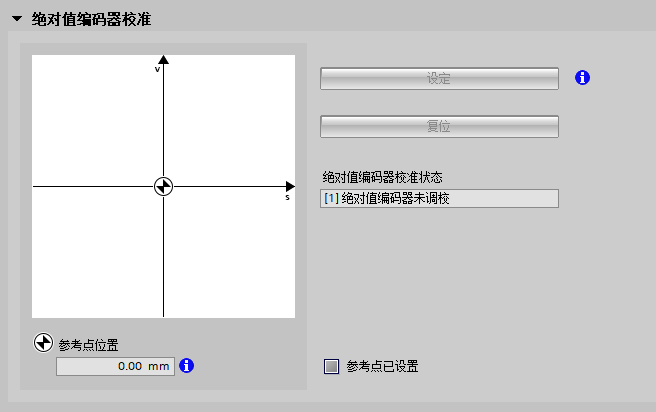
4、应用设置
“应用设置”为定位控制下的回零参数设置,分为两部分:主动回参考点(主动回零)参数设置和绝对值编码器校准。

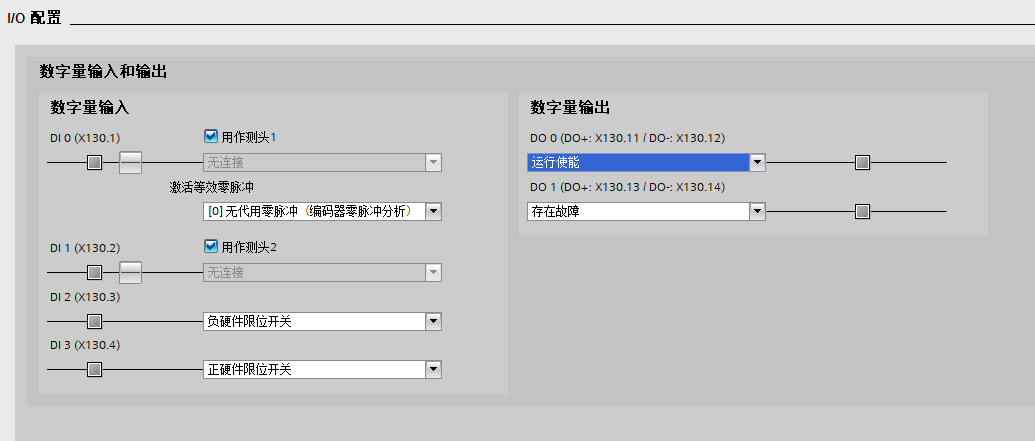
5、I/O配置
可进行驱动器数字量输入、数字量输出的基本功能设置,以及开启/关闭高速输入DI点测量输入功能;
6、报文(仅离线)
选择配置需要的标准报文,用于与上位控制器(PLC)进行循环数据交换。
对于实际应用中,SINAMICS S200 PN伺服驱动器报文的选择,基于以下几方面综合考虑:
- 确定控制需求:首先明确系统的运动控制要求,包括速度、位置、扭矩等控制模式,不同的控制需求选用合适的控制报文。例如,报文1和报文2报文内容中没有位置控制、状态报文字,无法满足闭环位置控制需求;
- 上位控制器(PLC)的类型: 报文5和报文105为S7-1500专用报文,仅在与S7-1500/1500T系列PLC连接时才可以选择报文5和报文105。
- 通信方式选择:PROFINET 提供了 PROFINET RT(实时)和 PROFINET IRT(等时实时)两种实时通信方式,其中IRT通信相比RT通信更适合于传输更高精确时间要求的数据。使用IRT通信时,必须采用带有动态伺服控制(DSC)功能的报文5或报文105。
- 工艺功能:对于同步、凸轮等高级工艺对象,通常选用数据传输实时性好的IRT通信方式的报文105。
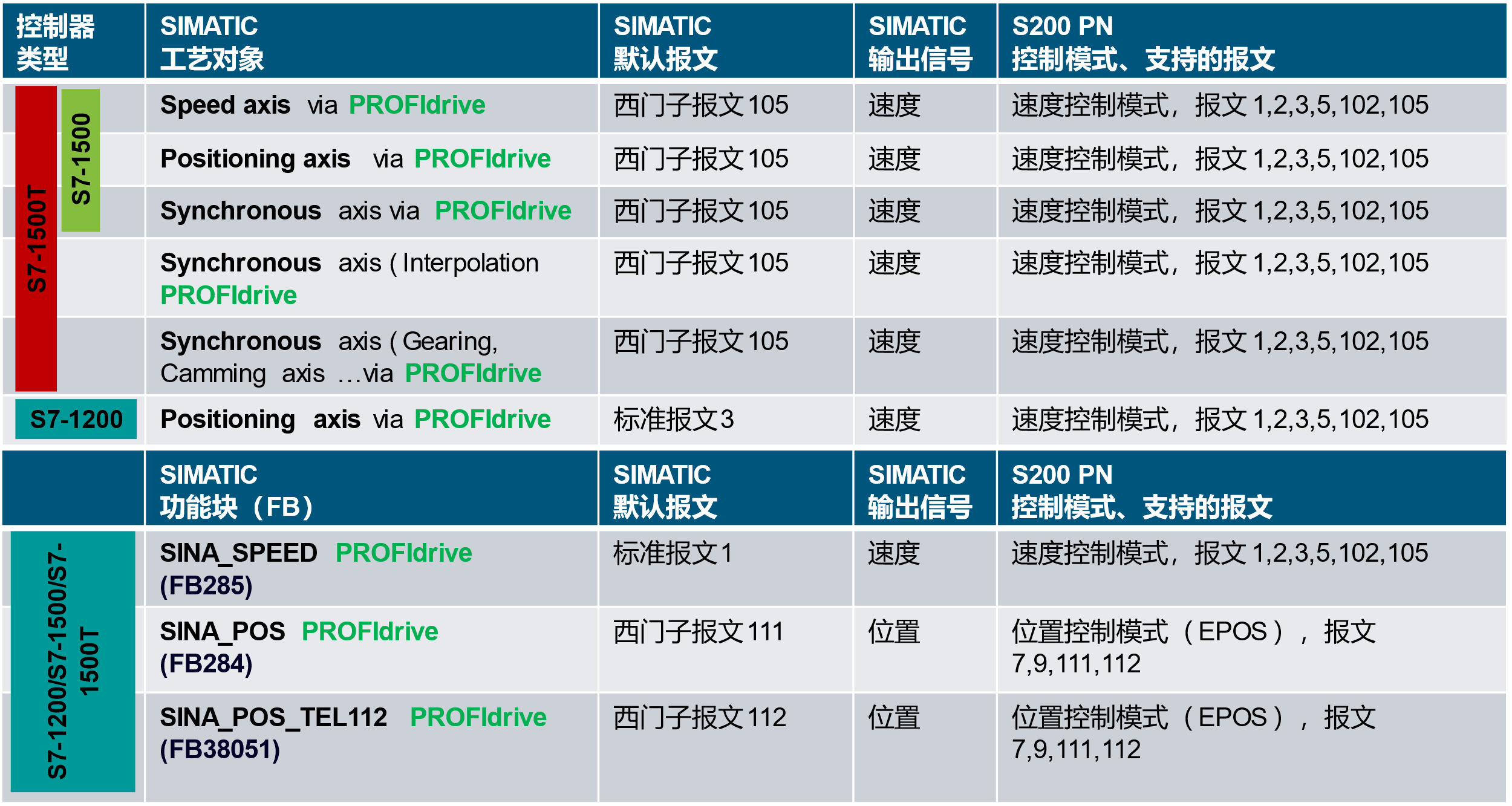
综上,对于常见应用场景下的报文选用情况进行总结,详见下表所示:
常见应用场景下的报文选择

- 评论
更多
-
分享
扫码分享
- 收藏 收藏
- 点赞 点赞
- 纠错 纠错






{{item.nickName}}